DirectX-Specs
DirectX Raytracing (DXR) Functional Spec
v1.45 7/10/2026
Contents
- Intro
- Overview
- Design goals
- Walkthrough
- Initiating raytracing
- Ray generation shaders
- Rays
- Raytracing output
- Ray-geometry interaction diagram
- Geometry and acceleration structures
- Acceleration structure updates
- Built-in ray-triangle intersection - triangle mesh geometry
- Intersection shaders - procedural primitive geometry
- Any hit shaders
- Closest hit shaders
- Miss shaders
- Hit groups
- TraceRay control flow
- Flags per ray
- Instance masking
- Callable shaders
- Resource binding
- Shader identifier
- Shader record
- Shader tables
- Indexing into shader tables
- Inline raytracing
- Shader Execution Reordering
- Opacity micromaps
- Shader management
- Problem space
- State objects
- Subobjects
- State object types
- DXIL libraries and state objects example
- Subobject association behavior
- Subobject association requirements
- State object caching
- Incremental additions to existing state objects
- System limits and fixed function behaviors
- Addressing calculations within shader tables
- Acceleration structure properties
- Acceleration structure update constraints
- Acceleration structure memory restrictions
- Fixed function ray-triangle intersection specification
- Ray extents
- Ray recursion limit
- Pipeline stack
- Shader limitations resulting from independence
- Execution and memory ordering
- General tips for building acceleration structures
- Determining raytracing support
- Tools support
- API
- Device methods
- CheckFeatureSupport
- CreateStateObject
- CreateStateObject Structures
- D3D12_STATE_OBJECT_DESC
- D3D12_STATE_OBJECT_TYPE
- D3D12_STATE_SUBOBJECT
- D3D12_STATE_SUBOBJECT_TYPE
- D3D12_STATE_OBJECT_CONFIG
- D3D12_STATE_OBJECT_FLAGS
- D3D12_GLOBAL_ROOT_SIGNATURE
- D3D12_LOCAL_ROOT_SIGNATURE
- D3D12_DXIL_LIBRARY_DESC
- D3D12_EXPORT_DESC
- D3D12_EXPORT_FLAGS
- D3D12_EXISTING_COLLECTION_DESC
- D3D12_HIT_GROUP_DESC
- D3D12_HIT_GROUP_TYPE
- D3D12_RAYTRACING_SHADER_CONFIG
- D3D12_RAYTRACING_PIPELINE_CONFIG
- D3D12_RAYTRACING_PIPELINE_CONFIG1
- D3D12_RAYTRACING_PIPELINE_FLAGS
- D3D12_NODE_MASK
- D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION
- D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION
- CreateStateObject Structures
- AddToStateObject
- GetRaytracingAccelerationStructurePrebuildInfo
- CheckDriverMatchingIdentifier
- CreateCommandSignature
- Command list methods
- BuildRaytracingAccelerationStructure
- BuildRaytracingAccelerationStructure Structures
- D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC
- D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS
- D3D12_ELEMENTS_LAYOUT
- D3D12_RAYTRACING_GEOMETRY_DESC
- D3D12_RAYTRACING_GEOMETRY_TYPE
- D3D12_RAYTRACING_GEOMETRY_FLAGS
- D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC
- D3D12_RAYTRACING_GEOMETRY_AABBS_DESC
- D3D12_RAYTRACING_AABB
- D3D12_RAYTRACING_INSTANCE_DESC
- D3D12_RAYTRACING_INSTANCE_FLAGS
- D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC
- D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC
- D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX
- D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC
- D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT
- D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY
- D3D12_RAYTRACING_OPACITY_MICROMAP_DESC
- D3D12_RAYTRACING_OPACITY_MICROMAP_STATE
- D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE
- BuildRaytracingAccelerationStructure Structures
- EmitRaytracingAccelerationStructurePostbuildInfo
- EmitRaytracingAccelerationStructurePostbuildInfo Structures
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION_DESC
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE_DESC
- EmitRaytracingAccelerationStructurePostbuildInfo Structures
- CopyRaytracingAccelerationStructure
- CopyRaytracingAccelerationStructure Structures
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE
- D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER
- D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1
- D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE
- D3D12_RAYTRACING_SERIALIZED_BLOCK
- D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE
- D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER
- CopyRaytracingAccelerationStructure Structures
- SetPipelineState1
- DispatchRays
- ExecuteIndirect
- BuildRaytracingAccelerationStructure
- ID3D12StateObjectProperties methods
- Additional resource states
- Additional root signature flags
- Additional SRV type
- Constants
- Device methods
- HLSL
- Types, enums, subobjects and concepts
- Shaders
- Intrinsics
- System value intrinsics
- RayQuery
- RayQuery flags
- RayQuery intrinsics
- RayQuery enums
- RayQuery TraceRayInline
- RayQuery Proceed
- RayQuery Abort
- RayQuery CandidateType
- RayQuery CandidateProceduralPrimitiveNonOpaque
- RayQuery CommitNonOpaqueTriangleHit
- RayQuery CommitProceduralPrimitiveHit
- RayQuery CommittedStatus
- RayQuery RayFlags
- RayQuery WorldRayOrigin
- RayQuery WorldRayDirection
- RayQuery RayTMin
- RayQuery CandidateTriangleRayT
- RayQuery CommittedRayT
- RayQuery CandidateInstanceIndex
- RayQuery CandidateInstanceID
- RayQuery CandidateInstanceContributionToHitGroupIndex
- RayQuery CandidateGeometryIndex
- RayQuery CandidatePrimitiveIndex
- RayQuery CandidateObjectRayOrigin
- RayQuery CandidateObjectRayDirection
- RayQuery CandidateObjectToWorld3x4
- RayQuery CandidateObjectToWorld4x3
- RayQuery CandidateWorldToObject3x4
- RayQuery CandidateWorldToObject4x3
- RayQuery CommittedInstanceIndex
- RayQuery CommittedInstanceID
- RayQuery CommittedInstanceContributionToHitGroupIndex
- RayQuery CommittedGeometryIndex
- RayQuery CommittedPrimitiveIndex
- RayQuery CommittedObjectRayOrigin
- RayQuery CommittedObjectRayDirection
- RayQuery CommittedObjectToWorld3x4
- RayQuery CommittedObjectToWorld4x3
- RayQuery CommittedWorldToObject3x4
- RayQuery CommittedWorldToObject4x3
- RayQuery CandidateTriangleBarycentrics
- RayQuery CandidateTriangleFrontFace
- RayQuery CandidateTriangleObjectPositions
- RayQuery CommittedTriangleBarycentrics
- RayQuery CommittedTriangleFrontFace
- RayQuery CommittedTriangleObjectPositions
- HitObject
- HitObject Interaction with Payload Access Qualifiers
- HitObject TraceRay
- HitObject FromRayQuery
- HitObject MakeMiss
- HitObject MakeNop
- HitObject Invoke
- HitObject IsMiss
- HitObject IsHit
- HitObject IsNop
- HitObject GetRayFlags
- HitObject GetRayTMin
- HitObject GetRayTCurrent
- HitObject GetWorldRayOrigin
- HitObject GetWorldRayDirection
- HitObject GetObjectRayOrigin
- HitObject GetObjectRayDirection
- HitObject GetObjectToWorld3x4
- HitObject GetObjectToWorld4x3
- HitObject GetWorldToObject3x4
- HitObject GetWorldToObject4x3
- HitObject GetInstanceIndex
- HitObject GetInstanceID
- HitObject GetGeometryIndex
- HitObject GetPrimitiveIndex
- HitObject GetHitKind
- HitObject GetAttributes
- HitObject GetShaderTableIndex
- HitObject SetShaderTableIndex
- HitObject LoadLocalRootTableConstant
- MaybeReorderThread
- MaybeReorderThread with HitObject
- MaybeReorderThread with coherence hint
- MaybeReorderThread with HitObject and coherence hint
- MaybeReorderThread Example 1
- MaybeReorderThread Example 2
- MaybeReorderThread Example 3
- Reorder points
- MaybeReorderThread divergence behavior
- Separation of MaybeReorderThread and HitObject Invoke
- MaybeReorderThread and Invoke example 1: Common computations that rely on large raygen state
- MaybeReorderThread and Invoke example 2: Do common computations with hit coherence
- MaybeReorderThread and Invoke example 3: Same surface shader but different behaviour in raygen
- MaybeReorderThread and Invoke example 4: Unified shading
- MaybeReorderThread and Invoke example 5: Coherently break render loop on miss
- MaybeReorderThread and Invoke example 6: Two-step shading, single reorder
- MaybeReorderThread and Invoke example 7: Live state optimization
- MaybeReorderThread and Invoke example 8: Back-to-back calls
- Payload access qualifiers
- DDI
- General notes
- State object DDIs
- State subobjects
- Reporting raytracing support from the driver
- Change log
Intro
This document describes raytracing support in D3D12 as a first class peer to compute and graphics (rasterization). Similar to the rasterization pipeline, the raytracing pipeline strikes a balance between programmability, to maximize expressiveness for applications; and fixed function, to maximize the opportunity for implementations to execute workloads efficiently.
Overview
The system is designed to allow implementations to process rays independently. This includes the various types of shaders (to be described), which can only ever see a single input ray and cannot see or depend on the order of processing of other rays in flight. Some shader types can generate multiple rays over the course of a given invocation, and if desired look at the result of a ray’s processing. Regardless, generated rays that are in-flight can never be dependent on each other.
This ray independence opens up the possibility of parallelism. To exploit this during execution, a typical implementation would balance between scheduling and other tasks.
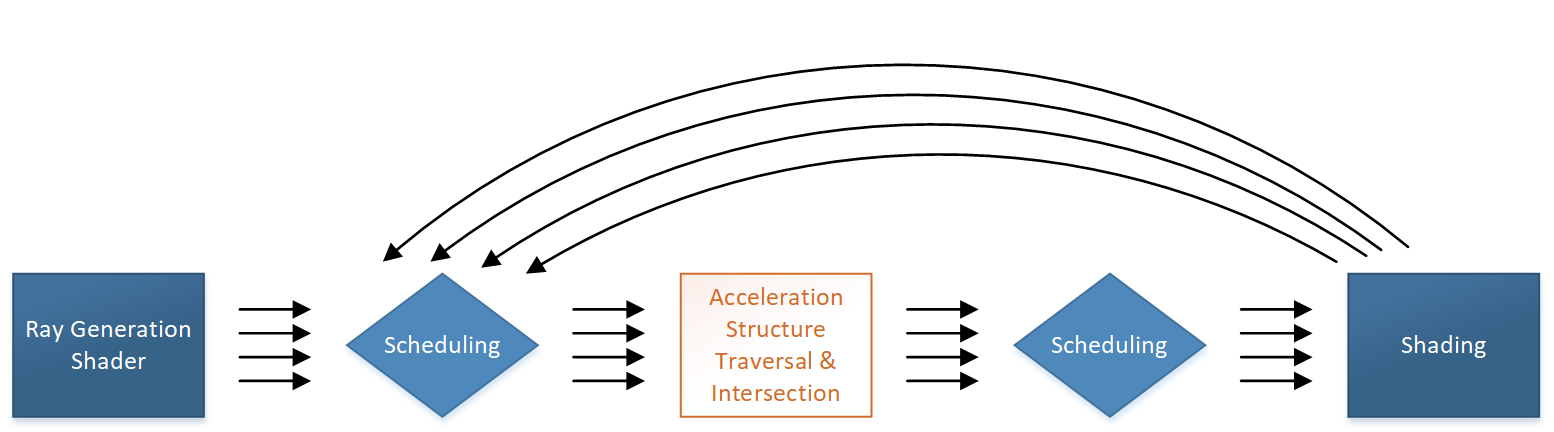
(The above diagram is only a loose approximation of what an implementation might do – don’t read it too deeply.)
The scheduling portions of execution are hard-wired, or at least implemented in an opaque way that can be customized for the hardware. This would typically employ strategies like sorting work to maximize coherence across threads. From an API point of view, ray scheduling is built-in functionality.
The other tasks in raytracing are a combination of fixed function and fully or partially programmable work:
The largest fixed function task is traversing acceleration structures that have been built out of geometry provided by the application, with the goal of efficiently finding potential ray intersections. Triangle intersection is also supported in fixed function.
Shaders expose application programmability in several areas:
-
generating rays
-
determining intersections for implicit geometry (as opposed to the fixed function triangle intersection option)
-
processing ray intersections (such as surface shading) or misses
The application also has a high level of control over exactly which out of a pool of shaders to run in any given situation, as well as flexibility in the resources such as textures that each shader invocation has access to.
Design goals
-
Implementation agnostic
-
Support for hardware with or without dedicated raytracing acceleration via single programming model
-
Expected variances in hardware capability are captured in a clean feature progression, if necessary at all
-
-
Embrace relevant D3D12 paradigms
-
Applications have explicit control of shader compilation, memory resources and overall synchronization
-
Applications can tightly integrate raytracing with compute and graphics
-
Incrementally adoptable
-
-
Friendly to tools such as PIX
- Running tools such as API capture / playback don’t incur unnecessary overhead to support raytracing
Walkthrough
The following walkthrough broadly covers most components of this feature. Further details will be described later in the document, including dedicated sections listing APIs and HLSL details.
Initiating raytracing
First a pipeline state containing raytracing shaders must be set on a command list, via SetPipelineState1().
Then, just as rasterization is invoked by Draw() and compute is invoked via Dispatch(), raytracing is invoked via DispatchRays(). DispatchRays() can be called from graphics command lists, compute command lists or bundles.
Tier 1.1 implementations also support GPU initiated DispatchRays() via ExecuteIndirect().
Tier 1.1 implementations also support a variant of raytracing that can be invoked from any shader stage (including compute and graphics shaders), but does not involve any other shaders - instead processing happens logically inline with the calling shader. See Inline raytracing.
Ray generation shaders
DispatchRays() invokes a grid of ray generation shader invocations. Each invocation (thread) of a ray generation shader knows its location in the overall grid, can generate arbitrary rays via TraceRay(), and operates independently of other invocations. So there is no defined order of execution of threads with respect to each other.
HLSL details are here.
Rays
A ray is: an origin, direction and parametric interval (TMin, TMax) in which intersections may occur at T locations along the interval. To be concrete, positions along the ray are: origin + T*direction (the direction does not get normalized).
There is some nuance to the exact bounds used, (TMin..TMax) vs [TMin…TMax] for intersections to count, depending on the geometry type, defined in ray extents.
A ray is accompanied by a user defined payload that is modifiable as the ray interacts with geometry in a scene and also visible to the caller of TraceRay() upon its return. In the case of the Inline raytracing variation, the payload isn’t an explicit entity, rather it is just a part of whatever user variables the caller of RayQuery::TraceRayInline() has in its execution scope.
The TMin value tracked by the system never changes over the lifetime of a ray. On the other hand, as intersections are discovered (in arbitrary spatial order), the system reduces TMax to reflect the closest intersection so far. When all intersections are complete, TMax represents the closest intersection, the relevance of which appears later.
Raytracing output
In raytracing, shaders output results, such as color samples for an image, manually through UAVs.
Ray-geometry interaction diagram
Upcoming sections describe this picture, plus concepts not shown that aren’t specific to geometry, like “miss shaders”.
Geometry and acceleration structures
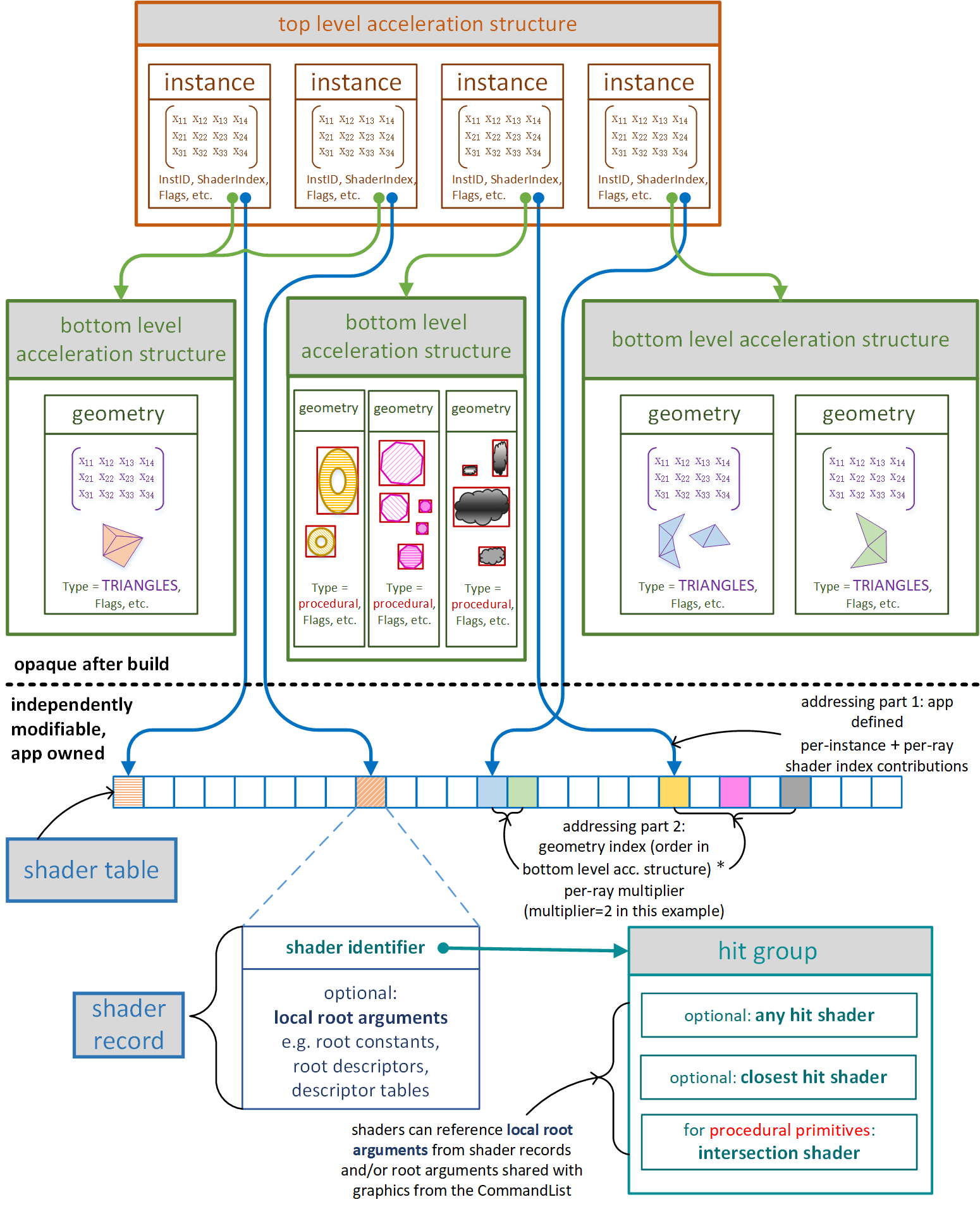
Geometry for a scene is described to the system using two levels of acceleration structures: Bottom-level acceleration structures each consist of a set of geometries that are building blocks for a scene. A top-level acceleration structure represents a set of instances of bottom-level acceleration structures.
Within a given bottom-level acceleration structure there can be any number: (1) triangle meshes, or (2) procedural primitives initially described only by an axis aligned bounding box (AABB). A bottom-level acceleration structure can only contain a single geometry type. These geometry types are described more later. Given a definition of a set of these geometries (via array of D3D12_RAYTRACING_GEOMETRY_DESC), the application calls BuildRaytracingAccelerationStructure() on a CommandList to ask the system to build an opaque acceleration structure representing it into GPU memory owned by the application. This acceleration structure is what the system will use to intersect rays with the geometry.
Given a set of bottom-level acceleration structures, the application then defines a set of instances (by pointing to D3D12_RAYTRACING_INSTANCE_DESC structures living in GPU memory). Each instance points to a bottom-level acceleration structure and includes some other information for specializing the instance. A couple of examples of the specializing information included in an instance definition are: a matrix transform (to place the instance in the world), and a user defined InstanceID (identifying the unique instance to shaders).
Instances are sometimes referred to in this specification as geometry instances for clarity.
This set of geometry instance definitions is given to the implementation (via BuildRaytracingAccelerationStructure() to generate an opaque top-level acceleration structure into GPU memory owned by the application. This acceleration structure represents what the system traces rays against.
An application can use multiple top-level acceleration structures simultaneously, binding them to relevant shaders as input resources (see RaytracingAccelerationStructure in HLSL). That way a given shader can trace rays into different sets of geometry if desired.
The two level hierarchy for geometry lets applications strike a balance between intersection performance (maximized by using larger bottom-level acceleration structures) and flexibility (maximized by using more, smaller bottom-level acceleration structures and more instances in a top-level acceleration structure).
See also Clustered Geometry for an alternative way to construct BLAS from clusters of primitives, and Partitioned TLAS for a TLAS variant supporting partial updates.
See Acceleration structure properties for a discussion of rules and determinism.
Acceleration structure updates
Apps can request to make an acceleration structure updateable, or request an update to an updateable acceleration structure, via D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS in BuildRaytracingAccelerationStructure().
The updateable acceleration structures (before and after they have been updated) will not be as optimal in terms of raytracing performance as building a static acceleration structure from scratch. An update will be faster, however, than building an acceleration structure from scratch.
For updates to be viable to implement, constraints are in place on what an app is allowed to change. For instance, with triangle geometry in bottom-level acceleration structures only vertex positions can be updated. There is much more freedom of update allowed for instance descriptions in top-level acceleration structures. For more detail see Acceleration structure update constraints.
Built-in ray-triangle intersection - triangle mesh geometry
As mentioned above, geometry in a bottom-level acceleration structure can be represented as triangle meshes which use built-in ray-triangle intersection support that passes triangle barycentrics describing the intersection to subsequent shaders.
Intersection shaders - procedural primitive geometry
An alternative representation for geometry in a bottom-level acceleration structure is an axis aligned bounding box which contains a procedural primitive. The surface is defined by running an application defined intersection shader to evaluate intersections when a ray hits the bounding box. The shader defines the attributes describing intersections to pass on to subsequent shaders, including the current T value.
Using intersection shaders instead of the build-in ray-triangle intersection is less efficient but offers far more flexibility.
HLSL details are here.
Minor intersection shader details
Intersection shaders may be executed redundantly. There is no guarantee that for a given ray that the intersection shader only executes once for a given procedural primitive encountered in the acceleration structure. Multiple invocations for a given ray and primitive would be redundant (wasteful), yet implementations are free to have this behavior if the implementation believes the tradeoff is worth it for some reason. The implication of this is apps must be careful about authoring side effects into intersection shaders, such as doing UAV writes from them or in particular finding different intersections each invocation. The results may differ depending on the implementation.
Regardless if multiple invocations of intersection shaders occur for a
given ray, the implementation must always honor the app’s choice of
flags on the geometry, which may include
D3D12_RAYTRACING_GEOMETRY_FLAG_NO_DUPLICATE_ANYHIT_INVOCATION.
With this flag, the any hit shader (described next)
must only execute once for a given intersection on a given ray.
Any hit shaders
A unique shader can be defined to run whenever a ray intersects a geometry instance within the current ray extents, regardless of position along the ray relative to other intersections. This is an any hit shader.
Any hit shaders can read intersection attributes, modify ray payload, indicate a hit should be ignored (IgnoreHit()), accept the hit and continue (by exiting execution) or accept the hit and tell the system to stop searching for more intersections (AcceptHitAndEndSearch()).
There is no defined order of execution of any hit shaders for the intersections along a ray path. If an any hit shader accepts a hit, its T value becomes the new TMax. So depending on the order that intersections are found all else being equal, different numbers of any hit shader invocations would occur.
The system cannot execute multiple any hit shaders for a given ray at the same time - as such, any hit shaders can freely modify their ray payload without worrying about conflicting with other shaders.
Any hit shaders are useful, for instance, when geometry has transparency. A particular case is transparency in shadow determination, where if the any hit shader finds that the current hit location is opaque it can tell the system to take this hit but stop searching for more intersections (just looking for anything in a ray’s path). In many cases though, any hit shaders are not needed, yielding some execution efficiency: In the absence of an any hit shader for a given geometry instance that has an intersection T within the current ray interval, the implementation simply accepts the intersection and reduces TMax of the current ray interval to T.
Unlike some of the other shader types to be described, any hit shaders cannot trace new rays, as doing so here would lead to an unreasonable explosion of work for the system.
HLSL details are here.
Closest hit shaders
A unique shader can be defined to run for each geometry in an instance if it produced the closest accepted intersection within the ray extents. This is a closest hit shader.
Closest hit shaders can read intersection attributes, modify ray payload, and generate additional rays.
A typical use of a closest hit shader would be to evaluate the color of a surface and either contribute to the ray payload or store data to memory (via UAV).
Any hit shaders (if any) along a ray’s path are all executed before a closest hit shader (if any). In particular, if both shader types are defined for the geometry instance at the closest hit’s T value, the any hit shader will always run before the closest hit shader.
HLSL details are here.
Miss shaders
For rays that do not intersect any geometry, a miss shader can be specified. Miss shaders can modify ray payload and generate additional rays. Since there was no intersection, there are no intersection attributes available.
HLSL details are here.
Hit groups
A hit group is one or more shaders consisting of: {0 or 1 intersection shader, 0 or 1 any hit shader, 0 or 1 closest hit shader}. Individual geometries in a given instance each refer to a hit group to provide their shader code. The point of the grouping is to allow implementations to be able to compile and execute the group efficiently as rays interact with geometry.
Ray generation shaders and miss shaders aren’t part of hit groups because they aren’t involved directly with geometry.
If a hit group contains an intersection shader, it can only be used with procedural primitive geometry. If a hit group does not contain an intersection shader, it can only be used with triangle geometry.
A hit group with no shaders at all is also possible, by simply using NULL as it’s shader identifier (concept described later). This counts as opaque geometry.
An empty hit group can be useful, for example, if the app doesn’t want to do anything for hits and only cares about the miss shader running when nothing has been hit.
TraceRay control flow
This is what happens when a shader calls TraceRay():
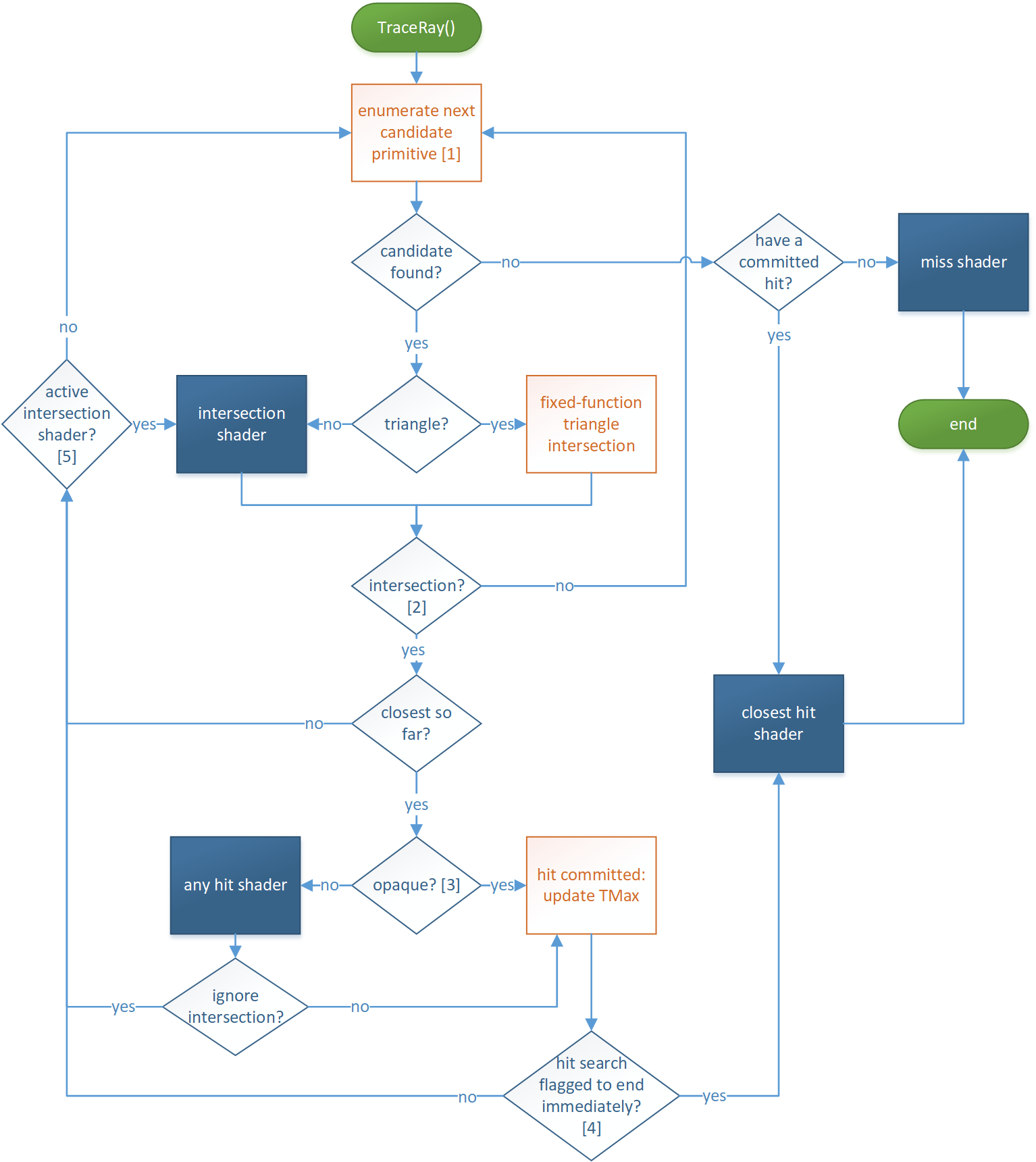
[1] This stage searches acceleration structures to enumerate primitives that may intersect the ray, conservatively: If a primitive is intersected by the ray and is within the current ray extents, it is guaranteed to be enumerated eventually. If a primitive is not intersected by the ray or is outside the current ray extents, it may or may not be enumerated. Note that TMax is updated when a hit is committed (internal to the traversal, not visible to the application).
[2] If the intersection shader is running and calls ReportHit(), the subsequent logic handles the intersection and then returns to the intersection shader via [5].
[3] Opaqueness is determined by examining the geometry and instance flags of the intersection as well as the ray flags. Also if there is no any hit shader, the geometry is considered opaque.
[4] The search for hits is ended at this point if either the
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH ray flag
is set, or if the any hit shader called
AcceptHitAndEndSearch(), which aborts the
execution of the any hit shader at the
AcceptHitAndEndSearch()
call site. Since at least this hit was committed, whichever hit is
closest so far has the closest hit shader run on it, if present (and not
disabled via RAY_FLAG_SKIP_CLOSEST_HIT_SHADER).
[5] If the primitive that was intersected was not a triangle, an intersection shader is still active and resumes execution, given it may contain more calls to ReportHit().
Flags per ray
TraceRay() supports a selection of ray flags to override transparency, culling, and early-out behavior.
To illustrate the utility of ray flags, consider how they would help implement one of multiple approaches to rendering shadows. Suppose an app wants to trace rays to distant light sources to accumulate light contributions for rays that don’t hit any geometry, using tail recursion.
TraceRay() could be called with
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH | RAY_FLAG_SKIP_CLOSEST_HIT_SHADERflags from the ray generation shader, followed by exiting the shader withn nothing else to do. Any hit shaders, if present on geometry, would execute to determine transparency, though these shader invocations could be skipped if desired by also includingRAY_FLAG_FORCE_OPAQUE.If any geometry hit is encountered (not necessarily the closest hit), ray processing stops, due to
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH. A hit has been committed/found, but there is no closest hit shader invocation, due toRAY_FLAG_SKIP_CLOSEST_HIT_SHADER. So processing of the ray ends with no action.Rays that don’t hit anything cause the miss shader to run, where light contribution is evaluated and written to a UAV. So in this scenario, geometry in the acceleration structure acted to cull miss shader invocations, ignoring every other type of shader (unless needed for transparency evaluation).
Skipping shaders can alternatively be accomplished by setting shader bindings to NULL (shader bindings details are discussed later on). But the use of ray flags in this example means the implementation doesn’t even have to look up shader bindings (only to find that they are NULL). Which also means the app doesn’t have to bother configuring NULL bindings anywhere.
Instance masking
Geometry instances in top-level acceleration structures each contain an 8-bit user defined InstanceMask. TraceRay() has an 8-bit input parameter InstanceInclusionMask which gets ANDed with the InstanceMask from any geometry instance that is a candidate for intersection. If the result of the AND is zero, the intersection is ignored.
This feature allows apps to represent different subsets of geometry within a single acceleration structure as opposed to having to build separate acceleration structures for each subset. The app can choose how to trade traversal performance versus overhead for maintaining multiple acceleration structures.
An example would be culling objects that an app doesn’t want to contribute to a shadow determination but otherwise remain visible.
Another way to look at this is:
The bits in InstanceMask define which “groups” an instance belongs to. (If it is set to zero the instance will always be rejected!)
The bits in the ray’s InstanceInclusionMask define which groups to include during traversal.
Callable shaders
Callable shaders are meant to assist with pathological shader permutations or shader networks, at the potential expense of some execution efficiency.
Callable shaders are defined through a shader table, described later, but basically a user defined function table. The table is identified by providing a GPU virtual address (CallableShaderTable in D3D12_DISPATCH_RAYS_DESC) to DispatchRays() calls. The contents of the table contain shader identifiers retrieved from state objects (described later) via GetShaderIdentifier().
A given callable shader is called (via CallShader() in HLSL) by indexing into the shader table to pick which callable shader to call from any of the raytracing shaders. A shader invocation making a call just produces one invocation of a callable shader, like a subroutine call with arbitrary in/out parameters. So when the call returns, the caller continues as would be expected. Callable shaders are separately compiled from other shaders, so compilers can’t make any assumptions about caller/callee other than the agreed on function signature. The implementation chooses how to make use of a stack of user defined maximum size to store parameters (that it didn’t decide to pass via registers) and/or live state – see Pipeline stack.
Implementations are expected to schedule callable shaders for execution separately from the calling shader, as opposed to the code being optimally inlined with the caller. This is similar to the way tracing rays causes other shaders to run. So using this feature to execute a tiny program may not be worth the minimum overhead of scheduling the shader to run.
In the absence of callable shaders as a feature, applications could achieve the same result by tracing rays with a NULL acceleration structure, which causes a miss shader to run, repurposing the ray payload and potentially the ray itself as function parameters. Except doing this miss shader hack would be wasteful in terms of defining a ray that is guaranteed to miss for no reason. Rather than supporting this hack, callable shaders are seen as a cleaner equivalent.
The bottom line is implementations should not have difficulty supporting callable shaders given the system has to support miss shaders anyway. At the same time, apps must not expect execution efficiency that would greatly exceed that of invoking a miss shader from a raytrace (minus the actual ray processing overhead).
Resource binding
Since rays can go anywhere, in raytracing not only must all shaders for a scene be simultaneously available to execute, but also their resource bindings. In fact, the selection of what shader to run (by shader Identifier, described later) is considered just another resource binding along with traditional root signature bindings: descriptor tables, root descriptors and root constants.
Descriptor heaps set on CommandLists via SetDescriptorHeaps() are shared by raytracing, graphics and compute.
Local root signatures vs global root signatures
For raytracing shaders, bindings can be defined by one or both of the following root signatures:
-
A local root signature, whose arguments come from shader tables, described later, enabling each shader to have unique arguments.
-
A global root signature whose arguments are shared across all raytracing shaders and compute PSOs on CommandLists, set via SetComputeRootSignature() (or equivalent indirect state setting API if it ever exists).
Each raytracing shader used together can use different local root signatures but must use the same global root signature. The “global” root signature identical to the root signature used for compute state on command lists.
Different sets of shaders collected together in a State object (described later), may have different global root signatures, as long as during a DispatchRays() call (or equivalent indirect API if it ever exists) any shaders that get invoked use the same global root signature that is set on the CommandList as described above.
Unlike global root signatures, local root signatures have a larger limit on the number of entries they can hold, bounded by the maximum supported shader record stride of 4096 bytes, minus 32 bytes for shader identifier size = 4064 bytes max local root signature footprint. Shader identifiers and shader records are described further below.
The shader “register” bindings (e.g. t0, u0 etc.) specified by a local root signature can’t overlap with those in a global root signature for a given shader.
Note about static samplers: Local root signatures can define static samplers (just like global root signatures can), except that each local root signature used in a Raytracing pipeline state object (described later) must define any static samplers it uses identically as other local root signatures that define the same ones. So if any local root signature makes a definition for, say, sampler s0, all local root signatures that define s0 must use the same definition. Further, the total number of unique static samplers across local root signature and global root signature must fit in the static sampler limit for D3D12’s resource binding model.
The reason that local root signatures must not have any conflicting static sampler definitions is to enable shaders to be compiled individually on implementations that have to emulate static samplers using descriptor heaps. Such implementations can pick a fixed location in a sampler descriptor heap to place a static sampler, knowing that other shaders that might use a different local root signature and define the same sampler will use the same slot. Static samplers in the global root signature can also be handled the same way (given that as mentioned above, register bindings can’t overlap across global and local root signatures.
There is a discussion on shader visibility flags in root signatures here.
Shader identifier
A shader identifier is an opaque data blob of 32 bytes that uniquely identifies (within the current device / process) one of the raytracing shaders: ray generation shader, hit group, miss shader, callable shader. The application can request the shader identifier for any of these shaders from the system. It can be thought of as a pointer to a shader.
If the raytracing process encounters a NULL shader identifier from an app when looking for a shader to run, no shader is executed for that purpose, and the raytracing process continues. In the case of a hit group, a NULL shader identifier simply means no shader is executed for any of the types of shaders it contains.
An application might create the same shader multiple times. This could be the same code but with same or different export names, potentially across separate raytracing pipelines or collections of code (described later). In this case the seemingly identical shaders may or may not return the same identifier depending on the implementation. Regardless, execution behavior will be consistent with the specified shader code.
Shader record
shader record = {shader identifier, local root arguments for the shader}
A shader record simply refers to a region of memory owned by an application in the above layout. Since an application can retrieve a shader identifier for any raytracing shader, it can create shader records any way it wants, anywhere it wants. If a shader uses a local root signature, its shader record contains the arguments for that root signature. The maximum stride for shader records is 4096 bytes.
Shader tables
shader table = {shader record A}, {shader record B} ...
A shader table is a set of shader records in a contiguous region of memory. The start address must be aligned to 64 bytes (D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT).
Raytracing indexes in to shader tables (in various ways) to enable running unique shaders and resource bindings for all the different parts of a scene. Only the particular shader records that will be accessed need to be validly populated.
There is no API object for a shader table; the app merely identifies a region in memory as being a shader table. Rather, the parameters to DispatchRays() include pointers to memory that let apps identify (among other things) the following types of shader tables:
-
ray generation shader (single entry since only one shader record is needed)
Indexing into shader tables
The location in shader tables to find the appropriate shaders to use at a given geometry intersection is computed as the sum of various offsets provided by the application at different places, for flexibility.
Details are provided in Addressing calculations within shader tables, but basically the process starts at DispatchRays(), which provides base addresses and record strides for shader tables. Then each geometry and each geometry instance definition in a raytracing acceleration structure contribute values to the indexing. And the final contributions are provided by TraceRay() calls within shaders allow further differentiation of which shaders and arguments (bindings) to use with a given geometry instance, without having to change the geometries / instances or acceleration structures themselves.
Shader record stride
The application indicates a data stride it wants the system to use for records as a parameter to DispatchRays(). All shader table indexing arithmetic is done as multiples of this record stride. It can be any multiple of 32 bytes (D3D12_RAYTRACING_SHADER_RECORD_BYTE_ALIGNMENT) of size [0…4096] bytes.
If the stride is nonzero, the stride must be at least as large as the largest shader record. So there is some unused memory between shader records when they are smaller than the stride.
If the stride is 0, all indexing points to the same shader record. This is unlikely to be interesting, particularly given this would cause the local root signature to behave in a global way redundantly with the explicit global root signature. This could be handy for testing or manual debugging though.
Shader table memory initialization
When the system indexes in to a shader table using the stride and arrives at a record, a valid shader identifier must be there, followed by the appropriate amount of local root arguments. Individual local root arguments need only be initialized if the shader executing references them.
In a given record in a shader table, the root arguments that follow the shader identifier must match the local root signature the specified shader was compiled with. The argument layout is defined by packing each argument with padding as needed to align each to its individual (defined) size, and in the order declared in the local root signature. Root descriptors and descriptor handles (identifying descriptor tables) are each 8 bytes in size and therefore need to be at the nearest 8 byte aligned offset from the start of the record after whatever argument precedes it. Root constants are an array of DWORD values, and since they are the smallest data type available in the root signature, no extra padding or alignment is needed.
In the global root signature cost function, a descriptor table is considered to be one DWORD (4 bytes), despite the API handle type being an 8 byte value. For hardware that is constrained in their root argument space, they are able to compress this value by diffing it against the currently-bound root descriptor table to produce a 32-bit offset. Note that for a local root signature, the full 64-bit value should be placed in the shader table, which makes the local root signature size calculation different than the global root signature cost function.
Inline raytracing
TraceRayInline() is an alternative to TraceRay() that doesn’t use any separate shaders - all shading is handled by the caller. Both styles of raytracing use the same acceleration structures.
TraceRayInline(), as a member of the RayQuery object, actually does very little itself - it initializes raytracing parameters. This sets up the shader to call other methods of the RayQuery object to work through the actual raytracing process.
Shaders can instantiate RayQuery objects as local variables, each of which acts as a state machine for ray query. The shader interacts with the RayQuery object’s methods to advance the query through an acceleration structure and query traversal information. Accesses to the acceleration structure (e.g. box and triangle intersection) are abstracted and thus left to the hardware. Surrounding these fixed-function acceleration structure accesses, all necessary app shader code, for handling both enumerated candidate hits and the final result of a query (e.g. hit vs miss) can be contained in the individual shader driving the RayQuery.
RayQuery objects can be used in any shader stage, including compute shaders, pixel shaders etc. These can even be using in any raytracing shaders: any hit, closest hit etc., combining both raytracing styles.
Inline raytracing is supported by Tier 1.1 raytracing implementations.
Pseudocode examples are here.
The motivations for this second parallel raytracing system are both the any-shader-stage property as well as being open to the possibility that for certain scenarios the full dynamic- shader-based raytracing system may be overkill. The tradeoff is that by inlining shading work with the caller, the system has far less opportunity to make performance optimizations on behalf of the app. Still, if the app can constrain the complexity of its raytracing related shading work (while inlining with other non raytracing shaders) this path could be a win versus spawning separate shaders with the fully general path.
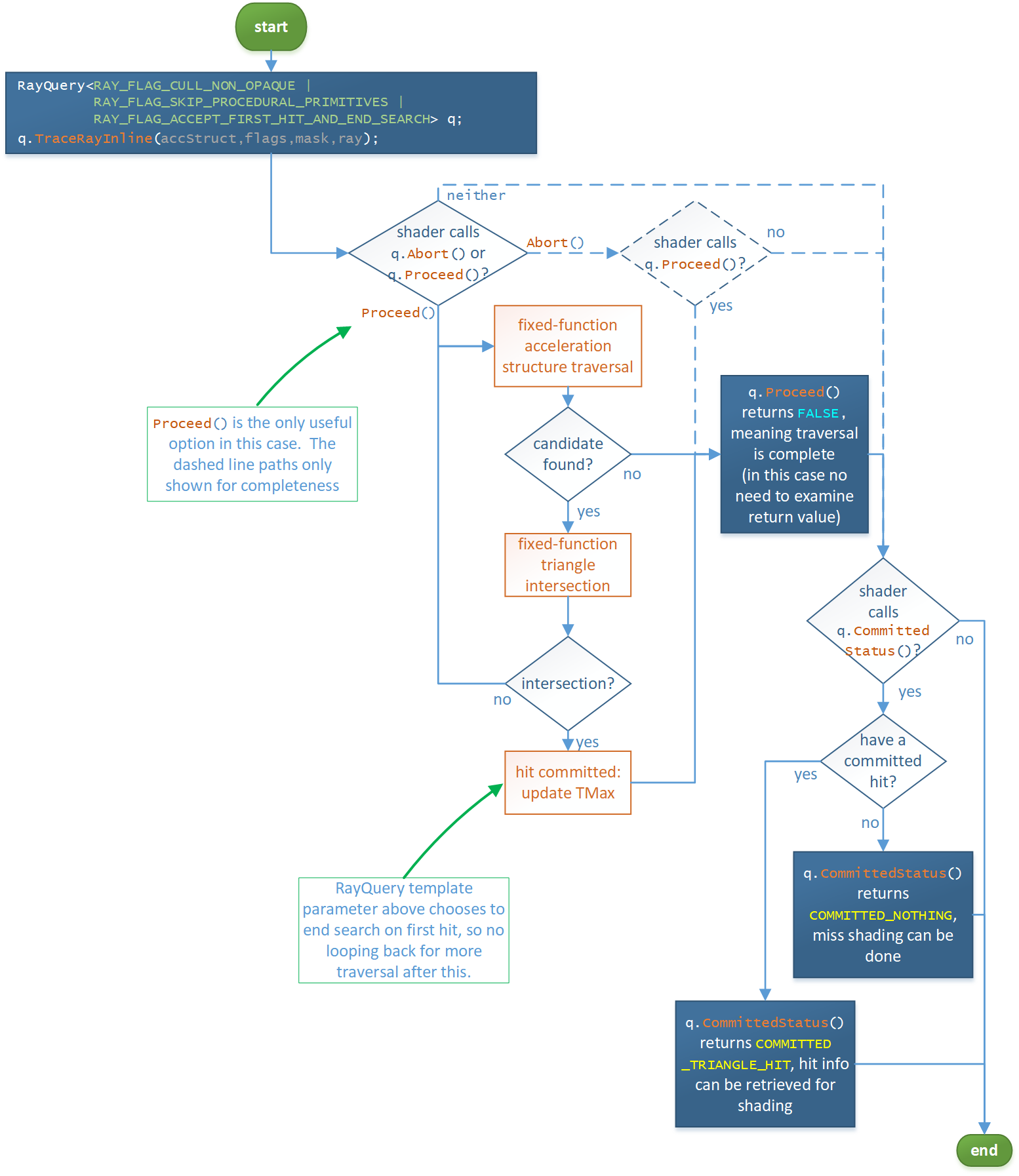
One simple scenario for inline raytracing is tracing rays with the
RayQueryobject initialized with template flags:RAY_FLAG_CULL_NON_OPAQUE | RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES | RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH, using an acceleration structure with only triangle based geometry. In this case the system can see that it is only being asked to find either a hit or a miss in one step, which it could potentially fast-path. This could enable basic shadow determination from any shader stage as long as no transparency is involved. Should more complexity in traversal be required, of course the full state machine is available for completeness and generality.It is likely that shoehorning fully dynamic shading via heavy uber-shading through inline raytracing will have performance that depends extra heavily on the degree of coherence across threads. Being careful not to lose too much performance here may be a burden largely if not entirely for the the application and it’s data organization as opposed to the system.
TraceRayInline control flow
The image below depicts what happens when a shader uses a RayQuery object to call RayQuery::TraceRayInline() and related methods for performing inline raytracing. It offers similar functionality to the full dynamic-shader-based TraceRay() control flow, except refactored to make more sense when driven from a single shader. The orange boxes represent fixed function operations while the blue boxes represent cases where control has returned to the originating shader to drive what happens next, if anything. In each of these states of shader control, the shader can choose to further interact with the RayQuery object via a subset of RayQuery intrinsics currently valid based on the current state.
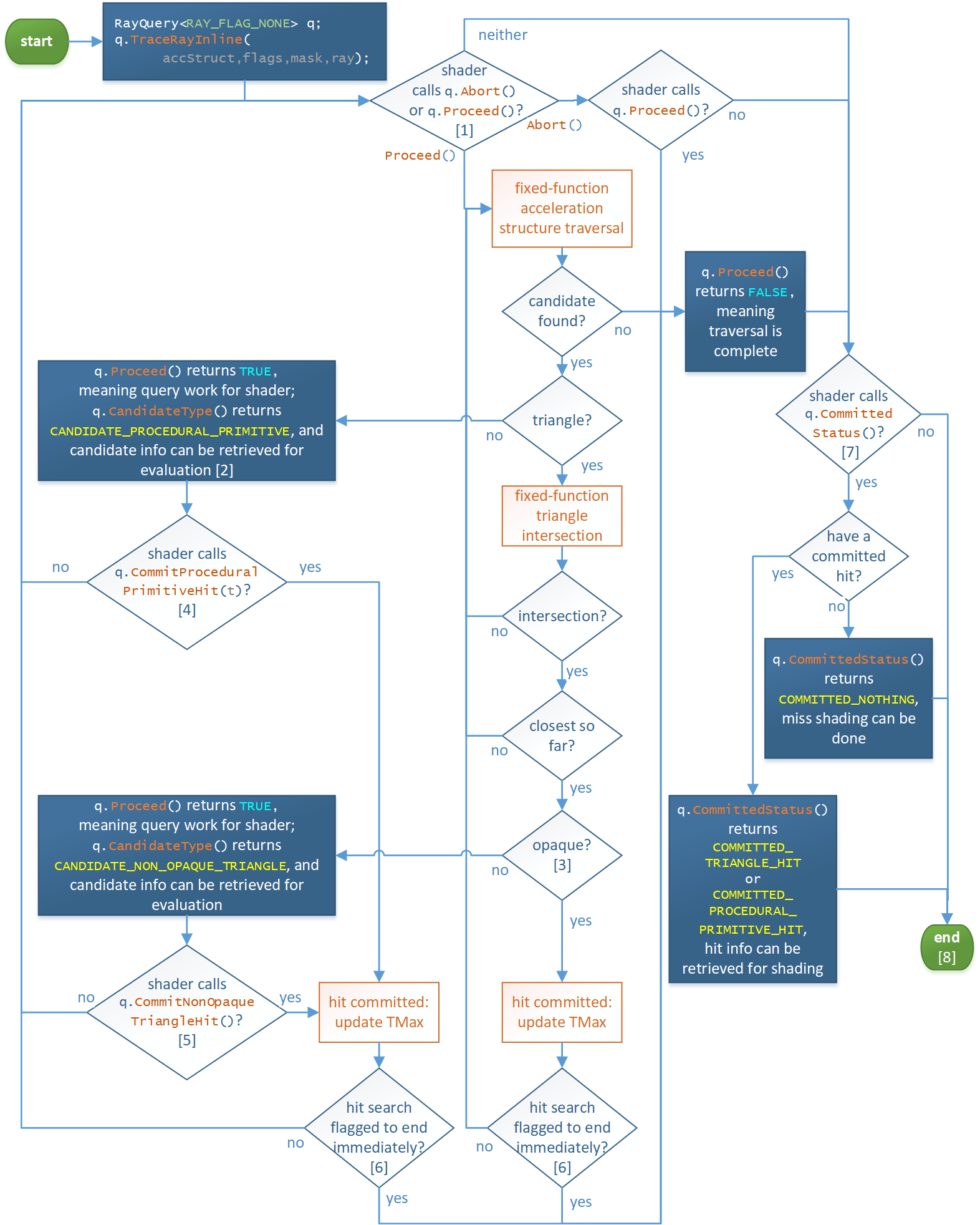
[1] RayQuery::Proceed() searches the acceleration structure to enumerate
primitives that may intersect the ray, conservatively: If a primitive is
intersected by the ray and is within the current ray extents
interval, it is guaranteed to be enumerated eventually. If a primitive
is not intersected by the ray or is outside the current ray extents, it may or may not be enumerated. Note that TMax is updated
when a hit is committed (internal to the traversal, not visible to the application). RayQuery::Proceed() represents where the bulk of system acceleration structure traversal is implemented (including code inlining where applicable). RayQuery::Abort() is an optional shortcut for the shader to be able to cause traversal to appear to be complete, via RayQuery::Proceed() returning FALSE. So it is just a convenient way to exit the shader’s traversal loop. A shader can instead choose to break out of its traversal logic manually as well with normal shader code branching (invisible to the system). This works since, as discussed in [5], the shader can call RayQuery::CommittedStatus() and related methods for retrieving committed hit information at any time after a RayQuery::TraceRayInline call.
[2] Consider the case where the geometry is not triangle based. Instead of fixed function triangle intersection RayQuery::Proceed() returns control to the shader. It is the responsibility of the shader to evaluate all procedural intersections for this acceleration structure node, including resolving transparency for them if necessary without the system seeing what’s happening. The net result in terms of traversal is to callRayQuery::CommitProceduralPrimitiveHit() at most once if the shader finds an opaque hit that is closest so far.
[3] Opaqueness is determined by examining the geometry and instance flags of the intersection as well as the selection of ray flags (template parameter and dynamic flags OR’d together).
[4] While in CANDIDATE_PROCEDURAL_PRIMITIVE state it is ok to call RayQuery::CommitProceduralPrimitiveHit() zero or more times for a given candidate, as long as each time called, the shader has manually ensured that the latest hit being committed is within the current ray extents. The system does not do this work for procedural primitives. So new committed hits will update TMax multiple times as they are encountered. For simplicity, the flow diagram doesn’t visually depict the situation of multiple commits per candidate. Alternatively the shader could enumerate all procedural hits for the current candidate and just call CommitProceduralPrimitiveHit() once for the closest hit found that the shader has calculated will be the new TMax.
[5] While in CANDIDATE_NON_OPAQUE_TRIANGLE state, the system has already determined that the candidate would be the closest hit so far in the ray extents (e.g. would be new TMax if committed). It is ok for the shader to call RayQuery::CommitNonOpaqueTriangleHit() zero or more times for a given candidate. If called more than once, subsequent calls simply have not effect as the hit has already been committed. For simplicity, the flow diagram doesn’t visually depict the situation of multiple commits per candidate.
[6] The search for hits is ended at this point if the
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH ray flag is set.
[7] The shader can call RayQuery::CommittedStatus() from anywhere - a careful look at the flow diagram will reveal this. It doesn’t have to be after traversal has completed. The status (including values returned from methods that report commited values) simply reflect the current state of the query. What is not depicted in the diagram is that if RayQuery::CommittedStatus() is called before traversal has completed, the shader can still continue with the ray query. One scenario where it can be interesting to call RayQuery::CommittedStatus() before RayQuery::Proceed() has returned false is if the shader has chosen to manually break out of its traversal loop without calling RayQuery::Abort() discussed in [1].
[8] The endpoint of the graph is trivially reachable anytime the shader has control simply by not calling methods that advance RayQuery state. The shader can arbitrarily choose to stop using the RayQuery object, or do final shading based on whatever the current state of the RayQuery object is. The shader can even reset the query regardless of its current state at any time by calling RayQuery::TraceRayInline() again to initialize a new trace.
Specialized TraceRayInline control flow
The image below depicts how a particular choice of template flags used with the initial declaration of RayQuery can prune down the full flow graph (depicted above). There is no shader participation needed in the search for intersections here. Further, the search is configured to end upon the first hit. Simplifications like this can free the system to generate more performant inline raytracing code.
Shader Execution Reordering
Motivation:
Many raytracing workloads suffer from divergent shader execution and divergent data access because of their stochastic nature. Improving coherence with high-level application-side logic has many drawbacks, both in terms of achievable performance (compared to a hardware-assisted implementation) and developer effort. The DXR API already allows implementations to dynamically schedule shading work triggered by TraceRay and CallShader`, but does not offer a way for the application to control that scheduling in any way.
Furthermore, the current fused nature of
TraceRaywith its combined execution of traversal, intersection testing, anyhit shading and closesthit or miss shading imposes various restrictions on the programming model that, again, can increase the amount of developer effort and decrease performance. One aspect is that common code, e.g., vertex fetch and interpolation, must be duplicated in all closesthit shaders. This can cause more code to be generated, which is particularly problematic in a divergent execution environment. Furthermore,TraceRay’s nature requires that simple visibility rays unnecessarily execute hit shaders in order to access basic information about the hit which must be transferred back to the caller through the payload.
Shader Execution Reordering (SER) introduces a new HLSL built-in intrinsic, MaybeReorderThread, that enables application-controlled reordering of work across the GPU for improved execution and data coherence. Additionally, the introduction of HitObject allows separation of traversal, anyhit shading and intersection testing from closesthit and miss shading.
HitObject and MaybeReorderThread can be combined to improve coherence for
closesthit and miss shader execution in a controlled manner.
Applications can control coherence based on hit properties,
ray generation state, ray payload, or any combination thereof. Applications can
maximize performance by considering coherence for both hit and miss shading as
well as subsequent control flow and data access patterns inside the
raygeneration shader.
HitObject improves the flexibility of the ray tracing pipeline in general.
First, common code, such as vertex fetch and interpolation, must no longer be
duplicated in all closesthit shaders. Common code can simply be part of the
raygeneration shader and execute before closesthit shading. Second, simple
visibility rays no longer have to invoke hit shaders in order to access basic
information about the hit, such as the distance to the closest hit. Finally,
HitObject can be constructed from a RayQuery, which enables
MaybeReorderThread and shader table-based closesthit and miss shading to be combined with
RayQuery.
This feature should be relatively straightforward to adopt by
current DXR implementations: HitObject merely decouples existing TraceRay
functionality into two distinct stages: the traversal stage and the shading
stage. For SER’s MaybeReorderThread, the minimal allowed implementation is simply a
no-op, while implementations that already employ more sophisticated scheduling
strategies are likely able to reuse existing mechanisms to implement support
for SER. No DXR runtime changes are necessary, since the addition to the programming model is limited to HLSL and DXIL.
This feature is a required part of Shader Model 6.9 for devices with raytracing support. It is also a required part of D3D12_RAYTRACING_TIER_1_2, though even if a device doesn’t support this tier it must still must support SER if it supports Shader Model 6.9.
Note that all new SER types and intrinsics are added to namespace dx in
accordance with the Fast-Track Process for HLSL
Extensions.
For the sake of legibility, this document only qualifies the namespace
explicitly in the definition of HitObject and its members. An implicit using namespace dx is assumed
elsewhere, such as code examples.
The canonical use of the features in SER features involve changing a TraceRay call to the
following sequence that is functionally equivalent:
HitObject Hit = HitObject::TraceRay( ..., Payload );
MaybeReorderThread( Hit );
HitObject::Invoke( Hit, Payload );
This snippet traces a ray and stores the result of traversal, intersection
testing and anyhit shading in Hit. The call to MaybeReorderThread improves
coherence based on the information inside the Hit. Closesthit or miss
shading is then invoked in a more coherent context.
Note that this is a very basic example. Among other things, it is possible to query information about the hit to influence MaybeReorderThread with additional hints. See Separation of MaybeReorderThread and HitObject::Invoke for more elaborate examples.
TraceRay returning a HitObject can be called on its own as well without
calling MaybeReorderThread or Invoke. The caller might just want a HitObject
without caring about thread reordering or Closesthit or miss shading.
This is discussed in SER Device Support, in particular
the implication, given that SER is required as part of Shader Model 6.9 for
raytracing capable devices: Even devices that only trivially support SER
by doing nothing on MaybeReorderThread must also support Invoke not being called,
essentially a new capability to skip final shading not available before.
See HitObject and MaybeReorderThread for the rest of the documentation of this feature.
SER Device Support
Devices that support Shader Model 6.9 and raytracing must support the Shader Execution Reordering HLSL methods in this spec. This doesn’t mean all devices must support performing thread reordering - it is valid for an implementation to do nothing there. Applications write one codebase using SER, and devices that can take advantage will, and other devices will just behave as if no reordering happened.
To help applications understand if the device actually does reordering,
D3D12 exposes a device capability indicating it that can be queried via
CheckFeatureSupport():
typedef struct D3D12_FEATURE_DATA_D3D12_OPTIONS22
{
_Out_ BOOL ShaderExecutionReorderingActuallyReorders;
...
} D3D12_FEATURE_DATA_D3D12_OPTIONS22;
e.g.:
D3D12_FEATURE_DATA_D3D12_OPTIONS22 Options;
VERIFY_SUCCEEDED(pDevice->CheckFeatureSupport(
D3D12_FEATURE_D3D12_OPTIONSNN, &Options, sizeof(Options)));
if (!Options.ShaderExecutionReorderingActuallyReorders) {
// Maybe app wants to do it's own manual sorting.
// Or maybe a developer just wants to double check what's happening
// on a given device during development.
}
Even on devices that don’t do reordering, the HitObject portion of SER can be useful.
For instance, suppose an app wants to trace a ray, potentially including AnyHit
shader invocations, and just wants the final T value without running
the ClosestHit shader (even if it happens to exist in the HitGroup).
The app can call TraceRay returning a HitObject, call
HitObject::GetRayTCurrent on the HitObject to get the T value and be done.
Not calling HitObject::Invoke, skips ClosestHit/Miss invocation, and this
works on any device with Shader Model 6.9 support.
The app might still want to call MaybeReorderThread() after TraceRay()
if the subsequent work could benefit, as illustrated in the Unified
Shading example above. And devices that can’t reorder would just
ignore the MaybeReorderThread() call.
Opacity micromaps
Very high quality, high-definition opacity (alpha) content is usually very coherent, or locally similar.
Typically, there are larger regions that are completely transparent or opaque within meshes that do not necessarily coincide with triangle boundaries.
Furthermore, in DXR Tier 1.1, the opaque/non-opaque properties of triangles are geometry-wide, but it might be impractical to split up meshes into several geometry pieces. As a consequence, any-hit shaders are often invoked for ray-triangle hits that could be trivially categorized as a miss or a hit.
To reduce the overhead of redundant and potentially expensive any-hit shaders, Opacity Micromaps (OMM) are added to triangle primitives with DXR Tier 1.2 (D3D12_RAYTRACING_TIER_1_2).
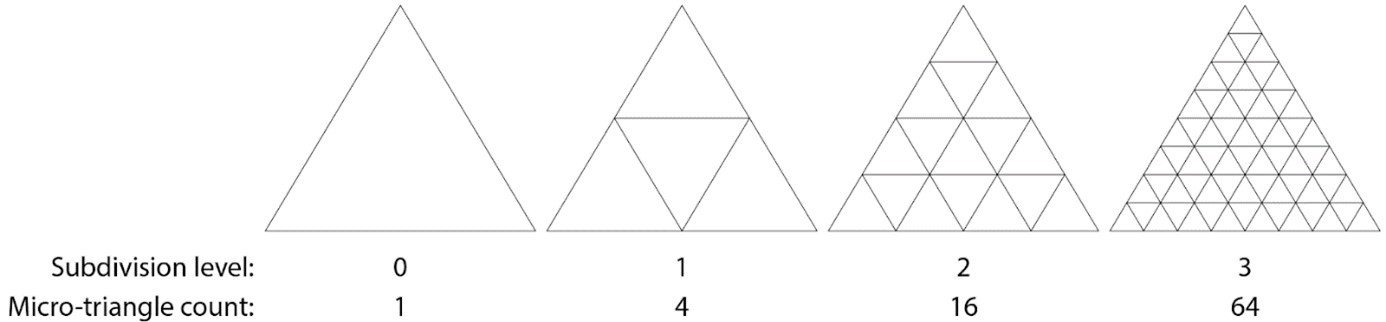
The opacity micromap is defined on a sub-triangle detail level, encoded in a uniformly subdivided mesh of 4N micro-triangles, laid out on a 2N × 2N barycentric grid.
Here is a diagram of the first few levels of the subdivision scheme:
Briefly, OMMs can be used to cull any-hit shading invocations in regions within a triangle known to be completely opaque or transparent. It is also possible to bypass any-hit shading completely, and use the mask as high frequency geometric detail on the triangle. Individual OMMs store (compact) information about how to modulate a base triangle to add the extra detail, much like traditional texture mapping.
Here is an example of OMM detail applied to a base triangle:

Some more operational details follow. In addition, see Opacity Micromap related API and HLSL impacts for a links to how the features integrates into the programming model overall.
Opacity micromap construction
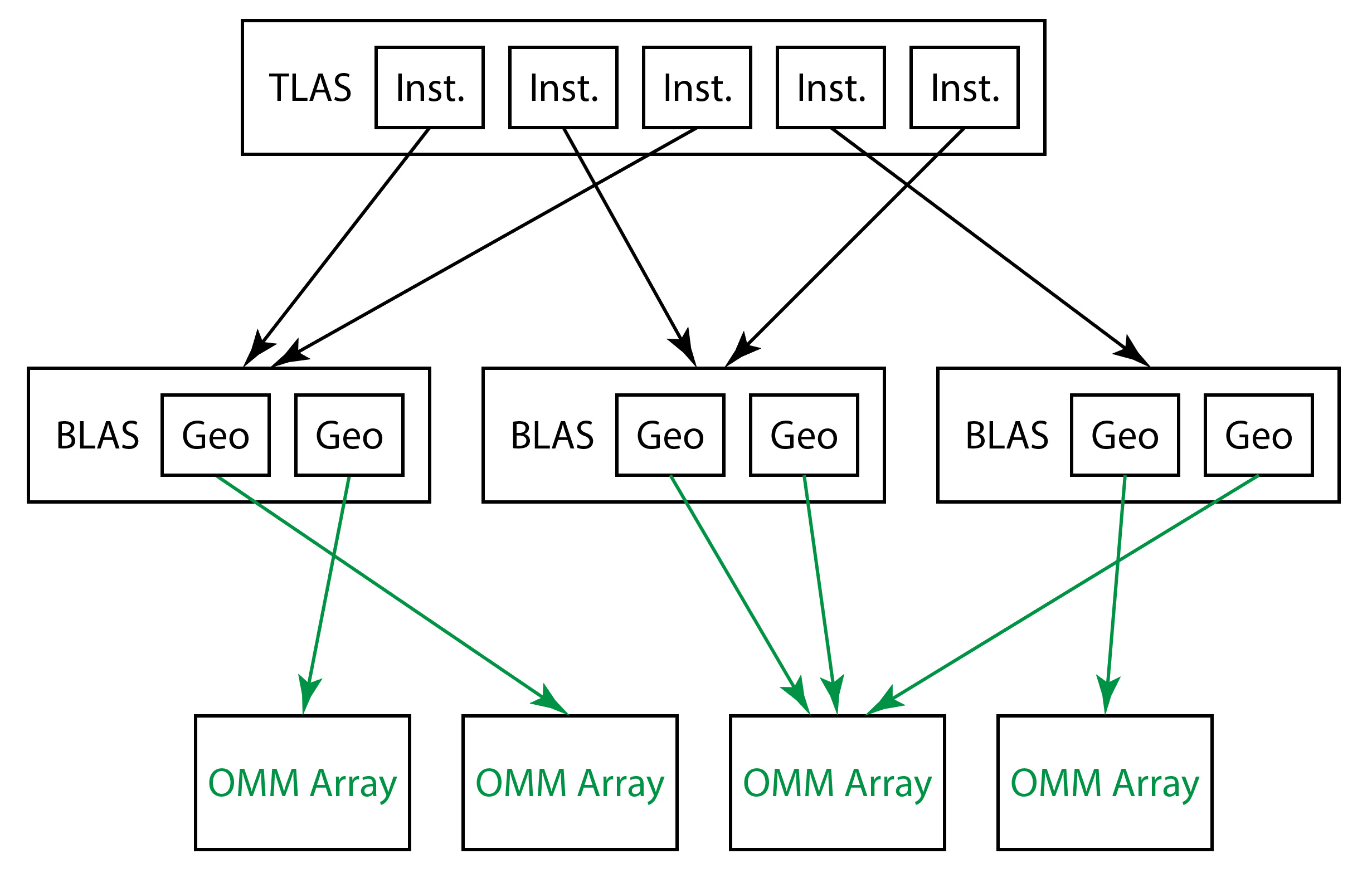
Unlike triangles, the OMMs are not stored directly in the bottom-level acceleration structures (BLAS), but instead reside in separate resources. Individual OMMs may be referenced by triangles from within a BLAS. Because OMMs storage is separate from the BLASes, they can be reused within and across multiple BLASes in a scene.
Before OMMs can be used with raytracing, they must be processed by the driver. This is similar to how triangles and procedural primitives must be encoded into a BLAS before they can be used.
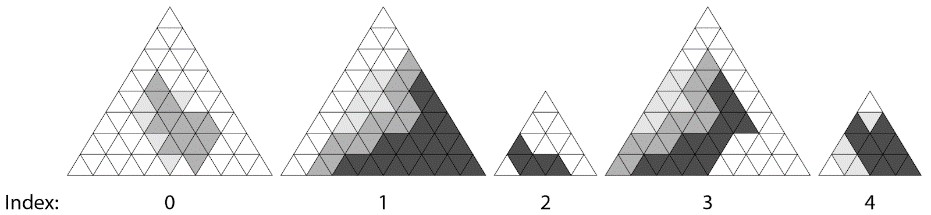
Collections of OMM inputs are used to construct OMM Arrays using the same API as for building acceleration structures: BuildRaytracingAccelerationStructure() on the command list. Here is an example of a collection of OMMs in an OMM Array:
Like acceleration structures, the OMM Arrays are opaque data structures, but the application is responsible for memory management. The amount of memory required for an OMM Array can be queried via the same method used for acceleration structures: GetRaytracingAccelerationStructurePrebuildInfo() device member function. Opaque OMM Array data must reside in resources that are permanently in the state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE, just like acceleration structures. It is fine to intermix acceleration structures and OMM array data in the same allocations.
The application can reference specific entries within an array by their input-order index to link specific entries to specific triangles in a BLAS. To construct an OMM Array, the application provides an input buffer with micro-triangles in one of the supported encodings, which the driver assembles into a raytracing-compatible format.
The application can link an OMM Array per geometry, from which detailed opacity information is retrieved during ray traversal. This is illustrated in the diagram below. The OMM feature is accessible for BLAS builds through the use of a new geometry descriptor, D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC, which contains additional inputs to the BuildRaytracingAccelerationStructure() function.
If an OMM Array is overwritten with new OMM data, any BLASes referencing it become stale and must be updated. It is also possible to assign a different OMM Array and OMM indices when updating a BLAS. The new AS build flag D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE lets the driver know that OMM contents may change with BLAS updates.
OMM Arrays can be copied around, serialized/deserialized etc. just like acceleration structures via the various modes of CopyRaytracingAccelerationStructure().
Some information about OMM Arrays is only available once it has been built. This includes the final size of the resource (which may be somewhat smaller than what is reported by the GetRaytracingAccelerationStructurePrebuildInfo() call), and the sizes of the serialized and visualization versions of the Array. The information can either be retrieved from the OMM Array build call, or by calling EmitRaytracingAccelerationStructurePostbuildInfo().
Opacity micromaps and TraceRay
A new pipeline flag, D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS, has been added to let the driver know that the opacity micromap feature is going to be used.
- If OMMs are known not to be used, it is more efficient to not specify the D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS flag.
- If the flag is omitted and an OMM is encountered during ray traversal, behavior is undefined.
Opacity micromaps classify micro-triangles as opaque, transparent or unknown. When a ray intersects a triangle with a linked OMM, the intersection point within the barycentric space of the triangle is used to look up the opacity at that location.
- If it is opaque, then the hit is committed.
- If it is transparent the hit is ignored and traversal resumes.
- If it is unknown, the attached any hit shader is invoked.
The additions to TraceRay() are depicted in this diagram:
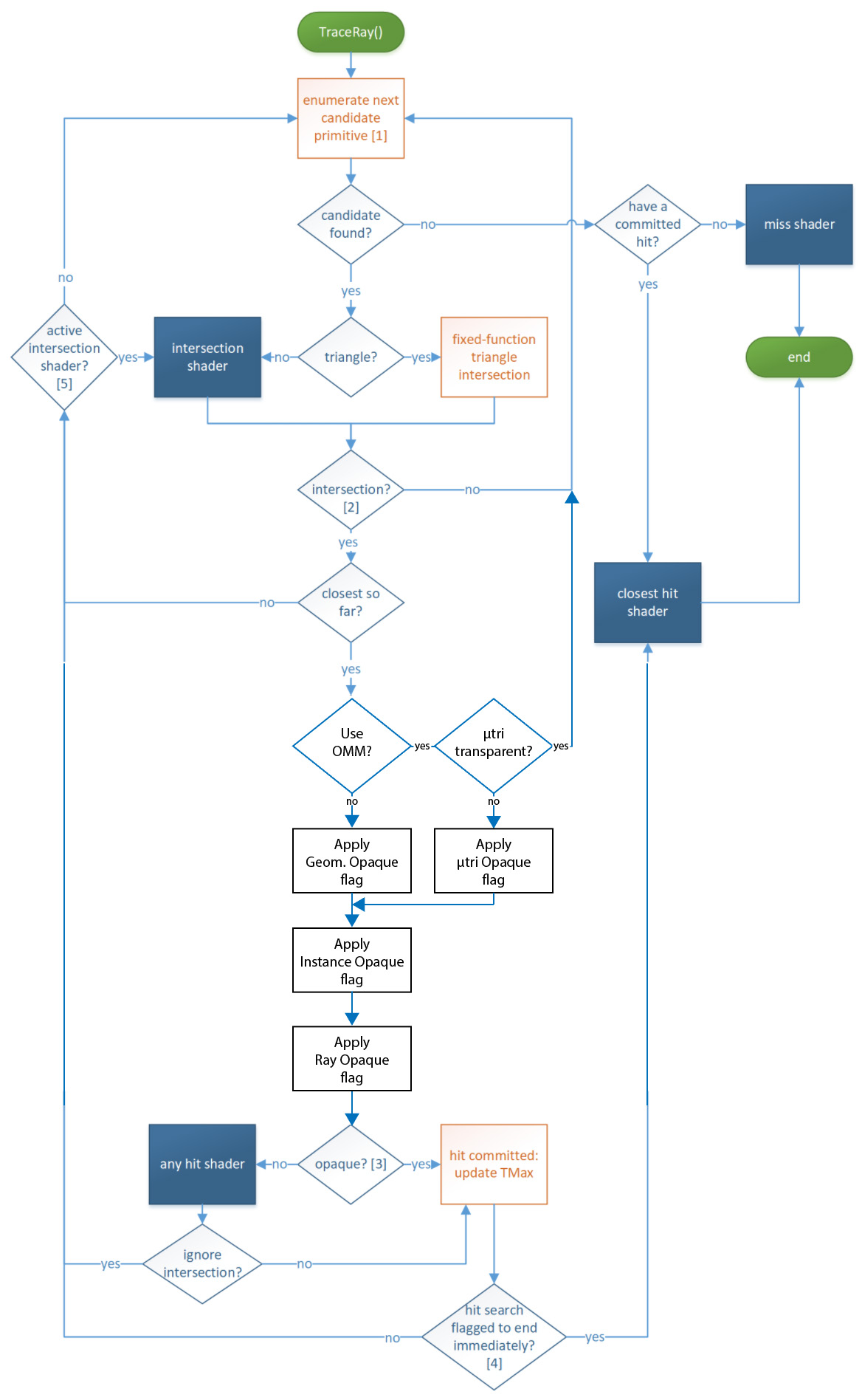
The geometry opaque/non-opaque flag state is ignored for triangles which have linked OMMs (that aren’t disabled via flags), as OMMs give much more fine-grained control and are intended to replace the geometry-wide state where possible.
Ray flags and instance flags may still alter the state of opaque or unknown hits, but note that any such flags are only applied after the OMM hit classification has occurred. This means that once the OMM has been evaluated, there is no way to turn a transparent micro-triangle miss into a hit even by using force-opaque ray or instance flags.
It is still possible to turn off OMMs and revert to the geometry-specified behavior for individual instances using the D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS instance flag. This flag is only valid if the referenced BLAS was originally built with the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS build flag.
Disabling OMMs on a per-instance basis is useful to implement certain level-of-detail schemes.
Opacity micromaps and TraceRayInline
For inline raytracing via RayQuery objects, the RayQuery object takes an additional template parameter (as of Shader Model 6.9) allowing each instance of the object to indicate that the opacity micromap feature is going to be used.
RayQuery<RAY_FLAGS,RAYQUERY_FLAGS>
See RayQuery flags, which has a RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPS flag.
- If OMMs are known not to be used, it is more efficient to not specify the
RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPSflag. - If the flag is omitted and an OMM is encountered during ray traversal, behavior is undefined.
Opacity micromaps classify micro-triangles as opaque, transparent or unknown. When a ray intersects a triangle with a a linked OMM, the intersection point within the barycentric space of the triangle is used to look up the opacity at that location.
- If it is opaque, then the hit is committed.
- If it is transparent the hit is ignored and traversal resumes.
- If it is unknown, a candidate hit is returned.
The geometry opaque/non-opaque flag state is ignored for triangles which have linked OMMs, as OMMs give much more fine-grained control and are intended to replace the geometry-wide state where possible.
Ray flags and instance flags may still alter the state of opaque hits, but note that any such flags are only applied after the OMM hit classification has occurred. This means that once the OMM has been evaluated, there is no way to turn a transparent micro-triangle miss into a hit even by using force-opaque ray or instance flags.
It is still possible to turn off OMMs and revert to the geometry-specified behavior for individual instances using the D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS instance flag. This flag is only valid if the referenced BLAS was originally built with the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS build flag.
Disabling OMMs on a per-instance basis is useful to implement certain level-of-detail schemes.
Opacity micromap encoding
Opacity micromaps are bit masks of one or two bits per micro-triangle.
A 1-bit OMM marks each corresponding micro-triangle as either opaque (D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_OPAQUE) or transparent (D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_TRANSPARENT) and never requires any-hit shader intervention during the tracing of a ray.
2-bit OMMs are used if there are portions of the opacity that need to be resolved in an any-hit shader. A third translucent or “unknown” micro-triangle state is used for this purpose. The 2-bit OMM encodes four states (instead of only three) which affords some flexibility of interpretation: in some ray-traced effects, exact resolution is not required. For example, soft shadows may be resolved using a lower resolution proxy.
To facilitate use of such proxies the four states of a 2-bit OMM are transparent, opaque, unknown transparent (D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_TRANSPARENT), and unknown opaque (D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_OPAQUE).
In one mode of interpretation, unknown transparent is associated with transparent, and unknown opaque with opaque, and in doing so interpreting it as a 1-bit map without unknown states. This is referred to as operating in 2-state mode.
In a second mode of interpretation of the four states, the any-hit shader is invoked when the micro-triangle that is struck is categorized as either of the unknowns. This is referred to as operating in 4-state mode.
OMMs can be constructed with either 2 or 4 states (D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_2_STATE or D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_4_STATE).
4-state OMMs can operate in a 2-state interpretation mode through ray and instance flags, RAY_FLAG_FORCE_OMM_2_STATE or D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OMM_2_STATE.
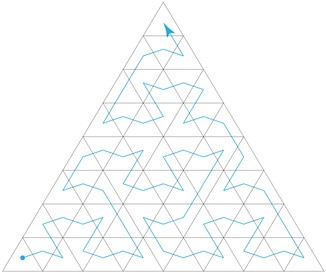
The OMM micro-triangle states are organized along a space-filling curve in barycentric space, depicted here:
Opacity micromap related API and HLSL impacts
Device methods extended to support Opacity Micromaps:
- GetRaytracingAccelerationStructurePrebuildInfo()
- added support for prebuild info for acceleration structures using OMMs
- added support for prebuild info for OMM arrays themselves
- for details see additions to
BuildRaytracingAccelerationStructurebelow which are shared for prebuild info here
- CreateStateObject()
- added
D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPSin D3D12_RAYTRACING_PIPELINE_FLAG - added
RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPSin a new RayQuery flags template parameter to RayQuery
- added
- CheckDriverMatchingIdentifier()
- added
D3D12_SERIALIZED_DATA_RAYTRACING_OPACITY_MICROMAP_ARRAYin D3D12_SERIALIZED_DATA_TYPE
- added
CommandList methods extended to support Opacity Micromaps:
- BuildRaytracingAccelerationStructure()
- Additions for using Opacity Micromap arrays in bottom level acceleration structures:
- In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS:
- Added behavior to existing flag
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PERFORM_UPDATE - Added
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATEandD3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS
- Added behavior to existing flag
- In D3D12_RAYTRACING_GEOMETRY_DESC added D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC to union
- Added
D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLESto D3D12_RAYTRACING_GEOMETRY_TYPE to indicate above desc - In D3D12_RAYTRACING_INSTANCE_FLAGS:
- Added
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OMM_2_STATEandD3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS
- Added
- In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS:
- Added support for building Opacity Micromap arrays themselves:
- D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS has a new entry in its typed union: D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC
*pOpacityMicromapArrayDesc. There is a corresponding new D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPED3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_OPACITY_MICROMAP_ARRAY.
- D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS has a new entry in its typed union: D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC
- Additions for using Opacity Micromap arrays in bottom level acceleration structures:
- EmitRaytracingAccelerationStructurePostbuildInfo()
- D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC defines a new serialization header D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1 that is a superset and backwards compatible with the existing header, D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER. With the new header, BLAS can refer to serialized Opacity Micromaps, where before there was nothing they could refer to. Apps that serialized with the previous header continue to work fine, as it results in the same memory layout for cases where there is nothing after the header (since there were no OMMs before).
- CopyRaytracingAccelerationStructure()
- OMM Arrays support existing
COPY_MODE_CLONE,COPY_MODE_COMPACT,_VISUALIZATION_DECODE_FOR_TOOLS,_SERIALIZEand_DESERIALIZE. - As described above for EmitRaytracingAccelerationStructurePostbuildInfo(), when doing serialization/deserialization the header for BLAS now supports specifying serialized Opacity Micromaps (which are themselves serialized/deserialized separately)
- OMM Arrays support existing
There are a couple of header Constants related to Opacity Micromaps as well.
For HLSL there is one new Ray flag related to Opacity Micromaps. There is also an equivalent flag in a new RayQuery flags template parameter for inline raytracing RayQuery objects.
Enum representing entries in Opacity Micromaps (not an API, just defining the data interpretation): D3D12_RAYTRACING_OPACITY_MICROMAP_STATE.
Shader management
Problem space
Implementations juggle many shaders
In a given DispatchRays() invocation from a CommandList, the application must have a way to specify every shader that might be invoked, since rays can go anywhere. It would seem this is solved by the presence of shader tables that allow applications to arbitrarily select shaders and their root arguments.
However, implementations have the potential to run the arbitrary set of shaders more efficiently if they also get a chance to see the full set up front (before execution). So the design choice is to give implementations the ability to perform a quick link step. This link doesn’t recompile the individual shaders but instead makes some scheduling decisions based on the characteristics of all of the shaders in the potentially referenced set. Where applications have freedom is to reference any of the shaders in a given pre-identified set from anywhere in shader tables.
Sets of shaders need to be pre-defined because it isn’t viable to require drivers to inspect shader tables in order to figure out what the reachable set for a given DispatchRays() call. Shader tables can be modified freely by the application (with appropriate state barriers), after all, on the GPU timeline. The expectation is that any analysis of the set of shaders for the purpose of scheduling optimization for the group is best left as a CPU task for the driver.
This motivates the need to make some representation of all shaders reachable by a raytracing operation on the CPU timeline.
Applications control shader compilation
Applications must control when and where (on which threads) shader compilation occurs given the high CPU cost, particularly with large asset bases.
First there is the initial shader compile to DXIL binary, which can be done offline by an application (before any hardware driver sees it). The HLSL compiler supports DXIL libraries, allowing applications to easily store large compiled codebases in single files if desired.
Given shaders in one or more DXIL libraries, they must be submitted to drivers to compile on any given system where the shaders will run. Applications must be able to choose which subset of any given DXIL library a driver should compile at any given time; applications have the freedom to choose how to distribute driver shader compilation across threads, regardless of how groups of shaders happen to be packaged into DXIL libraries.
State objects
A state object represents a variable amount of configuration state, including shaders, that an application manages as a single unit and which is given to a driver atomically to process (e.g. compile/optimize) however it sees fit. A state object is created via CreateStateObject() on a D3D12 device.
Subobjects
State objects are built out of subobjects. A subobject has a
type and corresponding data. A couple of
examples of subobject types:
D3D12_STATE_SUBOBJECT_TYPE_DXIL_LIBRARY and
D3D12_STATE_SUBOBJECT_TYPE_LOCAL_ROOT_SIGNATURE*.
Another notable subobject type is
D3D12_STATE_SUBOBJECT_TYPE_SUBOBJECT_TO_EXPORTS_ASSOCIATION,
whose role is to associate another subobject with a list of DXIL
exports. This enables, for example, multiple local root signatures to be
present in a state object simultaneously, each associated with different
shader exports. See Subobject association behavior for detailed discussion, and
see the relevant parts of the state object API here:
D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION and
D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION.
The full set of subobject types is defined in D3D12_STATE_SUBOBJECT_TYPE.
Subobjects in DXIL libraries
DXIL libraries, compiled offline before state object creation, can also define many of the same kinds of subobjects that can be directly defined in state objects. The DXIL/HLSL versions of subobjects are defined here.
The reason that subobjects can be defined either in DXIL libraries or in state objects is to give the application the choice about how much state authoring to do offline (DXIL libraries) vs at runtime (state objects).
Shaders are not considered a subobject, so while they are present in DXIL libraries, they can’t be directly passed into state objects. Instead, the way to get shaders into a state object is to put the containing DXIL library into the state object, as a DXIL library subobject, including the requested shader entrypoint names to include.
State object types
State objects have a type that dictates rules about the subobjects they contain and how the state objects can be used.
Raytracing pipeline state object
One of the state object types is
D3D12_STATE_OBJECT_TYPE_RAYTRACING_PIPELINE, or
raytracing pipeline state object - RTPSO for short. An RTPSO
represents a full set of shaders that could be reachable by a
DispatchRays call, with all configuration options resolved,
such as local root signatures and other state.
An RTPSO can be thought of as an executable state object.
The input to SetPipelineState1() is a state object, where an RTPSO can be bound to the command list.
Graphics and compute state objects
In the future, graphics and compute pipelines could be defined in state object form for completeness. Initially the focus is on enabling raytracing. So for now the way graphics and compute PSOs are constructed is not changed.
Collection state object
Another state object type is
D3D12_STATE_OBJECT_TYPE_COLLECTION, or collection for short. A
collection can contain any amount of subobjects, but doesn’t have
constraints. Not all dependencies the included subobjects have must be
resolved in the same collection. Even if dependencies are locally
defined, the set of subobjects doesn’t have to be the complete set of
state that will eventually be used on the GPU. For instance, a
collection may not include all shaders needed to raytrace a scene,
though it could.
The purpose of a collection is to allow an application to pass an arbitrarily large or small collection of state to drivers to compile at once (e.g. on a given thread).
If too little configuration information is provided in the subobjects in
a collection, the driver cannot compile anything,
and would be left with simply storing the subobjects. This situation isn’t allowed by
default: collection creation will fail. The collection can opt out of needing all
dependencies to be resolvable, causing the driver to defer compilation, by setting the D3D12_STATE_OBJECT_FLAG_ALLOW_LOCAL_DEPENDENCIES_ON_EXTERNAL_DEFINITONS flag in D3D12_STATE_OBJECT_FLAGS.
A collection must meet the following requirements for the driver to be able to compile it immediately:
- library functions called by shaders must have code definitions
- resource bindings referenced by shaders must have local and/or global root signature subobjects defining the bindings
- raytracing shaders must have a D3D12_RAYTRACING_SHADER_CONFIG and a D3D12_RAYTRACING_PIPELINE_CONFIG subobject
The parts of the above list that involve subobject associations are discussed further at subobject association requirements.
For simplicity, collections can’t be made out of other collections. Only executable state objects (e.g. RTPSOs) can take existing collections as a part of their definition.
State object lifetimes as seen by driver is a discussion useful for driver authors.
Collections vs libraries
A collection is a bit like a library, but a different name is used to distinguish it from DXIL Libraries.
DXIL Libraries are hardware agnostic. In contrast, a collection’s contents are given to a driver to process and can include a part of a DXIL Library (by listing a subset of exports to use), multiple DXIL Libraries, as well as other types of subobjects like root signatures.
An application can choose to have many tiny DXIL libraries each with a single compileable raytracing shader. It can choose to create a separate collection for each one across different threads on a CPU. Or it could make one collection per thread, distributing the set of shaders evenly across them. In either case, an RTPSO can then be constructed out of the set of collections.
Alternatively, if CPU time compiling shaders in the driver before use isn’t a concern, an application can skip making collections and pass all of its DXIL Libraries directly into the creation of an RTPSO. An extreme case of this would be an application baking all of its shader assets (and other necessary subobjects like root signatures) in a single DXIL Library (e.g. one binary file), loading this into memory and passing it directly into the creation of an RTPSO. The driver would have to compile all of the shaders at once on one thread.
DXIL libraries and state objects example

Subobject association behavior
The introduction to Subobjects called out a specific type of subobject that associates another subobject with a set of shader exports.
This section describes how subobjects (like root signatures) get associated with shaders in DXIL libraries and state objects. This includes the way default associations (intended for convenience) and explicit association work. Also covered is how DXIL subobject associations can be overridden when an app includes a DXIL library in a state object.
Default associations
Default associations serve as a convenience for the common case where a given subobject (like a root signature) will be used with many shaders.
Terminology
For the subsequent discussion consider the following scopes of visibility where a set of shaders can be found:
-
a given DXIL library
-
a collection state object, which may get shaders from one or more DXIL libraries
-
an executable state object (e.g. RTPSO), which may get shaders from one or more collections and/or DXIL libraries
A given scope can contain other inner scopes, or outer scopes can enclose it.
Declaring a default association
There are two ways declare a default association for a subobject to a set of shaders:
-
Declare a subobject in a given scope with no explicit associations in that scope that reference it. If this subobject is involved in an association defined in any other scope including enclosing or contained scopes, it doesn’t affect that locally this subobject acts as a default association.
-
Define an association with an empty export list. The subobject specified may or may not be in the current scope. The subobject specified can also be unresolved (not defined in current, containing or enclosed scopes), unless the state object being defined is executable, e.g. RTPSO.
Behavior of a default association
In a default association a subobject is associated with all candidate exports in the current and contained scopes, but not to enclosing scopes. Candidates to be associated are exports for which the association would make sense, and that don’t have an explicit association with another subobject of the same type already. There is one exception, where default association can override an existing association on an export, described later.
Explicit associations
Explicit associations associate a given subobject to a specific nonempty list of exports.
The subobject being associated (e.g. root signature) and/or the listed exports can be in any scope in the object.
In addition, neither the subobject being associated or the listed exports have to even be visible yet (may be unresolved references), unless the state object is executable, e.g. RTPSO.
Multiple associations of a subobject
A given subobject can be referenced in multiple association definitions, explicit and/or default. This way any given association definition doesn’t need to be all-knowing (does not need to be aware of all shaders a subobject may be relevant to).
The use of multiple association declarations also enables, for instance, broadcasting a default association for a given subobject to be broadcast into multiple scopes. Each association declaration (in a different scope) this case would use an empty export (making it a default association) but reference the same subobject.
Conflicting subobject associations
If there are multiple explicit subject associations (with different subobject definitions) that map to a given shader export, this is a conflict. If a conflict is discovered during DXIL library creation, library creation will fail. Otherwise if a conflict is discovered during state object creation, that fails.
The determination of conflicts doesn’t care what scope(s) hold the associations, subobjects being associated or shader export within a given state object (or single scope DXIL library). This is because by definition, explicit associations can reach anywhere in a state object (or DXIL library).
There is one exception where a conflict doesn’t cause a failure and instead there is a precedence order that causes an override:
Exception: overriding DXIL library associations
Subobject associations (default or explicit) declared directly in state objects that target an export in a directly included DXIL library cause any other association to that export that was defined in any DXIL library (same or other library) to no longer apply to that export. And as a result, the subobject association declared directly in the state object “wins” and overrides the DXIL based association. This includes associations defined at state object scope via either D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION (association at state object scope for a subobject also defined at state object scope) or D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION (association at state object scope a subject defined in a DXIL library).
Associations declared in state objects do not override any existing associations in contained collections (including DXIL libraries the contained collections may have).
The subobject being associated can be unresolved unless the state object is RTPSO (executable).
The reason overriding is only defined for DXIL libraries directly passed into a given state object’s creation is the following. Drivers never have to worry about compiling code that came from a DXIL library during state object creation only to have to recompile later because multiple subobject overrides happened. e.g. creating a collection that overrides associations in a DXIL library then creating an RTPSO that includes the collection and tries to override an association again is invalid (the second association becomes conflicting and state object creation fails).
The value in supporting overriding of subobject associations is to give programmatic code (i.e. performing state object creation) one chance to override what is in a static DXIL library, without having to patch the DXIL library itself.
Subobject associations for hit groups
Hit groups reference a set of component shaders, such as a closest hit shader, any hit shader, and/or intersection shader. Subobject associations (like associating a local root signature to a shader) can be made directly to the individual component shaders used by a hit group and/or directly to the hit group. Making the association to the hit group can be convenient, as it applies to all the component shaders (so they don’t need individual associations). If both a hit group has an association and its component shaders have associations, they must match. If a hit group doesn’t have a particular subobject association, the associations for all component shaders must match. So different component shaders can’t use different local root signatures, for instance.
Runtime resolves associations for driver
The runtime resolves what subobject associations ended up at any given export, accounting for defaults, overriding etc. and tells the driver the result during state object association. This ensures consistency across implementations.
Subobject association requirements
This table describes requirements for each subobject type that supports being associated with shader exports.
The “Match rule” column describes whether a subobject association is required or optional for any given shader and whether the definition of the subobject must match that of other shaders.
The “Match scope” column describes what set of shader code the matching requirement applies to.
| Subobject type | Match rule | Match scope |
|---|---|---|
| Raytracing shader config | Required & matching for all exports | Full state object. More discussion at D3D12_RAYTRACING_SHADER_CONFIG. |
| Raytracing pipeline config | Required & matching for all exports | Full state object. More discussion at D3D12_RAYTRACING_PIPELINE_CONFIG, D3D12_RAYTRACING_PIPELINE_CONFIG1. |
| Global root signature | Optional, if present must match shader entry | Call graph reachable from shader entry. More discussion at D3D12_GLOBAL_ROOT_SIGNATURE. |
| Local root signature | Optional, if present must match shader entry | Call graph reachable from shader entry (not including calls through shader tables). More discussion at D3D12_LOCAL_ROOT_SIGNATURE. |
| Node mask | Optional, if present match for all exports | Full state object. More discussion at D3D12_NODE_MASK. |
| State object config | Optional, if present match for all exports | Local state object only, doesn’t need to match contained state objects. More discussion at D3D12_STATE_OBJECT_CONFIG |
State object caching
Drivers are responsible for implementing caching of state objects using existing services in D3D12 to improve performance when state objects (or components in them) are reused across runs of an application.
Incremental additions to existing state objects
Tier 1.1 implementations support adding to existing state objects via AddToStateObject(). This incurs lower CPU overhead in streaming scenarios where new shaders need to be added to a state object that is already being used, rather than having to create a state object that is mostly redundant with an existing one. Details on the nuances of this option are described at AddToStateObject().
System limits and fixed function behaviors
Addressing calculations within shader tables
The very fixed nature of shader table indexing described here is a result of IHV limitation. The hope is these limitations aren’t too annoying for apps (which have to live with them). The extent to which the fixed function choices made here conflict with what an app actually wants may force app to do inefficient things like duplicating entries in shader tables to accomplish what they want. That said, such inefficiencies in shader table layout may not turn out to be an overall bottleneck. So this might be no worse than simply being slightly awkward to use.
Hit group table indexing
HitGroupRecordAddress =
D3D12_DISPATCH_RAYS_DESC.HitGroupTable.StartAddress + // from: DispatchRays()
D3D12_DISPATCH_RAYS_DESC.HitGroupTable.StrideInBytes * // from: DispatchRays()
(
RayContributionToHitGroupIndex + // from shader: TraceRay()
(MultiplierForGeometryContributionToHitGroupIndex * // from shader: TraceRay()
GeometryContributionToHitGroupIndex) + // system generated index of geometry in bottom-level acceleration structure (0,1,2,3..)
D3D12_RAYTRACING_INSTANCE_DESC.InstanceContributionToHitGroupIndex // from instance
)
Setting MultiplierForGeometryContributionToHitGroupIndex > 1 lets apps group shaders for multiple ray types adjacent to each other per-geometry in a shader table. The acceleration structure doesn’t need to know this is happening, as it merely stores an InstanceContributionToHitGroupIndex per-instance. GeometryContributionToHitGroupIndex is a fixed function sequential index (0,1,2,3..) incrementing per geometry, mirroring the order each geometry was placed by the app in the current bottom-level acceleration structure.
As of raytracing Tier 1.1 implementations, it can be interesting to set MultiplierForGeometryContributionToHitGroupIndex to 0, meaning geometry index does not contribute to shader table indexing at all. This can work if the shaders will be calling the GeometryIndex() intrinsic (added for Tier 1.1 implementations) to be able to distinguish geometries within shaders manually.
Miss shader table indexing
MissShaderRecordAddress =
D3D12_DISPATCH_RAYS_DESC.MissShaderTable.StartAddress + // from: DispatchRays()
D3D12_DISPATCH_RAYS_DESC.MissShaderTable.StrideInBytes * // from: DispatchRays()
MissShaderIndex // from shader: TraceRay()
Callable shader table indexing
CallableShaderRecordAddress =
D3D12_DISPATCH_RAYS_DESC.CallableShaderTable.StartAddress + // from: DispatchRays()
D3D12_DISPATCH_RAYS_DESC.CallableShaderTable.StrideInBytes * // from: DispatchRays()
ShaderIndex // from shader: CallShader()
Out of bounds shader table indexing
Behavior is undefined if shader tables are indexed out of range. The same applies to referencing a region within a shader table that is uninitialized or contains stale data.
Acceleration structure properties
Data rules
-
Once an acceleration structure has been built, it does not retain any references to inputs to the build, including vertex buffers etc. pointed to by the app’s acceleration structure description.
-
Acceleration structures are self-contained aside from top-level acceleration structures pointing to bottom-level acceleration structures.
-
Applications may not inspect the contents of an acceleration structure. Nothing stops a determined app from doing this, but the point is the data is implementation-dependent, undocumented and therefore useless for an app to inspect.
-
Once built, an acceleration structure is immutable with the exception of updates (incremental builds) done in-place.
-
A top-level acceleration structure must be rebuilt or updated before use whenever bottom-level acceleration structures it references are rebuilt or updated.
-
The valid operations on acceleration structures are the following:
-
input to TraceRay() and RayQuery::TraceRayInline() from a shader
-
input to BuildRaytracingAccelerationStructure():
-
as a bottom-level structure being referenced by a top-level acceleration structure build
-
as the source for an acceleration structure update (incremental build)
- source can be the same as destination address to mean an in-place update
-
input to CopyRaytracingAccelerationStructure(), which has various modes for doing things like acceleration structure compaction or simply cloning the data structure
- in particular, notice that copying acceleration structures in any other way is invalid
-
input to EmitRaytracingAccelerationStructurePostbuildInfo(), which reports information about an acceleration structure like how much space is needed for a compacted version.
-
-
Determinism based on fixed acceleration structure build input
Given a fixed world composed of triangles and AABBs, as well as identical shader code and data in the same order, multiple identical TraceRay() or RayQuery::TraceRayInline() calls produce identical results on the same device and driver. This requirement means that both the tracing of rays must be deterministic, and the acceleration structure must also be constructed such that it behaves deterministically.
Given the same triangle stream, AABB stream and any other configuration input to multiple acceleration structure builds (including the same instance and geometry transforms and other properties as applicable), the resulting acceleration structures’ behavior must be the same on a given device and driver. The actual acceleration structures’ contents may not be bit for bit identical, which could be revealed by a memory comparison. Matching acceleration structure data itself is of no value – they may contain internal pointers for instance that refer to differing addresses or data layout orderings without effect on behavior. So it is just the functional behavior of the consistently constructed acceleration structures that must match. The same intersections will be found in the same order with the same order of shader invocations, assuming application shaders and data that could affect execution flow also match.
For acceleration structure updates (incremental builds), multiple identical update sequences with matching sets of inputs to each update result in the same consistency of acceleration structure behavior described above.
Determinism based varying acceleration structure build input
Aside from the obvious fact that changing the locations and amount of geometry used to build an acceleration will affect its behavior, there are subtler variations that can affect acceleration structure function.
Acceleration structure intersection finding and intersection ordering behaviors may change as a result of varying of any of the following factors across acceleration structure builds:
-
vertex order (for triangles)
-
primitive order (for triangles)
-
AABB order
-
instance order in a top-level acceleration structure
-
geometry ordering in a bottom-level acceleration structure
-
flags to acceleration structure build (or instance / geometry flags)
-
acceleration structure update (incremental build) count and input history
-
device/driver
-
user defined values embedded in acceleration structures contributing to shader table indexing calculation or shader IDs. Implementations may find reason to, for instance, sort contents on these or somehow know which sets of content use the same values. Of course during an acceleration structure build the actual shader tables are not present, so the most an implementation could look at are the raw offset/ID values without trying to use them.
Acceleration structure intersection finding and intersection ordering behaviors do not change as a result of varying any of the following factors across acceleration structure builds:
-
memory addresses of acceleration structures or build inputs (aside from data ordering tolerances described above)
-
time
Preservation of triangle set
Implementations may not change the input set of triangles in an acceleration structure aside from the vertex order and primitive order. Merging, splitting, dropping triangles are not permitted.
Observable duplication of primitive in an acceleration structure is invalid. Observable meaning in any way that becomes visible during raytracing operations beyond just performance difference. Exceptions are:
-
Intersection shader invocation counts, which are allowed to be duplicated.
-
If an application has not set the flag
D3D12_RAYTRACING_GEOMETRY_FLAG_NO_DUPLICATE_ANYHIT_INVOCATIONin a given geometry, multiple any hit invocations may be observed for a given primitive for a given ray.
Barycentrics provided in the intersection attributes structure for a triangle intersection must be relative to the original vertex order, since the app has to be able to look up vertex attributes on its own.
AABB volume
Implementations may replace the AABBs provided as input to an acceleration structure build with more or fewer AABBs (or other representation), with the only guarantee that the locations in space enclosed by the input AABBs are included in the acceleration structure.
In particular, applications must not depend on the planes in the AABBs input to acceleration structure build having any kind of clipping effect on the shapes defined by enclosed intersection shader invocations. An implementation may have chosen some larger volume than the input AABB for which to invoke intersection shaders. While there is freedom for implementations here, excessive bloat of bounding volumes would incur extreme performance penalties from unnecessary intersection shader invocation. So the extent of bounding volume bloating should be limited in practice.
Inactive primitives and instances
Triangles are considered “inactive” (but legal input to acceleration structure build) if the x component of any vertex is NaN. Similarly AABBs are considered inactive if AABB.MinX is NaN. The geometries and/or their transforms in bottom level acceleration structures can be used as one way to inject these NaN values and deactivate entire instances/geometries. Instances with NULL bottom level acceleration structure pointers are also considered legal but inactive.
All inactive primitives/AABBs/bottom level acceleration structures are discarded during the acceleration structure build phase and can thus not be intersected during traversal.
Inactive primitives may not become active in subsequent acceleration structure updates – results are undefined if attempted. Conversely, primitives that were active at the initial build operation may not be changed to inactive (and thus can’t be discarded) in acceleration structure updates.
Inactive primitives are counted for PrimitiveIndex(), which affects the index values for neighboring active primitives. Similarly inactive instances are counted for InstanceIndex(), which affects the index for neighboring instances. This ensures that any array indexing an app wants to do based on index values for active primitives isn’t affected by the presence of inactive primitives earlier in the array.
For triangles and AABBs, none of the input coordinates may be NaN unless the first coordinate is also NaN (that is, only when the primitive is inactive), otherwise behavior is undefined.
Triangle vertices using an SNORM format (see VertexFormat in D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC) cannot be inactive, given SNORM has no NaN representation.
Degenerate primitives and instances
The following are considered “degenerate” (after applying all transforms): Triangles that form a point or a line, point sized AABBs (Min.X == Max.X, same for Y and Z), and instances referencing (non-NULL) bottom level acceleration structures containing no active primitives.
All degenerate primitives and instances are still considered “active” and may participate in acceleration structure updates with new data, switching to/from degenerate status freely.
Degenerate instances use a point at the instance origin (specified by the instance transform) to guide the acceleration structure builder. Apps should give a best estimate of where any future updates might place the instance.
AABBs with inverted bounds (Min.X > Max.X or similar for Y and Z) are converted to a degenerate point at the center of the input bounds for all acceleration structure operations.
During traversal, degenerate AABBs may still report possible (false positive) intersections and invoke the intersection shader. The shader may check the validity of the hit by, for example, inspecting the bounds.
Degenerate triangles, on the other hand, do not generate any intersections.
Degenerate primitives may be discarded from an acceleration structure
build, unless the ALLOW_UPDATE flag specified. As a consequence, the
coordinates returned during AS visualization may be replaced with NaNs
for these primitives.
An exception to the rule that degenerates cannot be discarded with
ALLOW_UPDATE specified is primitives that have repeated index value
can always be discarded (even with ALLOW_UPDATE specified). There
is no value in keeping them since index values cannot be changed.
The primitive count in the returned GeometryDescs and the number of InstanceDescs may be affected by any discarded primitives. The index (buffer location) and output order of active primitives will still be correct, however.
Geometry limits
The runtime does not enforce these limits (defined too late). Exceeding them produced undefined behavior.
Maximum number of geometries in a bottom level acceleration structure: 2^24
Maximum number of primitives in a bottom level acceleration structure (sum across all geometries): 2^29, including any inactive or degenerate primitives (described above).
Maximum instance count in a top level acceleration structure: 2^24
Acceleration structure update constraints
The following describes the data that an app can change to the inputs of an acceleration structure update relative to the inputs / flags etc. used to build the source acceleration structure. Note that per acceleration structure Data rules, once built they never hold explicit references to the data used to build them, so it is fine for an update to provide data from different addresses in memory as long as the only changes in the data itself conform to the following restrictions.
A rule of thumb is that the more that acceleration structure updates diverge from the original, the more that raytrace performance is likely to suffer. An implementation is expected to be able to retain whatever topology it might have in an acceleration structure during update.
Bottom-level acceleration structure updates
The VertexBuffer and/or Transform members of D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC can change. The Transform member cannot change between NULL <-> non-NULL, however. An app that wants to update Transform but doesn’t have one initially can specify the identity matrix rather than NULL.
Essentially this means vertex positions can change.
The AABBs member of D3D12_RAYTRACING_GEOMETRY_DESC can change.
Nothing else can change, so note that in particular this means no changes to properties like the number of geometries, VertexCount, or AABBs, geometry flags, data formats, index buffer contents and so on.
Note that if a bottom-level acceleration structure at a given address is pointed to by top-level acceleration structures ever changes, those top-level acceleration structures are stale and must either be rebuilt or updated before they are valid to use again.
Top-level acceleration structure updates
The InstanceDescs member of D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC can change.
This refers to D3D12_RAYTRACING_INSTANCE_DESC structures in GPU memory. The number of instances, defined by the NumDescs member of D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC, cannot change.
So aside from the number of instances used in the top-level acceleration structure being fixed, the definitions of each of the instances can be completely redefined during an acceleration structure update, including which bottom-level acceleration structure each instance points to.
Acceleration structure memory restrictions
Acceleration structures can only be placed in resources that are created
in the default heap (or custom heap equivalent). Further, resources that
will contain acceleration structures must be created in the state
D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE,
and must have resource flag D3D12_RESOURCE_FLAG_ALLOW_UNORDERED_ACCESS. The
ALLOW_UNORDERED_ACCESS requirement simply acknowledges both: that the
system will be doing this type of access in its implementation of
acceleration structure builds behind the scenes, and from the app point
of view, synchronization of writes/reads to acceleration structures is
accomplished using UAV barriers (discussed later).
For the following discussion, these resources are referred to as acceleration structure buffers (ASBs).
ASBs cannot be transitioned into any other state, or vice versa, otherwise the runtime will put the command list into removed state.
If a placed buffer is created that is an ASB, but there is an existing buffer overlapping the VA range that is not an ASB, or vice versa, this is an error enforceable by debug layer error.
Regarding reserved buffers, if a tile is ever mapped into an ASB and a non-ASB simultaneously this is an error enforceable by debug layer error. Mapping a tile into or out of an acceleration structure invalidates that tile’s contents.
The reason for segregating ASBs from non-ASB memory is to enable tools/PIX to be able to robustly capture applications that use raytracing. The restriction avoids instability/crashing from tools attempting to serialize what they think are opaque acceleration structures that might have been partially overwritten by other data because the app repurposed the memory without tools being able to track it. The key issue here is the opaqueness of acceleration structure data, requiring dedicated APIs for serializing and deserializing their data to be able to preserve application state.
Synchronizing acceleration structure memory writes/reads
Given that acceleration structures must always be in D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE as described above, resource state transitions can’t be used to synchronize between writes and reads (and vice versa) of acceleration structure data. Instead, the way to accomplish this is using UAV barriers on resources holding acceleration structure data between operations that write to an acceleration structure (such as BuildRaytracingAccelerationStructure() and operations that read from them (such as DispatchRays() (and vice versa).
The use of UAV barriers (as opposed to state transitions) for synchronizing acceleration structure accesses comes in handy for scenarios like compacting multiple acceleration structures. Each compaction reads an acceleration structure and then writes the compacted result to another address. An app can perform a string of compactions to tightly pack a collection of acceleration structures that all may be in the same resource. No resource transitions are necessary. Instead all that’s needed are a single UAV barrier after one or more original acceleration structure builds are complete before passing them into a sequence of compactions for each acceleration structure. Then another UAV barrier after compactions are done and the acceleration structures are referenced by DispatchRays() for raytracing.
Fixed function ray-triangle intersection specification
For manifold geometry:
- A single ray striking an edge in a scene must report an intersection with only one of the incident triangles. A ray striking a vertex must report an intersection with only one of the incident triangles. Which triangle is chosen may vary for different rays intersecting the same edge.
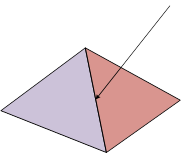
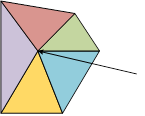
In the above examples of a shared edge intersection and a shared vertex intersection, only one triangle must be reported as intersected in each case.
For non-manifold geometry:
- When a ray strikes an edge shared by more than two triangles all triangles on one side of the edge (from the point of view of the ray) are intersected. When a ray strikes a vertex shared by separate surfaces, one triangle per surface is intersected. When a ray strikes a vertex shared by separate surfaces and strikes edges in the same place, the intersections for the points and the intersections for the edges each appear based on the individual rules for points and edges.
Watertightness
The implementation must use a ray-triangle intersection that is watertight. Regardless of where in the 32-bit float precision range ray-triangle intersections occur, gaps between triangles sharing edges must never appear. The scope of “sharing” for this definition of watertightness spans only a given bottom level acceleration structure for geometries that have matching transforms.
One example of an implementation of watertight ray-triangle intersection is here:
http://jcgt.org/published/0002/01/05/paper.pdf
The following is another example focused on being efficient with an acceleration structure implementation while maintaining watertightness:
https://www.intel.com/content/dam/develop/external/us/en/documents/rptraversal.pdf
It is expected that implementations of watertight ray triangle intersections are possible without having to resort to costly paths such as double precision fallbacks. This includes including following a form of top-left rule discussed below to remove double hits on edges.
Top-left rule
In triangle rasterization, the top-left rule guarantees consistent in/out determination on triangle edges across implementations with no holes or double hits on shared edges. This is possible because there is a consistent space involved (“screen space”) and snapping vertex positions to fixed point precision is done during rasterization, eliminating variance.
These conditions are not present with raytracing. So while some form of top-left rule (or equivalent) must be used by each implementation doing ray triangle intersection to decide whether intersections on edges are in or out, this only guarantees watertightness for that implementation and not exactly the same results across implementations.
What follows is an example top-left rule that can be applied by an implementation. The requirement is merely that implementations do something like this to guarantee the intersection properties described earlier.
Example top-left rule implementation
Determining a coordinate system
-
For each ray, choose a plane where ray-triangle intersections are performed. Obviously, the plane must be intersected by the ray and may not contain the ray. This plane is only a function of the ray itself (origin and direction) and might not be the same plane chosen by any other ray.
-
Compute the ray/plane intersection.
-
Originating at the intersection point, choose a direction within the plane, also a function of only the ray. Consider this direction to be left.
-
Take the cross product of left direction and the plane normal to establish the up direction. This yields the coordinate system needed to implement the top-left rule.
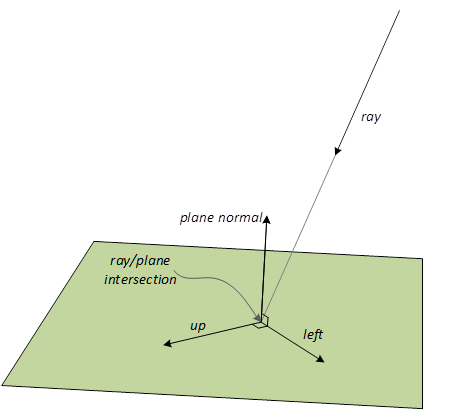
Hypothetical scheme for establishing plane for ray-tri intersection
Using the dominant ray direction is one way to establish a plane within which to perform intersection. This involves choosing from one of three plane orientations, matching the three major axes. The offset of the intersection plane is not important.
The below images show example ray direction to intersection plane mappings. Ray directions on the unit sphere map to three possible intersection planes.
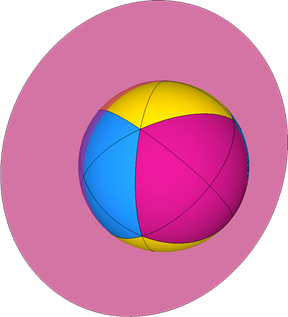

Choose the left direction within the plane based on next largest magnitude component of the normal.
In the below image, this corresponds to the colored triangular regions and corresponding left directions within the plane. There are two possible left directions within each of the three possible planes.
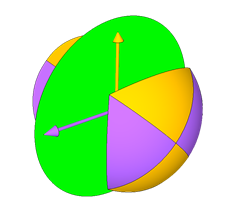
Triangle intersection
-
Projected the triangle onto the ray’s plane.
-
Test the triangle against the ray/plane intersection. If the ray/plane intersection is strictly interior to the triangle, report an intersection.
-
If the ray/plane intersection lies directly on one of the projected triangle’s edges, apply the top-left rule to establish whether the triangle is considered intersected:
Top edge: If a projected edge is exactly parallel to the left direction, and the up direction points away from the projected triangle’s interior in the space of the ray’s plane, then it is a “top” edge.*
Left edge: If a projected edge is not exactly parallel to the left direction, and the left direction points away from the projected triangle’s interior in the space of the ray’s plane, then it is a “left” edge. A triangle can have one or two left edges.*
Top-left rule: If the ray-plane intersection falls exactly on the edge of a projected triangle, the triangle is considered intersected if the edge is a “top” edge or a “left” edge. If two edges from the same projected triangle (a vertex) coincide with the ray-plane intersection, then if both edges are “top” or “left” then the triangle is considered intersected.*
Examples of classifying triangle edges
In the below image, a single left direction (red) is shown in the intersection plane. Inclusive edges are shown in black and exclusive edges shown in white. Note that the blue and magenta triangles have edges parallel to the left direction. In one case, the edge in question is an upper edge in the other case the edge is a lower edge, inclusive and exclusive respectively.
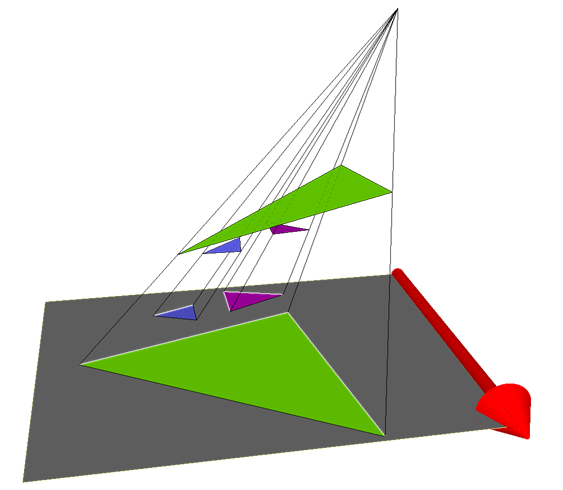
As a series of rays strike an edge, the left direction can change 90°. Because of the change in left direction, the inclusive/exclusive classification of an edge can change along the length of the edge. Classification may also change if the intersection plane changes (also a function of ray direction) along the length of an edge.
Ray extents
Ray-triangle intersection can only occur if the intersection t-value satisfies TMin < t < TMax.
Ray-procedural-primitive intersection can only occur if the intersection t-value satisfies TMin <= t <= TMax.
The reason procedural primitives use an inclusive bounds test is to give apps a choice about how to handle exactly overlapping intersections. For instance, an app could choose to compare primitiveID or somesuch for currently committed hit versus a candidate for intersection to decide whether to accept a new overlapping hit or not.
Ray TMin must be nonnegative and <= TMax. +INF is a valid TMin/TMax value (really only makes sense for TMax).
No part of ray origin, direction, T range can be NaN.
The runtime does not enforce these limits (they may get validated in GPU based validation eventually).
Violating these rules produces undefined behavior.
Ray recursion limit
Raytracing pipeline state objects must declare a maximum ray recursion depth (in the range [0..31]). The ray generation shader is depth 0. Below the maximum recursion depth, shader invocations such as closest hit or miss shaders can call TraceRay() any number of times. At the maximum recursion depth, TraceRay() calls result in the device going into removed state.
The current level of recursion cannot be retrieved from the system, due to the overhead that might be required to be able to report it to shaders. If applications need to track the level of ray recursion it can be done manually in the ray payload.
This recursion depth limit does not include callable shaders, which are not bounded except in the context of overall pipeline stack allocation.
Apps should pick a limit that is as low as absolutely necessary. There may be performance implications in how the implementation chooses to handle upper limits set at obvious thresholds – e.g. 0 means no tracingof rays at all (perhaps only using callable shaders or not even that), 1 means single bounce rays, and numbers above 1 might imply a different implementation strategy.
It isn’t expected that most apps would ever need to declare very large recursion limits. The upper limit of 31 is there to put a bound on the number of bits hardware has to reserve for a counter – inexpensive yet large enough range to likely never have to worry about.
Pipeline stack
Raytracing shaders including callable shaders may consume memory out of a driver managed stack allocation. This memory is internally allocated/reserved by the driver during command list recording, such that command list recording will fail if the driver wouldn’t be able to execute the command list due to the selected stack size. The stack memory requirement is expressed in terms of how much memory a call chain starting from an individual ray generation shader thread can consume, considering tracing rays, the various shaders that can be invoked in the process, including callable shaders, and nesting/recursion.
In practice typical systems will support many thousands of threads in flight at once, so the actual memory footprint for driver managed stack storage will be much larger than the space required for just one thread. This multiplication factor is an implementation detail not directly exposed to the app. That said, it is in the app’s best interest (if memory footprint is important) to make an optimal choice for the one number it has control over – individual thread stack size – to match what the app actually needs.
Raytracing pipeline state objects can optionally set a maximum pipeline stack size, otherwise a default value is used, which is typically overly conservative (though could underestimate if callable shaders recurse more than 2 levels). The way an app can calculate an optimal stack size if desired is described next, followed by an explanation of how the default is selected.
Here is an example of a situation where it really matters for an app to manually calculate the stack size rather than rely on the default: Suppose there is a complex closest hit shader with lots of state doing complex shading that recursively shoots a shadow ray that’s known to hit only trivial shaders with very small stack requirements. The default calculation described further below doesn’t know this and will assume all levels of recursion might invoke the expensive closest hit shader, resulting in wasted stack space reservation, multiplied by the number of threads in flight on the GPU.
Optimal pipeline stack size calculation
Apps can retrieve the stack space requirement for individual shaders in a raytracing pipeline via GetShaderStackSize(). (The result will be the same for a given shader if it appears in other raytracing pipelines.) If the app combines these sizes with what it may know about the worst case call stack amongst individual shaders during raytracing, along with the MaxTraceRecursionDepth it declared, it can calculate the correct stack size. This is something the system cannot do on its own.
The diagram below depicts how an app author can reason about calculating an optimal stack size based on the shaders being used in the raytracing pipeline and which ones might potentially be reachable (which only the app author can reasonably know).
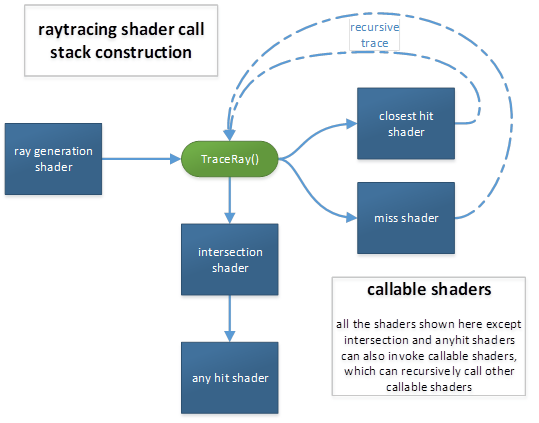
The app can set the overall stack storage per thread for a raytracing pipeline state via SetPipelineStackSize(). The specification for that method describes rules about when and how often the stack size can be set for a pipeline state.
Default pipeline stack size
The system initializes raytracing pipeline state objects with a default pipeline stack size computed as follows. This is calculation is intentionally simplified because it cannot account for what combination of shaders might actually execute (as that depends on application content and shader table layout, which are both unknown from the perspective of a raytracing pipeline state). The default stack size calculation takes the worst case combination of shaders in the raytracing pipeline in terms of individual stack sizes and factors in the maximum recursion level. For callable shaders, a default assumption is that every raytracing shader calls the callable shader with the maximum stack size to a recursion depth of 2.
The net result is that for raytracing pipelines with no callable shaders, the default stack size is guaranteed to safely fit the maximum declared level of recursion and the worst case combination of shaders. With callable shader in the mix, the default might be unsafe if the app happens to make more than 2 levels of recursive calls to the worst case callable shader on top of maxing out all other shaders.
The exact calculation is as follows. First a definition of the input variables.
For each shader type in the pipeline state, for which multiple instance of that shader type might be in the pipeline state, find the maximum individual shader stack size for that shader type. For this discussion, let us name these maximum values:
RGSMax (for max ray generation shader stack size) ISMax (intersection shader) AHSMax (any hit shader) CHSMax (closest hit shader) MSMax (miss shader) CSMax (callable shader)
The other relevant input is comes from the D3D12_RAYTRACING_PIPELINE_CONFIG subobject in the pipeline state: MaxTraceRecursionDepth.
Using these values, considering the raytracing shader call stack construction diagram above, and arbitrarily estimating callable shaders to be called 2 levels deep per shader stage, the default stack size calculation becomes:
DefaultPipelineStackSizeInBytes =
RGSMax
+ max( CHSMax, MSMax, ISMax+AHMax ) * min( 1, MaxTraceRecursionDepth )
+ max( CHSMax, MSMax ) * max( MaxTraceRecursionDepth - 1, 0 )
+ 2 * CSMax // if CS aren't used, this term will just be 0.
// 2 is a completely arbitrary choice
// Observe that ISMax and AHMax are only counted once, which results in
// the split clauses involving MaxTraceRecursionDepth. Intersection and
// anyhit shaders can't recurse.
Pipeline stack limit behavior
If making a call exceeds the declared stack size the device goes into removed state, similar to ray recursion overflow.
There is no practical limit on declared stack size. The runtime drops calls to SetPipelineStackSize() for extreme stack size values, >= 0xffffffff though (the parameter is actually UINT64 for this purpose). This is to catch the app blindly passing the return value of calling GetShaderStackSize() with invalid parameters, which returns 0xffffffff, either directly into SetPipelineStackSize or into a calculation summing stack sizes, multiple of which could be invalid values.
Shader limitations resulting from independence
Given that raytracing shader invocations are all independent of each other, features within shaders that explicitly rely on cross-shader communication are not allowed, with the exception of Wave Intrinsics described further below. Examples of features not available to shaders during raytracing: 2x2 shader invocation based derivatives (available in pixel shaders), thread execution syncing (available in compute).
Wave Intrinsics
Wave intrinsics are allowed in raytracing shaders, with the intent that they are for tools (PIX) logging. That said, applications are also not blocked from using wave intrinsics in case they might find safe use.
Implementations may repack threads at certain (well defined) points in raytracing shader execution such as calls to TraceRay(). As such, the results of wave intrinsics called within a shader are valid only until a potential thread repacking point is encountered in program execution order. In wave intrinsics have scopes of validity that are bounded by repacking points as well as the start/end of the shader.
Repacking points that bound wave intrinsic scope:
Other intrinsics that result in a bound due to ending the shader invocation:
Note that use of RayQuery objects for inline raytracing does not count as a repacking point.
When Shader Execution Reordering is supported see reorder points.
Execution and memory ordering
When TraceRay() or CallShader() are called, any resulting shader invocations complete by the time the call returns.
Memory operations (stores, atomics) performed by the caller can be guaranteed to be visible to the callee with a DeviceMemoryBarrier() in the caller after writes. The UAV must be declared [globallycoherent]. Input payload/parameter data is passed to callees by-value so does not require a barrier.
Memory operations performed by the callee can similarly be guaranteed to be visible to the caller (and any subsequent calls made by the caller) with similar UAV declaration and writes followed by memory barrier in the writing shader. Output payload/parameter data is returned to the caller by-value so does not require a barrier.
Also see Reorder points and Reorder points - memory coherence and visibility.
General tips for building acceleration structures
The following generalized advice apples to the use of BuildRaytracingAccelerationStructure(). While it is possible that over time as more diverse device support appears the advice needs to be refined, even as-is this should be a useful reminder of the various options at play.
-
Prefer triangle geometry over procedural primitives
- Ray-triangle intersection can be hardware accelerated
-
Mark geometry as OPAQUE whenever possible
- If geometry doesn’t require any-hit shader code to execute (e.g.
for alpha testing), then always make sure it’s marked as OPAQUE
to utilize the raytracing hardware as effectively as possible.
It doesn’t matter whether the OPAQUE flag comes from the
geometry descriptor (
D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE), the instance descriptor (D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OPAQUE), or through a ray flag (RAY_FLAG_FORCE_OPAQUE).
- If geometry doesn’t require any-hit shader code to execute (e.g.
for alpha testing), then always make sure it’s marked as OPAQUE
to utilize the raytracing hardware as effectively as possible.
It doesn’t matter whether the OPAQUE flag comes from the
geometry descriptor (
-
Merge many objects into fewer bottom-level acceleration structures
- In other words, take advantage of the fact that a build can accept more than one geometry descriptor and transform the geometry while building. This generally leads to the most efficient data structures, especially when objects’ AABBs overlap each other. In addition, it reduces the number of BuildRaytracingAccelerationStructure invocations which leads to higher GPU utilization and lower overall CPU overhead. Consider merging e.g. for objects that consist of multiple meshes (and need to be rebuilt/updated at the same time), and for any static or almost static geometry.
-
Only build/update per frame what’s really needed
- Acceleration updates aren’t free, so objects that haven’t deformed between frames shouldn’t trigger one. This is sometimes not trivial to detect in an engine, but the effort can pay off twice since it may also be able to skip a skinning/vertex update pass.
-
Consider multiple update sources for skinned meshes
- Acceleration structure updates can happen either in-place, or use separate source and destination buffers. For some geometry (e.g. a hero character), it can make sense to build multiple high quality acceleration structures in different key poses upfront (e.g. during level load time), and then refit every frame using the closest matching keyframe as a source.
-
Rebuild top-level acceleration structure every frame
- Only updating instead of rebuilding is rarely the right thing to do. Rebuilds for a few thousand instances are very fast, and having a good quality top-level acceleration structure can have a significant payoff (bad quality has a higher cost further up in the tree).
-
Use the right build flags
- The next section is a guideline for common use cases
Choosing acceleration structure build flags
- Start by choosing a D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS combination from here:
| # | PREFER_ FAST_ TRACE | PREFER_ FAST_ BUILD | ALLOW_ UPDATE | Properties | Example |
|---|---|---|---|---|---|
| 1 | no | yes | no | Fastest possible build. Slower trace than #3 and #4. |
Fully dynamic geometry like particles, destruction, changing prim counts or moving wildly (explosions etc), where per-frame rebuild is required. |
| 2 | no | yes | yes | Slightly slower build than #1, but allows very fast update. | Lower LOD dynamic objects, unlikely to be hit by too many rays but still need to be refitted per frame to be correct. |
| 3 | yes | no | no | Fastest possible trace. Slower build than #1 and #2. |
Default choice for static level geometry. |
| 4 | yes | no | yes | Fastest trace against update-able acceleration structure. Updates slightly slower than #2. Trace a bit slower than #3. |
Hero character, high-LOD dynamic objects that are expected to be hit by a significant number of rays. |
</small>
-
Then consider adding these flags:
ALLOW_COMPACTION
Whenever compaction is desired. It’s generally a good idea to do this on all static geometry to reclaim (potentially significant) amounts of memory.
For updateable geometry, it makes sense to compact those BVHs that have a long lifetime, so the extra step is worth it (compaction and update are not mutually exclusive!).
For fully dynamic geometry that’s rebuilt every frame (as opposed to updated), there’s generally no benefit from using compaction.
One potential reason to NOT use compaction is to exploit the guarantee of BVH storage requirements increasing monotonically with primitive count – this does not hold true in the context of compaction.
MINIMIZE_MEMORY
Use only when under general mem pressure, e.g. if otherwise a DXR path won’t run at all because things don’t fit. Usually costs build and trace perf.
Determining raytracing support
See CheckFeatureSupport() and D3D12_RAYTRACING_TIER. This reports the level of device raytracing support.
Raytracing emulation is completely independent of the above – it is just a software library that sits on top of D3D.
Raytracing emulation
The following emulation feature proved useful during the experimental phase of DXR design. But as of the first shipping release of DXR, the plan is to stop maintaining this codebase. The cost/benefit is not justified and further, over time as more native DXR support comes online, the value of emulation will diminish further. That said, the description of what was done is left in case a strong justification crops up to resurrect the feature.
The raytracing fallback layer is a library that provides support for raytracing on devices that do not have native driver/hardware support using a DX12 compute-shader-based solution. The library is built as a wrapper around the DX12 API and has distinct (but similar) interfaces from the DXR API. The library will also have an internal switch that allows it to use the DXR API when driver support exists, and fallback to compute when it doesn’t. A desired outcome is that a fallback is useful on existing hardware without native raytracing support (and without driver implemented emulation) at least for limited scope scenarios that complement/support traditional graphics based rendering techniques. Emulation can also serve as a form of reference implementation that runs on GPUs (as opposed to the WARP software rasterizer) that raytracing capable devices can be compared against.
The fallback layer will provide via a public GitHub repo where developers can build and incorporate the library into their own engines. The repo will be open for both engine developers and hardware developers to submit pull requests to improve the code base. A benefit to having the fallback layer outside of the OS is that it can be snapped with releases of the DXIL compiler and developers are free to tailor their snap of the fallback layer with optimizations specific to their codebase. The fallback layer can even be used on older Windows OS’s that do not have DXR API support.
The implementation will use a series of compute shaders to build acceleration structures on the GPU time line. Recursive shader invocations (via TraceRay or CallShader) will be handled by linking all shaders into a large state-machine shader that will emulate these invocations as function calls where parameters are saved off to a GPU-allocated stack. Performance is still TBD, but a goal is to ensure that common cases enable enough performance for small-scale techniques.
Tooling with the fallback layer will work with PIX. Use of PIX’s raytracing-specific debugging tools (acceleration structure visualization for example) however will be limited to hardware with driver support. The fallback layer’s raytracing invocations will be shown as the underlying compute shaders dispatches.
While the fallback layer interface tries to stay faithful to the original DXR API, there are several points of divergence. The primary difference is DXR’s requirement of reading pointers in shaders, primarily at ray dispatch when traversing from a top-level acceleration structure to a bottom-level acceleration structure. To mitigate this, the fallback layer forces the developer to provide pointers not as GPU VA’s but instead as “descriptor heap index” and “byte offset” pairs, referred to as an emulated pointer. These are also required for handling local root descriptors and array-of-pointer layouts. The expectation is that this provides an abstracted form of pointer support that will allow for minimal porting from the native DXR API.
Tools support
Some parts of the design have been tweaked to be friendly to tools such as debug layers and PIX doing capture, playback and analysis. In addition to the design tweaks listed below, several generic techniques can be applied by tools (not specific to raytracing), such as shader patching, root signature patching and more generally, API hooking.
Buffer bounds tracking
- DispatchRays() has input parameters are pointers (GPUVA) to shader tables. Size parameters are also present so that tools can tell how much memory is being used.
Acceleration structure processing
-
EmitRaytracingAccelerationStructurePostbuildInfo() and CopyRaytracingAccelerationStructure() support dedicated modes for tools to operate on acceleration structures in the following ways:
-
serialization: Driver serializes acceleration structures to a (still) opaque format that tools (or an app) can store to a file.
-
deserialization: Driver deserializes the serialized format above on a later playback of a captured application. The result is an acceleration structure that functions as the original did when serialized, and is the same size or smaller than the original structure before serialization. This only works on the same device / driver that the serialization was performed on.
-
visualization: Convert an opaque acceleration structure to a form that can be visualized by tools. This is a bit like the inverse of an acceleration structure build, where the output in this case is non-opaque geometry and/or bounding boxes. Tools can display a visualization of any acceleration structure at any point during an application run without having to incur overhead tracking how it was built.
The format of the output may not exactly match the inputs the application originally used to generate the acceleration structure, per the following:
For triangles, the output for visualization represents the same set of geometry as the application’s original acceleration structure, other than any level of order dependence or other variation permitted by the acceleration structure build spec. Transform matrices may have been folded into the geometry. Triangle format may be different (with no loss of precision) – so if the application used float16 data, the output of visualization might be float32 data.
For AABBs, any spatial volume contained in the original set of AABBs must be contained in the set of output AABBs, but may cover a larger volume with either a larger or smaller number of AABBS.
-
Note that serialization and deserialization may still be needed by PIX even if D3D12 gets support for repeatable VA assignment for allocations across application runs. If PIX wants to modify workloads at all during playback, VA can’t be preserved.
- See Acceleration structure update constraints for discussion on resource state requirements for acceleration structures that have been put in place. These restrictions, combined with the fact that all manipulations of acceleration structures must go through dedicated APIs for manipulating them mean that PIX can robustly trust the contents of an acceleration structure are valid.
API
Device methods
Per D3D12 device interface semantics, these device methods can be called by multiple threads simultaneously.
CheckFeatureSupport
HRESULT CheckFeatureSupport(
D3D12_FEATURE Feature,
[annotation("_Inout_updates_bytes_(FeatureSupportDataSize)")]
void* pFeatureSupportData,
UINT FeatureSupportDataSize
);
This isn’t a raytracing specific API, just the generic D3D API for
querying feature support. To query for raytracing support, pass
D3D12_FEATURE_D3D12_OPTIONS5 for Feature, and point
pFeatureSupportData to a D3D12_FEATURE_D3D12_OPTIONS5
variable. This has a member D3D12_RAYTRACING_TIER RaytracingTier.
CheckFeatureSupport Structures
D3D12_FEATURE_D3D12_OPTIONS5
// D3D12_FEATURE_D3D12_OPTIONS5
typedef struct D3D12_FEATURE_DATA_D3D12_OPTIONS5
{
[annotation("_Out_")] BOOL SRVOnlyTiledResourceTier3;
[annotation("_Out_")] D3D12_RENDER_PASS_TIER RenderPassesTier;
[annotation("_Out_")] D3D12_RAYTRACING_TIER RaytracingTier;
} D3D12_FEATURE_DATA_D3D12_OPTIONS5;
The D3D12 options struct that reports RaytracingTier, the raytracing support level (among other unreleated features). See D3D12_RAYTRACING_TIER.
D3D12_FEATURE_D3D12_OPTIONS_NNN
In development, not shipped yet.
// D3D12_FEATURE_D3D12_OPTIONS_NNN - NNN to be determined
typedef struct D3D12_FEATURE_DATA_D3D12_OPTIONS_NNN
{
[annotation("_Out_")] BOOL ClustersAndPTLASSupported;
[annotation("_Out_")] BOOL TemplateInstancePrefersCOMPRESSED1;
} D3D12_FEATURE_DATA_D3D12_OPTIONS_NNN;
The D3D12 options struct that reports ClustersAndPTLASSupported and the preferred vertex instantiation format for cluster templates.
The corresponding DDI capability is:
// D3D12DDI_D3D12_OPTIONS_DATA_0XXX - 0XXX to be determined
typedef struct D3D12DDI_D3D12_OPTIONS_DATA_0XXX
{
// ... existing fields ...
BOOL ClustersSupported;
BOOL PTLASSupported;
BOOL TemplateInstancePrefersCOMPRESSED1;
} D3D12DDI_D3D12_OPTIONS_DATA_0XXX;
The API reports ClustersAndPTLASSupported as TRUE when the DDI reports both ClustersSupported and PTLASSupported as TRUE. When both DDI support fields are TRUE, the API reports TemplateInstancePrefersCOMPRESSED1 directly from the corresponding DDI field. The DDI must report TemplateInstancePrefersCOMPRESSED1 as FALSE unless both support fields are TRUE; correspondingly, the API reports it as FALSE whenever ClustersAndPTLASSupported is FALSE.
ClustersAndPTLASSupported means support for:
- Clustered Geometry
- Partitioned Top Level Acceleration Structures
- Indirect Acceleration Structure Operations
- TriangleObjectPositions() are supported as well, by virtue of being a required feature in Shader Model 6.10. A device can support
TriangleObjectPositionswithoutClustersAndPTLASSupportedby just supporting Shader Model 6.10.
D3D12_RAYTRACING_TIER_2_0 requires ClustersAndPTLASSupported to be true.
A device that supports at least D3D12_RAYTRACING_TIER_1_1 can also report ClustersAndPTLASSupported to true, implying Shader Model 6.10 is also supported. This could be a device missing another requirement, in particular the Opacity Micromap support required from TIER_1_2.
TemplateInstancePrefersCOMPRESSED1
TemplateInstancePrefersCOMPRESSED1 reports the preferred vertex instantiation format for cluster templates. It is only meaningful when ClustersAndPTLASSupported is TRUE.
If TRUE, applications that are willing to make a per-device template format selection should prefer D3D12_VERTEX_FORMAT_COMPRESSED1. If FALSE, such applications should prefer another format, such as D3D12_VERTEX_FORMAT_FLOAT32_3, optionally with PositionTruncateBitCount. This is a performance preference only; all valid template vertex instantiation formats are supported regardless of device.
This preference applies only to VertexInstantiationFormat, which defines the functional precision and range stored in the instantiated CLAS. VertexSourceFormat is selected independently and may be any format valid for template instantiation; the device converts the input positions to VertexInstantiationFormat during instantiation. See Template instance format conversion semantics.
Independently of this preference, applications can optionally provide InstantiationBoundingBoxLimit for any selected template format, giving the implementation advance bounds on future instance positions. See Compressed1 with cluster templates for the preference rationale and additional guidance.
D3D12_RAYTRACING_TIER
typedef enum D3D12_RAYTRACING_TIER
{
D3D12_RAYTRACING_TIER_NOT_SUPPORTED = 0,
D3D12_RAYTRACING_TIER_1_0 = 10,
D3D12_RAYTRACING_TIER_1_1 = 11,
D3D12_RAYTRACING_TIER_1_2 = 12,
D3D12_RAYTRACING_TIER_2_0 = 20,
} D3D12_RAYTRACING_TIER;
Level of raytracing support on the device. Queried via CheckFeatureSupport().
| Value | Definition |
|---|---|
D3D12_RAYTRACING_TIER_NOT_SUPPORTED |
No support for raytracing on the device. Attempts to create any raytracing related object will fail and using raytracing related APIs on command lists results in undefined behavior. |
D3D12_RAYTRACING_TIER_1_0 |
The device supports the full raytracing functionality described in this spec, except features added in higher tiers listed below. |
D3D12_RAYTRACING_TIER_1_1 |
Adds: <li>Support for indirect DispatchRays() calls (ray generation shader invocation) via ExecuteIndirect().</li><li>Support for incremental additions to existing state objects via AddToStateObject().<li>Support for inline raytracing via RayQuery objects declarable in any shader stage.</li><li>GeometryIndex() intrinsic added to relevant raytracing shaders, for applications that wish to distinguish geometries manually in shaders in addition to or instead of by burning shader table slots.</li><li>Additional ray flags, RAY_FLAG_SKIP_TRIANGLES and RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES.</li><li>New version of raytracing pipeline config subobject, D3D12_RAYTRACING_PIPELINE_CONFIG1, adding a flags field, D3D12_RAYTRACING_PIPELINE_FLAGS. The equivalent subobject in HLSL is RaytracingPipelineConfig1. The available flags, D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_TRIANGLES and D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_PROCEDURAL_PRIMITIVES (minus D3D12_ when defined in HLSL) behave like OR’ing the equivalent RAY_FLAGS above into any TraceRay() call in a raytracing pipeline, except that these do not show up in a RayFlags() call from a shader. Implementations may be able to make pipeline optimizations knowing that one of the primitive types can be skipped.</li><li>Additional vertex formats supported for acceleration structure build input as part of D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC.</li> |
D3D12_RAYTRACING_TIER_1_2 |
Adds:<li>Opacity Micromaps</li><li>Shader Execution Reordering</li><li>The parts of these features involving shader code, which would be all of Shader Execution Reordering, as well as a small portion of Opacity Micromaps, exist in Shader Model 6.9 which is currently in preview. All the non-HLSL parts of Opacity Micromaps are available in release (non-preview).</li><li>All devices that support raytracing at all (D3D12_RAYTRACING_TIER_1_0+) and support Shader Model 6.9 must support Shader Execution Reordering. D3D12_RAYTRACING_TIER_1_2 simply means the device supports all of the features listed here.</li> |
D3D12_RAYTRACING_TIER_2_0 |
In development, not shipped yet: Adds:<li>Clustered Geometry</li><li>Partitioned Top Level Acceleration Structures</li><li>Indirect Acceleration Structure Operations</li><li>TriangleObjectPositions() are supported as well, by virtue of being a required feature in Shader Model 6.10. Shader Model 6.10 also must be supported by D3D12_RAYTRACING_TIER_2_0 devices.</li><li>Devices can support the above features without supporting D3D12_RAYTRACING_TIER_2_0 (e.g. some earlier feature such as Opacity Micromaps may be missing). In support of this there is a separate capability bit in D3D12_FEATURE_D3D12_OPTIONS_NNN, ClustersAndPTLASSupported that can be supported with at least D3D12_RAYTRACING_TIER_1_1 supported.</li> |
CreateStateObject
HRESULT CreateStateObject(
_In_ const D3D12_STATE_OBJECT_DESC* pDesc,
_In_ REFIID riid, // ID3D12StateObject
_COM_Outptr_ void** ppStateObject
);
See State objects for an overview.
| Parameter | Definition |
|---|---|
const D3D12_STATE_OBJECT_DESC* pDesc |
Description of state object to create. See D3D12_STATE_OBJECT_DESC. To help generate this see the CD3D12_STATE_OBJECT_DESC helper in class in d3dx12.h. |
REFIID riid |
__uuidof(ID3D12StateObject) |
_COM_Outptr_ void** ppStateObject |
Returned state object. |
Return: HRESULT |
S_OK for success. E_INVALIDARG, E_OUTOFMEMORY on failure. The debug layer provides detailed status information. |
CreateStateObject Structures
Helper/sample wrapper code is available to make using the below structures for defining state objects much simpler to use.
D3D12_STATE_OBJECT_DESC
typedef struct D3D12_STATE_OBJECT_DESC
{
D3D12_STATE_OBJECT_TYPE Type;
UINT NumSubobjects;
_In_reads_(NumSubobjects) const D3D12_STATE_SUBOBJECT* pSubobjects;
} D3D12_STATE_OBJECT_DESC;
| Member | Definition |
|---|---|
D3D12_STATE_OBJECT_TYPE Type |
See D3D12_STATE_OBJECT_TYPE. |
UINT NumSubobjects |
Size of pSubobjects array. |
_In_reads(NumSubobjects) const D3D12_STATE_SUBOBJECT* pSubobjects |
Array of subobject definitions. See D3D12_STATE_SUBOBJECT. |
D3D12_STATE_OBJECT_TYPE
typedef enum D3D12_STATE_OBJECT_TYPE
{
D3D12_STATE_OBJECT_TYPE_COLLECTION = 0,
// Could be added in future: D3D12_STATE_OBJECT_TYPE_COMPUTE_PIPELINE = 1,
// Could be added in future: D3D12_STATE_OBJECT_TYPE_GRAPHICS_PIPELINE = 2,
D3D12_STATE_OBJECT_TYPE_RAYTRACING_PIPELINE = 3,
} D3D12_STATE_OBJECT_TYPE;
| Value | Definition |
|---|---|
D3D12_STATE_OBJECT_TYPE_COLLECTION |
Collection state object. |
D3D12_STATE_OBJECT_TYPE_RAYTRACING_PIPELINE |
Raytracing pipeline state object. |
D3D12_STATE_SUBOBJECT
typedef struct D3D12_STATE_SUBOBJECT
{
D3D12_STATE_SUBOBJECT_TYPE Type;
const void* pDesc;
} D3D12_STATE_SUBOBJECT;
Subobject within a state object description.
| Parameter | Definition |
|---|---|
D3D12_STATE_SUBOBJECT_TYPE Type |
See D3D12_STATE_SUBOBJECT_TYPE. |
const void* pDesc |
Pointer to state object description of the specified type. |
D3D12_STATE_SUBOBJECT_TYPE
typedef enum D3D12_STATE_SUBOBJECT_TYPE
{
D3D12_STATE_SUBOBJECT_TYPE_STATE_OBJECT_CONFIG = 0,
D3D12_STATE_SUBOBJECT_TYPE_GLOBAL_ROOT_SIGNATURE = 1,
D3D12_STATE_SUBOBJECT_TYPE_LOCAL_ROOT_SIGNATURE = 2,
D3D12_STATE_SUBOBJECT_TYPE_NODE_MASK = 3,
// 4 unused
D3D12_STATE_SUBOBJECT_TYPE_DXIL_LIBRARY = 5,
D3D12_STATE_SUBOBJECT_TYPE_EXISTING_COLLECTION = 6,
D3D12_STATE_SUBOBJECT_TYPE_SUBOBJECT_TO_EXPORTS_ASSOCIATION = 7,
D3D12_STATE_SUBOBJECT_TYPE_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION = 8,
D3D12_STATE_SUBOBJECT_TYPE_RAYTRACING_SHADER_CONFIG = 9,
D3D12_STATE_SUBOBJECT_TYPE_RAYTRACING_PIPELINE_CONFIG = 10,
D3D12_STATE_SUBOBJECT_TYPE_HIT_GROUP = 11,
D3D12_STATE_SUBOBJECT_TYPE_MAX_VALID,
} D3D12_STATE_SUBOBJECT_TYPE;
Set of subobject types, each with a corresponding struct definition.
| Parameter | Definition |
|---|---|
D3D12_STATE_SUBOBJECT_TYPE_STATE_OBJECT_CONFIG |
D3D12_STATE_OBJECT_CONFIG |
D3D12_STATE_SUBOBJECT_TYPE_GLOBAL_ROOT_SIGNATURE |
D3D12_GLOBAL_ROOT_SIGNATURE |
D3D12_STATE_SUBOBJECT_TYPE_LOCAL_ROOT_SIGNATURE |
D3D12_LOCAL_ROOT_SIGNATURE |
D3D12_STATE_SUBOBJECT_TYPE_NODE_MASK |
D3D12_NODE_MASK |
D3D12_STATE_SUBOBJECT_TYPE_DXIL_LIBRARY |
D3D12_DXIL_LIBRARY_DESC |
D3D12_STATE_SUBOBJECT_TYPE_EXISTING_COLLECTION |
D3D12_EXISTING_COLLECTION_DESC |
D3D12_STATE_SUBOBJECT_TYPE_SUBOBJECT_TO_EXPORTS_ASSOCIATION |
D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION |
D3D12_STATE_SUBOBJECT_TYPE_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION |
D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION |
D3D12_STATE_SUBOBJECT_TYPE_RAYTRACING_SHADER_CONFIG |
D3D12_RAYTRACING_SHADER_CONFIG |
D3D12_STATE_SUBOBJECT_TYPE_RAYTRACING_PIPELINE_CONFIG |
D3D12_RAYTRACING_PIPELINE_CONFIG |
D3D12_STATE_SUBOBJECT_TYPE_HIT_GROUP |
D3D12_HIT_GROUP_DESC |
D3D12_STATE_OBJECT_CONFIG
typedef struct D3D12_STATE_OBJECT_CONFIG
{
D3D12_STATE_OBJECT_FLAGS Flags;
} D3D12_STATE_OBJECT_CONFIG;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
This subobject defines general properties of a state object. The
presence of this subobject in a state object is optional. If
present, all exports in the state object must be associated with the
same subobject (or one with a matching definition). This consistency
requirement does not apply across existing collections that are included
in a larger state object, with the exception of the presence of the D3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONS flag, detailed below.
| Member | Definition |
|---|---|
D3D12_STATE_OBJECT_FLAGS Flags |
See D3D12_STATE_OBJECT_FLAGS. |
D3D12_STATE_OBJECT_FLAGS
typedef enum D3D12_STATE_OBJECT_FLAGS
{
D3D12_STATE_OBJECT_FLAG_NONE = 0x0,
D3D12_STATE_OBJECT_FLAG_ALLOW_LOCAL_DEPENDENCIES_ON_EXTERNAL_DEFINITONS = 0x1,
D3D12_STATE_OBJECT_FLAG_ALLOW_EXTERNAL_DEPENDENCIES_ON_LOCAL_DEFINITIONS = 0x2,
D3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONS = 0x4,
} D3D12_STATE_OBJECT_FLAGS;
| Value | Definition |
|---|---|
D3D12_STATE_OBJECT_FLAG_ALLOW_LOCAL_DEPENDENCIES_ON_EXTERNAL_DEFINITONS |
<p>This applies to state objects of type collection only, ignored otherwise.</p><p>The exports from this collection are allowed to have unresolved references (dependencies) that would have to be resolved (defined) when the collection is included in a containing state object (e.g. RTPSO). This includes depending on an externally defined subobject associations to associate an external subobject (e.g. root signature) to a local export.</p><p>In the absence of this flag (default), all exports in this collection must have their dependencies fully locally resolved, including any necessary subobject associations being defined locally. Advanced implementations/drivers will have enough information to compile the code in the collection and not need to keep around any uncompiled code (unless the D3D12_STATE_OBJECT_FLAG_ALLOW_EXTERNAL_DEPENDENCIES_ON_LOCAL_DEFINITIONS flag is set). So that when the collection is used in a containing state object (e.g. RTPSO), minimal work needs to be done by the driver, ideally a “cheap” link at most.</p><p>Even with this flag, there is never visibility of code across separate state object definitions that are combined incrementally via the AddToStateObject() API.</p> |
D3D12_STATE_OBJECT_FLAG_ALLOW_EXTERNAL_DEPENDENCIES_ON_LOCAL_DEFINITIONS |
<p>This applies to state objects of type collection only, ignored otherwise.</p><p>If a collection is included in another state object (e.g. RTPSO), allow shaders / functions in the rest of the containing state object to depend on (e.g. call) exports from this collection.</p><p> In the absence of this flag (default), exports from this collection cannot be directly referenced by other parts of containing state objects (e.g. RTPSO). This can reduce memory footprint for the collection slightly since drivers don’t need to keep uncompiled code in the collection on the off chance that it may get called by some external function that would then compile all the code together. That said, if not all necessary subobject associations have been locally defined for code in this collection, the driver may not be able to compile shader code yet and may still need to keep uncompiled code around.</p><p>A subobject association defined externally that associates an external subobject to a local export does not count as an external dependency on a local definition, so the presence or absence of this flag does not affect whether the association is allowed or not. On the other hand if the current collection defines a subobject association for a locally defined subobject to an external export (e.g. shader), that counts as an external dependency on a local definition, so this flag must be set.</p><p>Also, regardless of the presence or absence of this flag, shader entrypoints (such as hit groups or miss shaders) in the collection are visible as entrypoints to a containing state object (e.g. RTPSO) if exported by it. In the case of an RTPSO, the exported entrypoints can be used in shader tables for raytracing.</p><p>Even with this flag, there is never visibility of code across separate state object definitions that are combined incrementally via the AddToStateObject() API.</p> |
D3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONS |
<p>The presence of this flag in an executable state object, e.g. raytracing pipeline, allows the state object to be passed into AddToStateObject() calls, either as the original state object, or the portion being added.</p><p>The presence of this flag in a collection state object means the collection can be imported by executable state objects (e.g. raytracing pipelines) regardless of whether they have also set this flag. The absence of this flag in a collection state object means the collection can only be imported by executable state objects that also do not set this flag. |
D3D12_GLOBAL_ROOT_SIGNATURE
typedef struct D3D12_GLOBAL_ROOT_SIGNATURE
{
ID3D12RootSignature* pGlobalRootSignature;
} D3D12_GLOBAL_ROOT_SIGNATURE;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
This subobject defines a global root signature that will be used with associated shaders. The presence of this subobject in a state object is optional. The combination of global and/or local root signatures associated with any given shader function must define all resource bindings declared by the shader (with no overlap across global and local root signatures).
If any given function in a call graph is associated with a particular global root signature, any other functions in the graph must either be associated with the same global root signature or none, and the shader entry (the root of the call graph) must be associated with the global root signature.
Different shaders can use different global root signatures (or none) within a state object, however any shaders referenced during a particular DispatchRays() operation from a CommandList must have specified the same global root signature as what has been set on the CommandList as the compute root signature. So it is valid to define a single large state object with multiple global root signatures associated with different subsets of the shaders – apps are not forced to split their state object just because some shaders use different global root signatures.
| Member | Definition |
|---|---|
ID3D12RootSignature* pGlobalRootSignature |
Root signature that will function as a global root signature. State object holds a reference. |
D3D12_LOCAL_ROOT_SIGNATURE
typedef struct D3D12_LOCAL_ROOT_SIGNATURE
{
ID3D12RootSignature* pLocalRootSignature;
} D3D12_LOCAL_ROOT_SIGNATURE;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
This subobject defines a local root signature that will be used with associated shaders. The presence of this subobject in a state object is optional. The combination of global and/or local root signatures associated with any given shader function must define all resource bindings declared by the shader (with no overlap across global and local root signatures).
If any given function in a call graph (not counting calls across shader tables) is associated with a particular local root signature, any other functions in the graph must either be associated with the same local root signature or none, and the shader entry (the root of the call graph) must be associated with the local root signature.
This corresponds to the fact that the set of code reachable from a given shader entry gets invoked from a shader identifier in a shader record, where a single set of local root arguments apply. Of course different shaders can use different local root signatures (or none), as their shader identifiers will be in different shader records.
| Member | Definition |
|---|---|
ID3D12RootSignature* pLocalRootSignature |
Root signature that will function as a local root signature. State object holds a reference. |
D3D12_DXIL_LIBRARY_DESC
typedef struct D3D12_DXIL_LIBRARY_DESC
{
D3D12_SHADER_BYTECODE DXILLibrary;
UINT NumExports;
_In_reads_(NumExports) D3D12_EXPORT_DESC* pExports;
} D3D12_DXIL_LIBRARY_DESC;
| Member | Definition |
|---|---|
D3D12_SHADER_BYTECODE DXILLibrary |
Library to include in the state object. Must have been compiled with library target 6.3 or higher. It is fine to specify the same library multiple times either in the same state object / collection or across multiple, as long as the names exported each time don’t conflict in a given state object. |
UINT NumExports |
Size of pExports array. If 0, everything gets exported from the library. |
_In_reads(NumExports) D3D12_EXPORT_DESC* pExports |
Optional exports array. See D3D12_EXPORT_DESC. |
D3D12_EXPORT_DESC
typedef struct D3D12_EXPORT_DESC
{
LPCWSTR Name;
_In_opt_ LPCWSTR ExportToRename;
D3D12_EXPORT_FLAGS Flags;
} D3D12_EXPORT_DESC;
| Member | Definition |
|---|---|
LPWSTR Name |
<p>Name to be exported. If the name refers to a function that is overloaded, a mangled version of the name (function parameter information encoded in name string) can be provided to disambiguate which overload to use. The mangled name for a function can be retrieved from HLSL compiler reflection (not documented in this spec).</p><p> If ExportToRename field is non-null, Name refers to the new name to use for it when exported. In this case Name must be an unmangled name, whereas ExportToRename can be either a mangled or unmangled name. A given internal name may be exported multiple times with different renames (and/or not renamed).</p> |
_In_opt_ LPWSTR ExportToRename |
If non-null, this is the name of an export to use but then rename when exported. Described further above. |
D3D12_EXPORT_FLAGS Flags |
Flags to apply to the export. |
D3D12_EXPORT_FLAGS
typedef enum D3D12_EXPORT_FLAGS
{
D3D12_EXPORT_FLAG_NONE = 0x0,
} D3D12_EXPORT_FLAGS;
No export flags are currently defined.
D3D12_EXISTING_COLLECTION_DESC
typedef struct D3D12_EXISTING_COLLECTION_DESC
{
ID3D12StateObject* pExistingCollection;
UINT NumExports;
_In_reads_(NumExports) D3D12_EXPORT_DESC* pExports;
} D3D12_EXISTING_COLLECTION_DESC;
| Member | Definition |
|---|---|
ID3D12StateObject* pExistingCollection |
Collection to include in state object. Enclosing state object holds a ref on the existing collection. |
UINT NumExports |
Size of pExports array. If 0, all of the collection’s exports get exported. |
_In_reads(NumExports) D3D12_EXPORT_DESC* pExports |
Optional exports array. See D3D12_EXPORT_DESC. |
D3D12_HIT_GROUP_DESC
typedef struct D3D12_HIT_GROUP_DESC
{
LPWSTR HitGroupExport;
D3D12_HIT_GROUP_TYPE Type;
_In_opt_ LPWSTR AnyHitShaderImport;
_In_opt_ LPWSTR ClosestHitShaderImport;
_In_opt_ LPWSTR IntersectionShaderImport;
} D3D12_HIT_GROUP_DESC;
| Member | Definition |
|---|---|
LPWSTR HitGroupExport |
Name to give to hit group. |
D3D12_HIT_GROUP_TYPE Type |
See D3D12_HIT_GROUP_TYPE. |
_In_opt_ LPWSTR AnyHitShaderImport |
Optional name of anyhit shader. Can be used with all hit group types. |
_In_opt_ LPWSTR ClosestHitShaderImport |
Optional name of closesthit shader. Can be used with all hit group types. |
_In_opt_ LPWSTR IntersectionShaderImport |
Optional name of intersection shader. Can only be used with hit groups of type procedural primitive. |
D3D12_HIT_GROUP_TYPE
typedef enum D3D12_HIT_GROUP_TYPE
{
D3D12_HIT_GROUP_TYPE_TRIANGLES = 0x0,
D3D12_HIT_GROUP_TYPE_PROCEDURAL_PRIMITIVE = 0x1,
} D3D12_HIT_GROUP_TYPE;
Specify the type of hit group. For triangles, the hit group can’t contain an intersection shader. For procedural primitives, the hit group must contain an intersection shader.
This enum exists to allow the possibility in the future of having other hit group types which may not otherwise be distinguishable from the other members of
D3D12_HIT_GROUP_DESC. For instance, a new type might simply change the meaning of the intersection shader import to represent a different formulation of procedural primitive.
D3D12_RAYTRACING_SHADER_CONFIG
typedef struct D3D12_RAYTRACING_SHADER_CONFIG
{
UINT MaxPayloadSizeInBytes;
UINT MaxAttributeSizeInBytes;
} D3D12_RAYTRACING_SHADER_CONFIG;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
A raytracing pipeline needs one raytracing shader configuration. If multiple shader configurations are present (such as one in each collection to enable independent driver compilation for each one) they must all match when combined into a raytracing pipeline.
| Member | Definition |
|---|---|
UINT MaxPayloadSizeInBytes |
The maximum storage for scalars (counted as 4 bytes each) in ray payloads in raytracing pipelines that contain this program. Callable shader payloads are not part of this limit. This field is ignored for payloads that use payload access qualifiers. |
UINT MaxAttributeSizeInBytes |
The maximum number of scalars (counted as 4 bytes each) that can be used for attributes in pipelines that contain this shader. The value cannot exceed D3D12_RAYTRACING_MAX_ATTRIBUTE_SIZE_IN_BYTES. |
D3D12_RAYTRACING_PIPELINE_CONFIG
typedef struct D3D12_RAYTRACING_PIPELINE_CONFIG
{
UINT MaxTraceRecursionDepth;
} D3D12_RAYTRACING_PIPELINE_CONFIG;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
A raytracing pipeline needs one raytracing pipeline configuration. If multiple shader configurations are present (such as one in each collection to enable independent driver compilation for each one) they must all match when combined into a raytracing pipeline.
| Member | Definition |
|---|---|
UINT MaxTraceRecursionDepth |
Limit on ray recursion for the raytracing pipeline. See Ray recursion limit. |
D3D12_RAYTRACING_PIPELINE_CONFIG1
typedef struct D3D12_RAYTRACING_PIPELINE_CONFIG1
{
UINT MaxTraceRecursionDepth;
D3D12_RAYTRACING_PIPELINE_FLAGS Flags;
} D3D12_RAYTRACING_PIPELINE_CONFIG1;
This adds a Flags field relative to its predecessor, D3D12_RAYTRACING_PIPELINE_CONFIG. D3D12_RAYTRACING_PIPELINE_CONFIG1 requires Tier 1.1 raytracing support.
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
A raytracing pipeline needs one raytracing pipeline configuration. If multiple shader configurations are present (such as one in each collection to enable independent driver compilation for each one) they must all match when combined into a raytracing pipeline.
| Member | Definition |
|---|---|
UINT MaxTraceRecursionDepth |
Limit on ray recursion for the raytracing pipeline. See Ray recursion limit. |
D3D12_RAYTRACING_PIPELINE_FLAGS Flags |
See D3D12_RAYTRACING_PIPELINE_FLAGS. |
D3D12_RAYTRACING_PIPELINE_FLAGS
typedef enum D3D12_RAYTRACING_PIPELINE_FLAGS
{
D3D12_RAYTRACING_PIPELINE_FLAG_NONE = 0x0,
D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_TRIANGLES = 0x100,
D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_PROCEDURAL_PRIMITIVES = 0x200,
D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS = 0x400,
D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_CLUSTERED_GEOMETRY = 0x800,
} D3D12_RAYTRACING_PIPELINE_FLAGS;
Flags member of D3D12_RAYTRACING_PIPELINE_CONFIG1.
| Value | Definition |
|---|---|
D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_TRIANGLES |
<p>For any TraceRay() call within this raytracing pipeline, add in the RAY_FLAG_SKIP_TRIANGLES Ray flag. The resulting combination of ray flags must be valid. The presence of this flag in a raytracing pipeline config does not show up in a RayFlags() call from a shader. Implementations may be able to optimize pipelines knowing that a particular primitive type need not be considered.</p> |
D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_PROCEDURAL_PRIMITIVES |
<p>For any TraceRay() call within this raytracing pipeline, add in the RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES Ray flag. The resulting combination of ray flags must be valid. The presence of this flag in a raytracing pipeline config does not show up in a RayFlags() call from a shader. Implementations may be able to optimize pipelines knowing that a particular primitive type need not be considered.</p> |
D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS |
If this flag is specified, the pipeline supports Opacity Micromaps. If a triangle with an OMM is encountered during traversal with this flag cleared, behavior is undefined. This flag should not be set if there are no OMMs present, since it may incur a small penalty on traversal performance overall. This flag is part of the Opacity Micromaps feature. This flag applies to accessing OMMs via TraceRay(), whereas for RayQuery::TraceRayInline(), the same is accomplished by specifying RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPS in the second template parameter to RayQuery. |
D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_CLUSTERED_GEOMETRY |
If this flag is specified, the pipeline supports clustered geometry. Behavior is undefined if an acceleration structure with clustered geometry is accessed from a pipeline that didn’t specify this flag. |
D3D12_NODE_MASK
typedef struct D3D12_NODE_MASK
{
UINT NodeMask;
} D3D12_NODE_MASK;
This is a subobject type that can be associated with shader exports. A summary of the rules about which subobject types can/must be associated with various shaders in a state object is here.
The node mask subobject identifies which GPU nodes the state object applies to. It is optional; in its absence the state object applies to all available nodes. If a node mask subobject has been associated with any part of a state object, a node mask association must be made to all exports in a state object (including imported collections) and all node mask subobjects that are referenced must have matching content.
D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION
typedef struct D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION
{
const D3D12_STATE_SUBOBJECT* pSubobjectToAssociate;
UINT NumExports;
_In_reads_(NumExports) LPCWSTR* pExports;
} D3D12_SUBOBJECT_TO_EXPORTS_ASSOCIATION;
Associates a subobject defined directly in a state object with shader exports. Depending on the choice of flags in the optional D3D12_STATE_OBJECT_CONFIG subobject for opting in to cross linkage, the exports being associated don’t necessarily have to be present in the current state object (or one that has been seen yet) – to be resolved later, e.g. on RTPSO creation. See Subobject association behavior for detail.
| Member | Definition |
|---|---|
const D3D12_STATE_SUBOBJECT* pSubobjectToAssociate |
Pointer to subobject in current state object to define an association to. |
UINT NumExports |
<p>Size of export array. If 0, this is being explicitly defined as a default association. See Subobject association behavior.</p><p>Another way to define a default association is to omit this subobject association for that subobject completely.</p> |
_In_reads_(NumExports) LPCWSTR* pExports |
Exports to associate subobject with. |
D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION
typedef struct D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION
{
LPWCSTR pDXILSubobjectName;
UINT NumExports;
_In_reads_(NumExports) LPCWSTR* pExports;
} D3D12_DXIL_SUBOBJECT_TO_EXPORTS_ASSOCIATION;
Associates a subobject defined in a DXIL library (not necessarily one that has been seen yet) with shader exports. See Subobject association behavior for details.
| Member | Definition |
|---|---|
LPWSTR pDXILSubobjectName |
Name of subobject defined in a DXIL library. |
UINT NumExports |
<p>Size of export array. If 0, this is being explicitly defined as a default association. See Subobject association behavior.</p><p>Another way to define a default association is to omit this subobject association for that subobject completely.</p> |
_In_reads_(NumExports) LPCWSTR* pExports |
Exports to associate subobject with. |
AddToStateObject
HRESULT AddToStateObject(
_In_ const D3D12_STATE_OBJECT_DESC* pAddition,
_In_ ID3D12StateObject* pStateObjectToGrowFrom,
_In_ REFIID riid, // ID3D12StateObject
_COM_Outptr_ void** ppNewStateObject
);
Incrementally add to an existing state object. This incurs lower CPU overhead than creating a state object from scratch that is a superset of an existing one (e.g. adding a few more shaders). The reasons for lower overhead are:
-
The D3D runtime doesn’t have to re-validate the correctness of the existing state object. It only needs to check that what is being added is valid and doens’t conflict with what is already in the state object.
-
The driver ideally only needs to compile the shaders that have been added, and even that is avoided if what is being added happens to be an existing collection. In a clean driver implementation, there need only be a lightweight high level link step for the overall the state object.
It wasn’t deemed worth the effort or complexity to support incremental deletion, i.e. DeleteFromStateObject(). If an app finds that state object memory footprint is such a problem that it needs to periodically trim by shrinking state objects, it has to create the desired smaller state objects from scratch. In this case, if existing collections are used to piece together the smaller state object, at least driver overhead will be reduced, if not runtime overhead of parsing/validating the new state object as a whole.
Since AddToStateObject returns a new state object, this enables the application to free the original object when it is no longer needed (and no longer referenced by in flight work). A byproduct is that it is valid to create a branching lineage of state objects via AddToStateObject, even though the common case is likely only a single line of inheritance. A given state object only exposes exports that it added plus what it’s parent exposed, and not what any siblings do. Shader identifiers from a parent remain valid for it’s children, so do not need to be re-retrieved.
State object lifetimes as seen by driver is a discussion useful for driver authors.
The runtime uses a shared mutex across all state objects within a family to enforce thread safety: The AddToStateObject API takes a writer lock on state objects within a family. And APIs that retrieve shader export based information, GetShaderIdentifier() and GetShaderStackSize(), take a shared reader lock on state objects in a family.
A straightforward way to minimize any thread contention is to retrieve any needed shader identifiers etc. from a state object right after it is created (and remembering that any other state objects created from this one share identifiers so they need not be re-retrieved). So that by the time
AddToStateObjectneeds to be called, nothing will be at risk of blocking (unlessAddToStateObjectitself is called in parallel with related state objects for some reason).
The new state object starts off with the same pipeline stack size setting as the previous. (The runtime doesn’t try to enforce thread safety against the app calling SetPipelineStackSize() to change stack size on the existing state object while it is being used in an AddToStateObject() call.) After AddToStateObject() returns a new state object, the app can call GetShaderStackSize() on newly added shaders to decide if the pipeline stack size for the new state object needs to be updated via SetPipelineStackSize().
There are some stipulations about how the additions to a state object must relate to what exists already in the state object (validated by the runtime):
-
The state object description must be fully self-contained, e.g. not reference any contents of the existing state object. Said another way, the description must be valid to have been sent to CreateStateObject() on its own.
-
Global subobjects definitions, such as D3D12_RAYTRACING_PIPELINE_CONFIG, must be consistent with how they are defined in the existing state object (e.g. same MaxTraceRecursionDepth).
-
The original state object and the portion being added must both opt-in to being used with AddToStateObject(). This is accomplished by specifying the flag
D3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONSas part of the flags member of D3D12_STATE_OBJECT_CONFIG. See flags for more detail such as whatD3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONSmeans for collection state objects. -
Any exported shader entrypoints (i.e. that support shader identifiers) must have unique names that do not conflict with exports from the existing state object.
-
Non shader entrypoints, such as library functions, are allowed to be defined over again (reusing a name with same or different code definition) relative to what already in the state object - necessary if they need to be visible locally. The same is true for any of the various subobjects that are defined.
Disallowing cross-visibility between the existing state object and what is being added offers several benefits. It simplifies the incremental compilation burden on the driver, e.g. it isn’t forced to touch existing compiled code. It avoids messy semantic issues like the presence of a new subobject affecting default associations that may have applied to the existing state object (if cross visibility were possible). Finally it simplifies runtime validation code complexity.
| Parameter | Definition |
|---|---|
const D3D12_STATE_OBJECT_DESC* pAddition |
Description of state object contents to add to existing state object. See D3D12_STATE_OBJECT_DESC. To help generate this see the CD3D12_STATE_OBJECT_DESC helper in class in d3dx12.h. |
ID3D12StateObject* pStateObjectToGrowFrom |
<p>Existing state object, which can be in use (e.g. active raytracing) during this operation.</p><p>The existing state object must not be of type Collection - it is deemed too complex to bother defining behavioral semantics for this.</p> |
REFIID riid |
__uuidof(ID3D12StateObject) |
_COM_Outptr_ void** ppNewStateObject |
<p>Returned state object.</p><p>Behavior is undefined if shader identifiers are retrieved for new shaders from this call and they are accessed via shader tables by any already existing or in flight command list that references some older state object. Use of the new shaders added to the state object can only occur from commands (such as DispatchRays or ExecuteIndirect calls) recorded in a command list after the call to AddToStateObject.</p> |
Return: HRESULT |
S_OK for success. E_INVALIDARG, E_OUTOFMEMORY on failure. The debug layer provides detailed status information. |
GetRaytracingAccelerationStructurePrebuildInfo
void GetRaytracingAccelerationStructurePrebuildInfo(
_In_ const D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS* pDesc,
_Out_ D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO *pInfo);
Query the driver for resource requirements to build an acceleration structure. The input acceleration structure description is the same as what goes into BuildRaytracingAccelerationStructure(). The result of this function lets the application provide the correct amount of output storage and scratch storage to BuildRaytracingAccelerationStructure() given the same geometry.
Builds can also be done with the same configuration passed to GetAccelerationStructurePrebuildInfo() overall except equal or smaller counts for any of: number of geometries/instances and number of vertices/indices/AABBs in any given geometry. In this case the storage requirements reported with the original sizes passed to GetRaytracingAccelerationStructurePrebuildInfo() will be valid – the build may actually consume less space but not more. This is handy for app scenarios where having conservatively large storage allocated for acceleration structures is fine.
This method is on the device as opposed to command list on the assumption that drivers must be able to calculate resource requirements for an acceleration structure build from only looking at the CPU visible portions of the call, without having to dereference any pointers to GPU memory containing actual vertex data, index data etc.
| Parameter | Definition |
|---|---|
const D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS* pDesc |
<p>Description of the acceleration structure build. See D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS. This structure is shared with BuildRaytracingAccelerationStructure().</p><p> The implementation is allowed to look at all the CPU parameters in this struct and nested structs. It may not inspect/dereference any GPU virtual addresses, other than to check to see if a pointer is NULL or not, such as the optional Transform in D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC, without dereferencing it.</p><p>In other words, the calculation of resource requirements for the acceleration structure does not depend on the actual geometry data (such as vertex positions), rather it can only depend on overall properties, such as the number of triangles, number of instances etc.</p><p>If actual GPUVAs aren’t known at the time of the call, dummy non-zero values can be used just for the purposes for the prebuild call for entires that will be replaced with real non-null GPUVAs for build.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO* pInfo |
Result ( D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO) of query. |
GetRaytracingAccelerationStructurePrebuildInfo Structures
In addition to below, see BuildRaytracingAccelerationStructure() for other structures (common to both APIs).
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO
{
UINT64 ResultDataMaxSizeInBytes;
UINT64 ScratchDataSizeInBytes;
UINT64 UpdateScratchDataSizeInBytes;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_PREBUILD_INFO;
| Member | Definition |
|---|---|
UINT64 ResultDataMaxSizeInBytes |
Size required to hold the result of an acceleration structure build based on the specified inputs. |
UINT64 ScratchDataSizeInBytes |
Scratch storage on GPU required during acceleration structure build based on the specified inputs. |
UINT64 UpdateScratchDataSizeInBytes |
<p>Scratch storage on GPU required during an acceleration structure update based on the specified inputs. This only needs to be called for the original acceleration structure build, and defines the scratch storage requirement for every acceleration structure update (other than the initial build).</p><p>If the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_UPDATE flag is not specified, this parameter returns 0.</p><p>For Opacity Micromaps, this parameter returns 0 as update doesn’t apply.</p> |
CheckDriverMatchingIdentifier
D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS
CheckDriverMatchingIdentifier(
_In_ D3D12_SERIALIZED_DATA_TYPE SerializedDataType,
_In_ const D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER* pIdentifierToCheck);
Suppose an app has data that has been serialized by a driver. In
particular, the data is a serialized raytracing acceleration structure
resulting from a call to CopyRaytracingAccelerationStructure()
with mode D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_SERIALIZE,
likely from a previous execution of the application. CheckDriverMatchingIdentifier()
reports the compatibility of the serialized data with the current device/driver.
Drivers that support raytracing must recognize D3D12_SERIALIZED_DATA_RAYTRACING_ACCELERATION_STRUCTURE as a valid serialized data type. Returning D3D12_DRIVER_MATCHING_IDENTIFIER_UNSUPPORTED_TYPE for this type is not permitted when the device supports raytracing. The driver must instead return UNRECOGNIZED, INCOMPATIBLE_VERSION, or COMPATIBLE_WITH_DEVICE as appropriate for the identifier provided.
| Parameter | Definition |
|---|---|
D3D12_SERIALIZED_DATA_TYPE SerializedDataType |
See D3D12_SERIALIZED_DATA_TYPE. |
const D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER* pIdentifierToCheck |
Identifier from the header of the serialized data to check with the driver. See D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER. |
Return: D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS |
See D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS |
CheckDriverMatchingIdentifier Structures
D3D12_SERIALIZED_DATA_TYPE
typedef enum D3D12_SERIALIZED_DATA_TYPE
{
D3D12_SERIALIZED_DATA_RAYTRACING_ACCELERATION_STRUCTURE = 0x0,
D3D12_SERIALIZED_DATA_APPLICATION_SPECIFIC_DRIVER_STATE = 0x1,
} D3D12_SERIALIZED_DATA_TYPE;
Type of serialized data. At the moment there is only one:
| Value | Definition |
|---|---|
D3D12_SERIALIZED_DATA_RAYTRACING_ACCELERATION_STRUCTURE |
Serialized data contains a raytracing acceleration structure, including BLAS, TLAS, Opacity Micromap arrays, CLAS, Cluster BLAS, Cluster Templates, and Partitioned TLAS. |
D3D12_SERIALIZED_DATA_APPLICATION_SPECIFIC_DRIVER_STATE |
Unrelated to raytracing, CheckDriverMatchingIdentifier is also used for the application specific driver state feature, specified elsewhere. |
D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER
typedef struct D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER
{
GUID DriverOpaqueGUID;
BYTE DriverOpaqueVersioningData[16];
} D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER;
Opaque data structure describing driver versioning for a serialized acceleration structure. This is a member of the header for serialized acceleration structure, D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER. Passing this identifier into CheckDriverMatchingIdentifier() tells an app if a previously serialized acceleration structure is compatible with the current driver/device, and can therefore be deserialized and used for raytracing.
D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS
typedef enum D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS
{
D3D12_DRIVER_MATCHING_IDENTIFIER_COMPATIBLE_WITH_DEVICE = 0x0,
D3D12_DRIVER_MATCHING_IDENTIFIER_UNSUPPORTED_TYPE = 0x1,
D3D12_DRIVER_MATCHING_IDENTIFIER_UNRECOGNIZED = 0x2,
D3D12_DRIVER_MATCHING_IDENTIFIER_INCOMPATIBLE_VERSION = 0x3,
D3D12_DRIVER_MATCHING_IDENTIFIER_INCOMPATIBLE_TYPE = 0x4,
} D3D12_DRIVER_MATCHING_IDENTIFIER_STATUS;
Return value for CheckDriverMatchingIdentifier().
| Value | Definition |
|---|---|
D3D12_DRIVER_MATCHING_IDENTIFIER_COMPATIBLE_WITH_DEVICE |
Serialized data is compatible with the current device/driver. |
D3D12_DRIVER_MATCHING_IDENTIFIER_UNSUPPORTED_TYPE |
D3D12_SERIALIZED_DATA_TYPE specified is unknown or unsupported. Drivers that support raytracing must not return this value for D3D12_SERIALIZED_DATA_RAYTRACING_ACCELERATION_STRUCTURE; they must recognize the type and return one of the other status values (such as UNRECOGNIZED or INCOMPATIBLE_VERSION if the identifier is not compatible). This applies to all object types serialized under this enum value, including BLAS, TLAS, Opacity Micromap arrays, CLAS, Cluster BLAS, Cluster Templates, and Partitioned TLAS. |
D3D12_DRIVER_MATCHING_IDENTIFIER_UNRECOGNIZED |
Format of the data in D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER is unrecognized. This could indicate either corrupt data or the identifier was produced by a different hardware vendor. |
D3D12_DRIVER_MATCHING_IDENTIFIER_INCOMPATIBLE_VERSION |
Serialized data is recognized (likely from the same hardware vendor), but its version is not compatible with the current driver. |
D3D12_DRIVER_MATCHING_IDENTIFIER_INCOMPATIBLE_TYPE |
D3D12_SERIALIZED_DATA_TYPE specifies a data type that is not compatible with the type of serialized data. As long as there is only a single defined serialized data type this error cannot not be produced. |
CreateCommandSignature
HRESULT ID3D12Device::CreateCommandSignature(
const D3D12_COMMAND_SIGNATURE_DESC* pDesc,
ID3D12RootSignature* pRootSignature,
REFIID riid, // Expected: ID3D12CommandSignature
void** ppCommandSignature
);
This isn’t a raytracing specific API, just the generic D3D API for creating command signatures to be used in ExecuteIndirect(). What is shown in this section are additions to enable indirect DispatchRays() calls from an indirect arguments buffer.
In particular the, D3D12_COMMAND_SIGNATURE_DESC field can be set up to enable DispatchRays.
CreateCommandSignature Structures
D3D12_COMMAND_SIGNATURE_DESC
typedef struct D3D12_COMMAND_SIGNATURE_DESC
{
// The number of bytes between each drawing structure
UINT ByteStride;
UINT NumArgumentDescs;
const D3D12_INDIRECT_ARGUMENT_DESC *pArgumentDescs;
UINT NodeMask;
} D3D12_COMMAND_SIGNATURE_DESC;
Struct for defining a command signature via CreateCommandSignature(). The relevance to raytracing is the D3D12_INDIRECT_ARGUMENT_DESC array can have an entry for DispatchRays parameters as its last entry (and is mutually exclusive to the use of Draw or Dispatch arguments in a command signature).
D3D12_INDIRECT_ARGUMENT_DESC
typedef struct D3D12_INDIRECT_ARGUMENT_DESC
{
D3D12_INDIRECT_ARGUMENT_TYPE Type;
...
} D3D12_INDIRECT_ARGUMENT_DESC;
Struct for defining an indirect argument in D3D12_COMMAND_SIGNATURE_DESC. Only showing the relevant field for raytracing, D3D12_INDIRECT_ARGUMENT_TYPE, which has an entry for DispatchRays.
D3D12_INDIRECT_ARGUMENT_TYPE
typedef enum D3D12_INDIRECT_ARGUMENT_TYPE
{
...
D3D12_INDIRECT_ARGUMENT_TYPE_DISPATCH_RAYS,
...
} D3D12_INDIRECT_ARGUMENT_TYPE;
Parameter type for D3D12_INDIRECT_ARGUMENT_DESC. Only showing the relevant value for raytracing DispatchRays here:
| Value | Definition |
|---|---|
D3D12_INDIRECT_ARGUMENT_TYPE_DISPATCH_RAYS |
<p>DispatchRays argument in command signature. Each command in the indirect argument buffer includes D3D12_DISPATCH_RAYS_DESC values for the current indirect argument.</p><p>When this argument is used, the command signature can’t change vertex buffer or index buffer bindings (as those are related to the Draw pipeline only).</p> |
Command list methods
For all command list methods, at command list recording the runtime makes a deep copy of the parameters (not including data in GPU memory pointed to via GPU virtual addresses). So the application’s CPU memory for the parameters is no longer referenced when the call returns. When the commands actually execute on the GPU timeline any GPU memory identified by GPU virtual addresses gets accessed, giving freedom for the application to change that memory independent of command list recording time.
BuildRaytracingAccelerationStructure
void BuildRaytracingAccelerationStructure(
_In_ const D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC* pDesc,
_In_ UINT NumPostbuildInfoDescs,
_In_reads_opt_(NumPostbuildInfoDescs)
const D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC* pPostbuildInfoDescs
);
Perform an acceleration structure build on the GPU. Also optionally output postbuild information immediately after the build.
CPU-side input buffers are not referenced after this call.
GPU-side input resources are not referenced after the build has finished executing via ExecuteCommandList().
This postbuild information can also be obtained separately from an already built acceleration structure via EmitRaytracingAccelerationStructurePostbuildInfo(). The advantage of generating postbuild info along with a build is that a barrier isn’t needed in between the build completing and requesting postbuild information, for the case where an app knows it needs the postbuild info right away.
See Geometry and acceleration structures for an overview.
See Acceleration structure properties for a discussion of rules and determinism.
Also see General tips for building acceleration structures.
Clustered BLAS and Partitioned TLAS are not built through this API. See ExecuteIndirectRTASOperations() for GPU-driven acceleration structure operations.
Can be called on graphics or compute command lists but not from bundles.
| Parameter | Definition |
|---|---|
const D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC* pDesc |
Description of the acceleration structure to build. See D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC. |
UINT NumPostbuildInfoDescs |
Size of postbuild info desc array. Set to 0 if none are needed. |
const D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC* pPostbuildInfoDescs |
Optional array of descriptions for postbuild info to generate describing properties of the acceleration structure that was built. See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC. Any given postbuild info type,D3D12_RAYTRACING_ACCELRATION_STRUCTURE_POSTBUILD_INFO_TYPE, can only be selected for output by at most one array entry. |
BuildRaytracingAccelerationStructure Structures
D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC
typedef struct D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC
{
D3D12_GPU_VIRTUAL_ADDRESS DestAccelerationStructureData;
D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS Inputs;
_In_opt_ D3D12_GPU_VIRTUAL_ADDRESS SourceAccelerationStructureData;
D3D12_GPU_VIRTUAL_ADDRESS ScratchAccelerationStructureData;
} D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_DESC;
| Member | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS DestAccelerationStructureData |
<p> Location to store resulting acceleration structure. GetRaytracingAccelerationStructurePrebuildInfo() reports the amount of memory required for the result here given a set of acceleration structure build parameters.</p><p> The address must be aligned to 256 bytes (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT).</p><p> The memory pointed to must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p> |
D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS Inputs |
Description of the input data for the acceleration structure build. This is packaged in its own struct since it is shared with GetRaytracingAccelerationStructurePrebuildInfo(). |
D3D12_GPU_VIRTUAL_ADDRESS SourceAccelerationStructureData |
<p>Address of an existing acceleration structure if an acceleration structure update (incremental build) is being requested, by setting D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PERFORM_UPDATE in the Flags parameter. Otherwise this address must be NULL.</p><p> If this address is the same as DestAccelerationStructureData, the update is to be performed in-place. Any other form of overlap of the source and destination memory is invalid and produces undefined behavior.</p><p>The address must be aligned to 256 bytes (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT). This is somewhat redundant requirement as any existing acceleration structure passed in here would have already been required to be placed with such alignment anyway.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p> |
D3D12_GPU_VIRTUAL_ADDRESS ScratchAccelerationStructureData |
<p>Location where the build will store temporary data.GetRaytracingAccelerationStructurePrebuildInfo() reports the amount of scratch memory the implementation will need for a given set of acceleration structure build parameters.</p><p> The address must be aligned to 256 bytes (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT).</p><p> Contents of this memory going into a build on the GPU timeline are irrelevant and will not be preserved. After the build is complete on the GPU timeline, the memory is left with whatever undefined contents the build finished with.</p><p> The memory pointed to must be in state D3D12_RESOURCE_STATE_UNORDERED_ACCESS.</p> |
D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS
typedef struct D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE Type;
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS Flags;
UINT NumDescs;
D3D12_ELEMENTS_LAYOUT DescsLayout;
union
{
D3D12_GPU_VIRTUAL_ADDRESS InstanceDescs;
const D3D12_RAYTRACING_GEOMETRY_DESC* pGeometryDescs;
const D3D12_RAYTRACING_GEOMETRY_DESC*const* ppGeometryDescs;
const D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC* pOpacityMicromapArrayDesc;
};
} D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS;
This structure is used by both BuildRaytracingAccelerationStructure() and GetRaytracingAccelerationStructurePrebuildInfo().
For GetRaytracingAccelerationStructurePrebuildInfo(),
which isn’t actually doing a build, any parameter that is referenced via
D3D12_GPU_VIRTUAL_ADDRESS (in GPU memory), like InstanceDescs, will
not be accessed by the operation. So this memory does not need to be
initialized yet or be in a particular resource state. Whether GPU
addresses are null or not can be inspected by the operation, even
though the pointers are not dereferenced. If actual GPUVAs aren’t known
at the time of the call, dummy non-zero values can be used just for the
purposes for the prebuild call for entires that will be replaced
with real non-null GPUVAs for build.
| Member | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE Type |
Type of acceleration structure to build (see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE). |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS Flags |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS to use for the build. |
UINT NumDescs |
<p> If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TOP_LEVEL, number of instances (laid out based on DescsLayout).</p><p>If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BOTTOM_LEVEL, number of elements pGeometryDescs or ppGeometryDescs refer to (which one is used depends on DescsLayout).</p> |
D3D12_ELEMENTS_LAYOUT DescsLayout |
How geometry descs are specified (see D3D12_ELEMENTS_LAYOUT): an array of descs or an array of pointers to descs. |
const D3D12_GPU_VIRTUAL_ADDRESS InstanceDescs |
<p> If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TOP_LEVEL, this refers to NumDescs D3D12_RAYTRACING_INSTANCE_DESC structures in GPU memory describing instances. Each instance must be aligned to 16 bytes (D3D12_RAYTRACING_INSTANCE_DESC_BYTE_ALIGNMENT).</p><p>If DescLayout is D3D12_ELEMENTS_LAYOUT_ARRAY, InstanceDescs points to an array of instance descs in GPU memory.</p><p>If DescLayout is D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS, InstanceDescs points to an array in GPU memory of D3D12_GPU_VIRTUAL_ADDRESS pointers to instance descs.</p><p>If Type is not D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TOP_LEVEL, this parameter is unused (space repurposed in a union).</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p> |
const D3D12_RAYTRACING_GEOMETRY_DESC* pGeometryDescs |
<p>If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BOTTOM_LEVEL, and DescsLayout is D3D12_ELEMENTS_LAYOUT_ARRAY, this field is used and points to NumDescs contiguous D3D12_RAYTRACING_GEOMETRY_DESC structures on the CPU describing individual geometries.</p><p>If Type is not D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BOTTOM_LEVEL or DescsLayout is not D3D12_ELEMENTS_LAYOUT_ARRAY, this parameter is unused (space repurposed in a union).</p><p>The reason pGeometryDescs is a CPU based parameter as opposed to InstanceDescs which live on the GPU is, at least for initial implementations, the CPU needs to look at some of the information such as triangle counts in pGeometryDescs in order to schedule acceleration structure builds. Perhaps in the future more of the data can live on the GPU.</p> |
const D3D12_RAYTRACING_GEOMETRY_DESC** ppGeometryDescs |
<p>If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BOTTOM_LEVEL, and DescsLayout is D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS, this field is used and points to an array of NumDescs pointers to D3D12_RAYTRACING_GEOMETRY_DESC structures on the CPU describing individual geometries.</p><p>If Type is not D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BOTTOM_LEVEL or DescsLayout is not D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS, this parameter is unused (space repurposed in a union).</p><p>ppGeometryDescs is a CPU based parameter for the same reason as pGeometryDescs described above. The only difference is this option lets the app have sparsely located geometry descs if desired.</p> |
const D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC* pOpacityMicromapArrayDesc |
<p>If Type is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_OPACITY_MICROMAP_ARRAY, this field is used and points to a single D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC structure on the CPU. NumDescs must be 1, and DescsLayout must be D3D12_ELEMENTS_LAYOUT_ARRAY (even though it is just an array of 1 desc). Note that the single structure being pointed to itself has fields describing an array of OMMs. The array description there is split into multiple parts, so it doesn’t work to specify just one array in this D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS union as with other acceleration structures.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE
typedef enum D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_TOP_LEVEL = 0x0,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_BOTTOM_LEVEL = 0x1,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_OPACITY_MICROMAP_ARRAY = 0x2,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTER_LEVEL = 0x3,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTER_TEMPLATE = 0x4,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTERED_BOTTOM_LEVEL = 0x5,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_PARTITIONED_TOP_LEVEL = 0x6,
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE;
| Value | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_TOP_LEVEL |
Top-level acceleration structure. Enum used by both D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS and D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_BOTTOM_LEVEL |
Bottom-level acceleration structure. Enum used by both D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS and D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_OPACITY_MICROMAP_ARRAY |
Opacity micromap array. This is part of the Opacity Micromaps feature. Enum used by both D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS and D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTER_LEVEL |
Cluster-level acceleration structure. Not supported by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS. This entry is only used by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER for tools readback for the Clustered geometry feature. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTER_TEMPLATE |
Cluster template object. Not supported by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS. This entry is only used by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER for tools readback for the Clustered geometry feature. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_CLUSTERED_BOTTOM_LEVEL |
Clustered Bottom-level acceleration structure. Not supported by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS. This entry is only used by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER for tools readback for the Clustered geometry feature. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE_PARTITIONED_TOP_LEVEL |
Partitioned top level. Not supported by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS. This entry is only used by D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER for tools readback for the Partitioned top level acceleratino structures feature. |
Descriptions of these types are at Geometry and acceleration structures and visualized in Ray-geometry interaction diagram.
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS
typedef enum D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_NONE = 0x00,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_UPDATE =0x01,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_COMPACTION= 0x02,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_TRACE= 0x04,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_BUILD= 0x08,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_MINIMIZE_MEMORY= 0x10,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PERFORM_UPDATE= 0x20,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE = 0x40,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS = 0x80,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS = 0x100
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS;
| Member | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_NONE |
No options specified for the acceleration structure build. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_UPDATE |
<p>Applicable to TLAS and BLAS builds. Not supported for Opacity Micromap Array builds where update doesn’t apply.</p><p>Build the acceleration structure such that it supports future updates (via the flag D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PERFORM_UPDATE) instead of the app having to entirely rebuild. This option may result in increased memory consumption, build times and lower raytracing performance. Future updates, however, should be faster than building the equivalent acceleration structure from scratch.</p><p>This flag can only be set on an initial acceleration structure build, or on an update where the source acceleration structure specified ALLOW_UPDATE. In other words as soon as an acceleration structure has been built without ALLOW_UPDATE, no other acceleration structures can be created from it via updates.</p><p>When the Opacity Micromaps feature is being used, if D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE is specified on a BLAS, OMM linkage can be changed along with positions when the next update is performed. Replacing an OMM array at the same location requires a linkage update for BLAS’s referencing it even though the linkage pointer didn’t change. _ALLOW_OMM_LINKAGE_SUPPORT can’t be specified without _ALLOW_UPDATE, implying updates always require positions to be specified, whether or not OMM linkages are also being updated. If OMM linkages are present, even if they aren’t being updated, the description must still be specified in an update.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_COMPACTION |
<p>Enables the option to compact the acceleration structure by calling CopyRaytracingAccelerationStructure() with the compact mode (see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE).</p><p> This option may result in increased memory consumption and build times. After future compaction, however, the resulting acceleration structure should consume a smaller memory footprint (certainly no larger) than building the acceleration structure from scratch.</p><p>Specifying ALLOW_COMPACTION may increase pre-compaction acceleration structure size versus not specifying ALLOW_COMPACTION.</p><p>If multiple incremental builds are performed before finally compacting, there may be redundant compaction related work performed.</p><p>The size required for the compacted acceleration structure can be queried before compaction via EmitRaytracingAccelerationStructurePostbuildInfo() – see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC in particular for a discussion on some properties of compacted acceleration structure size.</p><p>This flag is compatible with all other flags. If specified as part of an acceleration structure update, the source acceleration structure must have also been built with this flag. In other words as soon as an acceleration structure has been built without ALLOW_COMPACTION, no other acceleration structures can be created from it via updates that specify ALLOW_COMPACTION.</p><p>Note on interaction of ALLOW_UPDATE with ALLOW_COMPACTION that might apply to some implementations:</p><p>As long as ALLOW_UPDATE is specified, there is certain information that needs to be retained in the acceleration structure, and compaction will only help so much.</p><p>However, if the implementation knows that the acceleration structure will no longer be updated, it could do a better job of compacting it.</p><p>The application could benefit from compacting twice - once after the initial build, and once after the acceleration structure has “settled” to a static state (if ever).</p><p>Applicable to TLAS, BLAS and OMM Array builds.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_TRACE |
<p>Construct a high quality acceleration structure that maximizes raytracing performance at the expense of additional build time. A rough rule of thumb is the implementation should take about 2-3 times the build time than default in order to get better tracing performance.</p><p> This flag is recommended for static geometry in particular. It is also compatible with all other flags except for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_BUILD.</p><p>This flag applies to all acceleration structure types, including OMM arrays.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_BUILD |
<p>Construct a lower quality acceleration structure, trading raytracing performance for build speed. A rough rule of thumb is the implementation should take about 1/2 to 1/3 the build time than default at a sacrifice in tracing performance.</p><p>This flag is compatible with all other flags except for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PREFER_FAST_TRACE.</p><p>This flag applies to all acceleration structure types, including OMM arrays.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_MINIMIZE_MEMORY |
<p>Minimize the amount of scratch memory used during the acceleration structure build as well as the size of the result. This option may result in increased build times and/or raytracing times.</p><p>This is orthogonal to the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_COMPACTION flag (and explicit acceleration structure compaction that it enables). Combining the flags can mean both the initial acceleration structure as well as the result of compacting it use less memory.</p><p>The impact of using this flag for a build is reflected in the result of calling GetRaytracingAccelerationStructurePrebuildInfo() before doing the build to retrieve memory requirements for the build.</p><p>This flag is compatible with all other flags.</p><p>Applicable to TLAS and BLAS builds.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_PERFORM_UPDATE |
<p> Perform an acceleration structure update, as opposed to building from scratch. This is faster than a full build, but can negatively impact raytracing performance, especially if the positions of the underlying objects have changed significantly from the original build of the acceleration structure before updates.</p><p>See Acceleration structure update constraints for a discussion of what is allowed to change in an acceleration structure update.</p><p>If the addresses of the source and destination acceleration structures are identical, the update is performed in-place. Any other overlapping of address ranges of the source and destination is invalid. For non-overlapping source and destinations, the source acceleration structure is unmodified. The memory requirement for the output acceleration structure is the same as in the input acceleration structure.</p><p>The source acceleration structure must have specified ALLOW_UPDATE (and if needed ALLOW_OMM_LINKAGE_UPDATE).</p><p>_PERFORM_UPDATE compatible with all other flags. The other flags selections, aside from ALLOW_UPDATE and PERFORM_UPDATE, must match the flags in the source acceleration structure.</p><p>Acceleration structure updates can be performed in unlimited succession, as long as the source acceleration structure was created with D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_UPDATE and/or _ALLOW_OMM_LINKAGE_UPDATE, and if opting to continue allowing future updates, the build specifies the same combination of ALLOW_*_UPDATE flags (set can’t change other than setting none if updates are forever finished).</p><p>If OMM linkage is present and not being updated, the original linkage description must still be passed into the update operation.</p><p>Applicable to TLAS and BLAS builds. Not supported for Opacity Micromap Array builds where update doesn’t apply.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE |
<p>The AS supports updates that change OMM linkage (fields of D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC). Replacing an OMM array at the same location requires a linkage update for BLAS’ referencing it even though the linkage pointer didn’t change. Specifying this flag may result in larger AS size and may reduce traversal performance.</p><p>Rules for when ALLOW_OMM_LINKAGE_UPDATE can be set mirror the rules described ALLOW_UPDATE, except only applicable if OMMs are present.</p><p>ALLOW_OMM_LINKAGE_UPDATE can only be set if ALLOW_UPDATE is also set.</p><p>While any part of the linkage description can be changed, switching between having an OMM linkage at all and not having one isn’t permitted.</p><p>If an acceleration structure with OMM linkage is having just it’s positions updated (not the OMM linkage), so ALLOW_OMM_LINKAGE_UPDATE isn’t specified, the update description still has to provide the original OMM linkage description.</p><p>Applicable to BLAS builds.</p><p>This is part of the Opacity Micromaps feature.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS |
Only applicable for BLAS builds. If enabled, any instances referencing this BLAS are allowed to disable the OMM test through the D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS flag. Specifying this build flag may result in some reductions in traversal performance. This is part of the Opacity Micromaps feature. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS |
This is not shipped yet, part of Shader Model 6.10: Only applicable for BLAS builds. For Clusters BLAS builds, comprised of individual clusters, see D3D12_RTAS_OPERATION_FLAG_ALLOW_DATA_ACCESS. Allows the use of the proposed geometry fetch intrinsic TriangleObjectPositions() in AnyHit or ClosestHit shaders, or in RayQuery: RayQuery::CandidateTriangleObjectPositions() or RayQuery::CommittedTriangleObjectPositions(). |
D3D12_ELEMENTS_LAYOUT
typedef enum D3D12_ELEMENTS_LAYOUT
{
D3D12_ELEMENTS_LAYOUT_ARRAY = 0x0,
D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS = 0x1
} D3D12_ELEMENTS_LAYOUT;
Given a data set of n elements, describes how the locations of the elements are identified.
| Member | Definition |
|---|---|
D3D12_ELEMENTS_LAYOUT_ARRAY |
For a data set of n elements, the pointer parameter simply points to the start of an of n elements in memory. |
D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS |
For a data set of n elements, the pointer parameter points to an array of n pointers in memory, each pointing to an individual element of the set. |
D3D12_RAYTRACING_GEOMETRY_DESC
typedef struct D3D12_RAYTRACING_GEOMETRY_DESC
{
D3D12_RAYTRACING_GEOMETRY_TYPE Type;
D3D12_RAYTRACING_GEOMETRY_FLAGS Flags;
union
{
D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC Triangles;
D3D12_RAYTRACING_GEOMETRY_AABBS_DESC AABBs;
D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC OmmTriangles;
};
} D3D12_RAYTRACING_GEOMETRY_DESC;
| Member | Definition |
|---|---|
D3D12_RAYTRACING_GEOMETRY_TYPE Type |
D3D12_RAYTRACING_GEOMETRY_TYPE for this geometry. |
D3D12_RAYTRACING_GEOMETRY_FLAGS Flags |
D3D12_RAYTRACING_GEOMETRY_FLAGS for this geometry. |
D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC Triangles |
D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC describing triangle geometry if Type is D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES. Otherwise this parameter is unused (space repurposed in a union). |
D3D12_RAYTRACING_GEOMETRY_AABBS_DESC AABBs |
D3D12_RAYTRACING_GEOMETRY_AABBS_DESC describing AABB geometry if Type is D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS. Otherwise this parameter is unused (space repurposed in a union). |
D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC OmmTriangles |
Describes triangle geometry which may optionally use opacity micromaps, if Type is D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLES. Otherwise, this parameter is unused (space repurposed in a union). This is part of the Opacity Micromaps feature. |
D3D12_RAYTRACING_GEOMETRY_TYPE
typedef enum D3D12_RAYTRACING_GEOMETRY_TYPE
{
D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES,
D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS,
D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLES
} D3D12_RAYTRACING_GEOMETRY_TYPE;
| Value | Definition |
|---|---|
D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES |
The geometry consists of triangles described by D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC. |
D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS |
The geometry procedurally is defined during raytracing by intersection shaders. So for the purpose of acceleration structure builds, the geometry’s bounds are described with axis-aligned bounding boxes via D3D12_RAYTRACING_GEOMETRY_AABBS_DESC. |
D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLES |
Shares most fields with the basic triangle geometry type,D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC, but allows the geometry to link to an OMM Array. The basic triangle type and this OMM-enabled type geometries may be mixed in the same BLAS build. This is part of the Opacity Micromaps feature. |
D3D12_RAYTRACING_GEOMETRY_FLAGS
typedef enum D3D12_RAYTRACING_GEOMETRY_FLAGS
{
D3D12_RAYTRACING_GEOMETRY_FLAG_NONE = 0x0,
D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE = 0x1,
D3D12_RAYTRACING_GEOMETRY_FLAG_NO_DUPLICATE_ANYHIT_INVOCATION = 0x2,
} D3D12_RAYTRACING_GEOMETRY_FLAGS;
| Value | Definition |
|---|---|
D3D12_RAYTRACING_GEOMETRY_FLAG_NONE |
No options specified. |
D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE |
When rays encounter this geometry, the geometry acts as if no any hit shader is present. It is recommended to use this flag liberally, as it can enable important ray processing optimizations. Note that this behavior can be overridden on a per-instance basis with D3D12_RAYTRACING_INSTANCE_FLAGS and on a per-ray basis using Ray flags in TraceRay() and RayQuery::TraceRayInline(). |
D3D12_RAYTRACING_FLAG_NO_DUPLICATE_ANYHIT_INVOCATION |
<p>By default, the system is free to trigger an any hit shader more than once for a given ray-primitive intersection. This flexibility helps improve the traversal efficiency of acceleration structures in certain cases. For instance, if the acceleration structure is implemented internally with bounding volumes, the implementation may find it beneficial to store relatively long triangles in multiple bounding boxes rather than a larger single box.</p><p>However, some application use cases require that intersections be reported to the any hit shader at most once. This flag enables that guarantee for the given geometry, potentially with some performance impact.</p><p>This flag applies to all geometry types.</p> |
D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC
typedef struct D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC
{
D3D12_GPU_VIRTUAL_ADDRESS Transform3x4;
DXGI_FORMAT IndexFormat;
DXGI_FORMAT VertexFormat;
UINT IndexCount;
UINT VertexCount;
D3D12_GPU_VIRTUAL_ADDRESS IndexBuffer;
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE VertexBuffer;
} D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC;
The geometry pointed to by this struct are always in triangle list from (indexed or non-indexed form). Strips are not supported for simplicity.
| Member | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS Transform3x4 |
<p>Address of a 3x4 affine transform matrix in row major layout to be applied to the vertices in the VertexBuffer during an acceleration structure build. The contents of VertexBuffer are not modified. If a 2D vertex format is used, the transformation is applied with the third vertex component assumed to be zero.</p><p>If Transform is NULL the vertices will not be transformed. Using Transform may result in increased computation and/or memory requirements for the acceleration structure build.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. The address must be aligned to 16 bytes (D3D12_RAYTRACING_TRANSFORM3X4_BYTE_ALIGNMENT).</p> |
DXGI_FORMAT IndexFormat |
<p>Format of the indices in the IndexBuffer. Must be one of:</p><p>DXGI_FORMAT_UNKNOWN (when IndexBuffer is NULL)</p><p>DXGI_FORMAT_R32_UINT</p><p>DXGI_FORMAT_R16_UINT</p> |
DXGI_FORMAT VertexFormat |
<p>Format of the vertices (positions) in VertexBuffer. Must be one of:</p><p>DXGI_FORMAT_R32G32_FLOAT (third component assumed 0)</p><p>DXGI_FORMAT_R32G32B32_FLOAT</p><p>DXGI_FORMAT_R16G16_FLOAT (third component assumed 0)</p><p>DXGI_FORMAT_R16G16B16A16_FLOAT (A16 component is ignored, other data can be packed there, such as setting vertex stride to 6 bytes)</p><p>DXGI_FORMAT_R16G16_SNORM (third component assumed 0)</p><p>DXGI_FORMAT_R16G16B16A16_SNORM (A16 component is ignored, other data can be packed there, such as setting vertex stride to 6 bytes)</p><p>Tier 1.1 devices support the following additional formats:</p><p>DXGI_FORMAT_R16G16B16A16_UNORM (A16 component is ignored, other data can be packed there, such as setting vertex stride to 6 bytes)</p><p>DXGI_FORMAT_R16G16_UNORM (third component assumed 0)</p><p>DXGI_FORMAT_R10G10B10A2_UNORM (A2 component is ignored, stride must be 4 bytes)</p><p>DXGI_FORMAT_R8G8B8A8_UNORM (A8 component is ignored, other data can be packed there, such as setting vertex stride to 3 bytes)</p><p>DXGI_FORMAT_R8G8_UNORM (third component assumed 0)</p><p>DXGI_FORMAT_R8G8B8A8_SNORM (A8 component is ignored, other data can be packed there, such as setting vertex stride to 3 bytes)</p><p>DXGI_FORMAT_R8G8_SNORM (third component assumed 0)</p><p>The 4 component formats with ignored A* components were a way around having to introduce 3 component variants of these formats to the DXGI format list (and associated infrastructure) only for this scenario. So this just saved a minor mount of engineering work given too much work to do overall.</p> |
UINT IndexCount |
Number of indices in IndexBuffer. Must be 0 if IndexBuffer is NULL. |
UINT VertexCount |
Number of vertices (positions) in VertexBuffer. If an index buffer is present, this must be at least the maximum index value in the index buffer + 1. |
D3D12_GPU_VIRTUAL_ADDRESS IndexBuffer |
<p>Array of vertex indices. If NULL, triangles are non-indexed. Just as with graphics, the address must be aligned to the size of IndexFormat.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Note that if an app wants to share index buffer inputs between graphics input assembler and raytracing acceleration structure build input, it can always put a resource into a combination of read states simultaneously, e.g. D3D12_RESOURCE_STATE_INDEX_BUFFER | D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p> |
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE VertexBuffer |
<p> Array of vertices including a stride. The alignment on the address and stride must be a multiple of the component size, so 4 bytes for formats with 32bit components and 2 bytes for formats with 16bit components. There is no constraint on the stride (whereas there is a limit for graphics), other than that the bottom 32bits of the value are all that are used – the field is UINT64 purely to make neighboring fields align cleanly/obviously everywhere. Each vertex position is expected to be at the start address of the stride range and any excess space is ignored by acceleration structure builds. This excess space might contain other app data such as vertex attributes, which the app is responsible for manually fetching in shaders, whether it is interleaved in vertex buffers or elsewhere.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Note that if an app wants to share vertex buffer inputs between graphics input assembler and raytracing acceleration structure build input, it can always put a resource into a combination of read states simultaneously, e.g. D3D12_RESOURCE_STATE_VERTEX_AND_CONSTANT_BUFFER | D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p> |
D3D12_RAYTRACING_GEOMETRY_AABBS_DESC
typedef struct D3D12_RAYTRACING_GEOMETRY_AABBS_DESC
{
UINT64 AABBCount;
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE AABBs;
} D3D12_RAYTRACING_GEOMETRY_AABBS_DESC;
| Member | Definition |
|---|---|
UINT AABBCount |
Number of AABBs pointed to in the contiguous array at AABBs. |
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE AABBs |
<p>D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE describing the GPU memory location where an array of AABB descriptions is to be found, including the data stride between AABBs. The address and stride must each be aligned to 8 bytes (D3D12_RAYTRACING_AABB_BYTE_ALIGNMENT).</p><p>The stride can be 0.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p> |
D3D12_RAYTRACING_AABB
typedef struct D3D12_RAYTRACING_AABB
{
FLOAT MinX;
FLOAT MinY;
FLOAT MinZ;
FLOAT MaxX;
FLOAT MaxY;
FLOAT MaxZ;
} D3D12_RAYTRACING_AABB;
| Member | Definition |
|---|---|
FLOAT MinX, MinY, MinZ |
The minimum X, Y and Z coordinates of the box. |
FLOAT MaxX, MaxY, MaxZ |
The maximum X, Y and Z coordinates of the box. |
D3D12_RAYTRACING_INSTANCE_DESC
typedef struct D3D12_RAYTRACING_INSTANCE_DESC
{
FLOAT Transform[3][4];
UINT InstanceID : 24;
UINT InstanceMask : 8;
UINT InstanceContributionToHitGroupIndex : 24;
UINT Flags : 8;
D3D12_GPU_VIRTUAL_ADDRESS AccelerationStructure;
} D3D12_RAYTRACING_INSTANCE_DESC;
This data structure is used in GPU memory during acceleration structure build. This C++ struct definition is useful if generating instance data on the CPU first then uploading to the GPU. But apps are also free to generate instance descriptions directly into GPU memory from compute shaders for instance, following the same layout.
For a GPU-driven alternative with per-instance explicit AABBs, partition assignment, and support for partial updates, see D3D12_RTAS_PARTITIONED_TLAS_OPERATION_WRITE_INSTANCE_ARGS in the Partitioned TLAS feature.
| Member | Definition |
|---|---|
FLOAT Transform[3][4] |
A 3x4 transform matrix in row major layout representing the instance-to-world transformation. Implementations transform rays, as opposed to transforming all the geometry/AABBs. |
UINT InstanceID |
An arbitrary 24-bit value that can be accessed via InstanceID() in shader types listed in System value intrinsics. |
UINT InstanceMask |
An 8-bit mask assigned to the instance, which can be used to include/reject groups of instances on a per-ray basis. See the InstanceInclusionMask parameter in TraceRay() and RayQuery::TraceRayInline(). If the value is zero, the instance will never be included, so typically this should be set to some nonzero value. |
UINT InstanceContributionToHitGroupIndex |
Per-instance contribution to add into shader table indexing to select the hit group to use. The indexing behavior is introduced here: Indexing into shader tables, detailed here: Addressing calculations within shader tables, and visualized here: Ray-geometry interaction diagram. Has no behavior with inline raytracing, however the value is still available to fetch from a RayQuery object for shaders use manually for any purpose. |
UINT Flags |
Flags from D3D12_RAYTRACING_INSTANCE_FLAGS to apply to the instance. |
D3D12_GPU_VIRTUAL_ADDRESS AccelerationStructure |
<p>Address of the bottom-level acceleration structure that is being instanced. The address must be aligned to 256 bytes (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), which is a somewhat redundant requirement as any existing acceleration structure passed in here would have already been required to be placed with such alignment anyway.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p> |
D3D12_RAYTRACING_INSTANCE_FLAGS
typedef enum D3D12_RAYTRACING_INSTANCE_FLAGS
{
D3D12_RAYTRACING_INSTANCE_FLAG_NONE = 0x0,
D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE = 0x1,
D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_FRONT_COUNTERCLOCKWISE =0x2,
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OPAQUE = 0x4,
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_NON_OPAQUE = 0x8
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OMM_2_STATE = 0x10,
D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS = 0x20,
} D3D12_RAYTRACING_INSTANCE_FLAGS;
| Value | Definition |
|---|---|
D3D12_RAYTRACING_INSTANCE_FLAG_NONE |
No options specified. |
D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE |
Disables front/back face culling for this instance. The Ray flags RAY_FLAG_CULL_BACK_FACING_TRIANGLES and RAY_FLAG_CULL_FRONT_FACING_TRIANGLES will have no effect on this instance. RAY_FLAG_SKIP_TRIANGLES takes precedence however - if that flag is set, then D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE has no effect, and all triangles will be skipped. |
D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_FRONT_COUNTERCLOCKWISE |
<p> This flag reverses front and back facings, which is useful if for example, the application’s natural winding order differs from the default (described below).</p><p>By default, a triangle is front facing if its vertices appear clockwise from the ray origin and back facing if its vertices appear counter-clockwise from the ray origin, in object space in a left-handed coordinate system.</p><p>Since these winding direction rules are defined in object space, they are unaffected by instance transforms. For example, an instance transform matrix with negative determinant (e.g. mirroring some geometry) does not change the facing of the triangles within the instance. Per-geometry transforms, by contrast, (defined in D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC), get combined with the associated vertex data in object space, so a negative determinant matrix there does flip triangle winding.</p> |
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OPAQUE |
<p>The instance will act as if D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE had been specified for all the geometries in the bottom-level acceleration structure referenced by the instance. Note that this behavior can be overridden by the ray flag RAY_FLAG_FORCE_NON_OPAQUE.</p><p>Mutually exclusive to the D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_NON_OPAQUE flag.</p> |
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_NON_OPAQUE |
<p>The instance will act as if D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE had not been specified for any of the geometries in the bottom-level acceleration structure referenced by the instance. Note that this behavior can be overridden by the ray flag RAY_FLAG_FORCE_OPAQUE.</p><p>Mutually exclusive to the D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OPAQUE flag.</p> |
D3D12_RAYTRACING_INSTANCE_FLAG_FORCE_OMM_2_STATE |
Ignore the Unknown state and only consider the Transparent/Opaque bit for all 4-state Opacity Micromaps encountered during traversal. This flag has no effect if D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS is set. This is part of the Opacity Micromaps feature. |
D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS |
Disable Opacity Micromaps for all triangles, and revert to using geometry opaque/non-opaque state instead (original behavior). This flag is only valid if the referenced BLAS was built with the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DISABLE_OMMS flag. Omitting the flag during BLAS build will result in undefined behavior. This is part of the Opacity micromaps feature. |
D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC
typedef struct D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC
{
const D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC* pTriangles;
const D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC* pOmmLinkage;
} D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC;
Geometry triangle descriptor accompanied by a mapping to opacity micromaps.
| Member | Definition |
|---|---|
const D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC* pTriangles |
Pointer to triangle mesh descriptor. See D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC. |
const D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC pOmmLinkage |
Pointer to data to map triangles to OMM data. See D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC. |
The reason the members are pointers is to keep the size of D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC from exceeding the other pre-existing structs in the union within D3D12_RAYTRACING_GEOMETRY_DESC. This tradeoff in extra complexity to use Opacity Micromaps avoided the larger complexity of having to make an API breaking change to version the container structs and corresponding APIs. Technically the contents of pOmmLinkage could have been inlined here, but the thinking is it could be handy to combine separately tracked OMM linkage desc and triangles desc.
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC
typedef struct D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC
{
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE OpacityMicromapIndexBuffer;
DXGI_FORMAT OpacityMicromapIndexFormat;
UINT OpacityMicromapBaseLocation;
D3D12_GPU_VIRTUAL_ADDRESS OpacityMicromapArray;
} D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC;
Descriptor of opacity micromap data to be paired with separate triangle data.
| Member | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE OpacityMicromapIndexBuffer |
<p>Buffer specifying which OMM index to use for each triangle. Some values have special meaning and are used to encode OMMs with uniform state (see D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX). This input is optional. If NULL, there is a 1:1 mapping between input triangles and OMM Array entries, as long as the OMM Array has at least as many entries as the number of triangles + OpacityMicromapBaseLocation. For BLAS updates, this input buffer must match that of the original build if the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE build flag is cleared.</p><p>The memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Address and stride must be aligned to the index format size.</p> |
DXGI_FORMAT OpacityMicromapIndexFormat |
Format of OpacityMicromapIndexBuffer. Can be DXGI_FORMAT_R32_UINT, DXGI_FORMAT_R16_UINT, DXGI_FORMAT_R8_UINT or DXGI_FORMAT_UNKNOWN (no index buffer used). |
UINT OpacityMicromapBaseLocation |
Constant added to all non-uniform OMM indices in OpacityMicromapIndexBuffer. For the non-indexed case it also offsets the range of entries used in an OMM Array. |
D3D12_GPU_VIRTUAL_ADDRESS OpacityMicromapArray |
<p>Pointer to an OMM Array used by this geometry. May be set to NULL if no non-uniform OMMs are used. Unlike vertex, index, and transform buffers, this resource is dereferenced during raytracing.</p><p>The memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p> |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX
typedef enum D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX
{
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_TRANSPARENT = -1,
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_OPAQUE = -2,
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_UNKNOWN_TRANSPARENT = -3,
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_UNKNOWN_OPAQUE = -4,
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_CLUSTER_SKIP_OMM = -5,
} D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX;
If a triangle has a uniform OMM state in a BLAS build, it is preferable to signal this explicitly, rather than linking to single state Opacity Micromap.
This can be accomplished by supplying these special indices as entries in OpacityMicromapIndexBuffer, in D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC.
| Value | Definition |
|---|---|
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_TRANSPARENT |
Uniform transparent OMM state. |
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_OPAQUE |
Uniform opaque OMM state. |
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_UNKNOWN_TRANSPARENT |
Uniform unknown-transparent OMM state. |
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_FULLY_UNKNOWN_OPAQUE |
Uniform unknown-opaque OMM state. |
D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_CLUSTER_SKIP_OMM |
Don’t apply OMM for triangle. Reverts to using the geometry supplied opaque/non-opaque state. This special index is only allowed with clustered geometry in cluster or cluster template builds for OMM indices passed into the OpacityMicromapIndexBuffer field of D3D12_RTAS_OPERATION_BUILD_CLAS_FROM_TRIANGLES_ARGS. This is necessary for clusters because with non-cluster BLAS one can disable OMM by having a geometry without OMMs, but with clusters this is not possible (as OMM are not per-geometry but per-cluster) so there needs to be a way to disable OMM per triangle. This state does not require the AS to be built with D3D12_RTAS_CLUSTER_OPERATION_CLAS_FLAG_ALLOW_DISABLE_OMMS, as that only applies ot the instance flag. |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC
typedef struct D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC
{
UINT NumOmmHistogramEntries;
const D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY* pOmmHistogram;
D3D12_GPU_VIRTUAL_ADDRESS InputBuffer;
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE PerOmmDescs;
} D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC;
Input structure to OMM Array construction. Individual OMMs are accessed via indices when used in BLAS construction.
| Member | Definition |
|---|---|
UINT NumOmmHistogramEntries |
Number of OMM histogram entries in the pOmmHistogram array. |
const D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY* pOmmHistogram |
Counts for each subdivision level and format combination across all the OMM entries in the build. See D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY. |
D3D12_GPU_VIRTUAL_ADDRESS InputBuffer |
<p>Address for raw OMM input data. Must be 128-byte aligned. It is recommended to try to organize OMMs together in memory that are expected to be used close together spatially.</p><p>The memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p> |
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE PerOmmDescs |
<p>GPU array with one D3D12_RAYTRACING_OPACITY_MICROMAP_DESC entry per OMM.</p><p>The memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. The address and stride must be 4 byte aligned.</p> |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT
typedef enum D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT
{
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_2_STATE = 0x1,
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_4_STATE = 0x2,
} D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT;
Specifies the input opacity micromap formats. The OC1 (Opacity Compression 1) format follows the space-filling curve listed in the Opacity Micromap encoding section.
| Value | Definition |
|---|---|
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_2_STATE |
2-state (Transparent/Opaque) format. |
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT_OC1_4_STATE |
4-state (Transparent/Opaque, Known/Unknown) format. |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY
typedef struct D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY
{
UINT Count;
UINT SubdivisionLevel;
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT Format;
} D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY;
Number of OMMs of a specific configuration in an OMM Array. Used to compute conservative buffer size estimates for OMM Array builds.
| Member | Definition |
|---|---|
UINT Count |
Total number of OMMs in the OMM Array with the particular SubdivisionLevel and Format specified in this descriptor. |
UINT SubdivisionLevel |
Number of subdivisions for the OMM. Valid inputs are [0, 12] (see D3D12_RAYTRACING_OPACITY_MICROMAP_OC1_MAX_SUBDIVISION_LEVEL). The total number of micro-triangles is 4SubdivisionLevel. |
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT Format |
Opacity micromap format. Note that this is a 32-bit integer. |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_DESC
typedef struct D3D12_RAYTRACING_OPACITY_MICROMAP_DESC
{
UINT ByteOffset;
UINT SubdivisionLevel : 16;
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT Format : 16;
} D3D12_RAYTRACING_OPACITY_MICROMAP_DESC;
Describes one opacity micromap.
| Member | Definition |
|---|---|
UINT ByteOffset |
Byte offset from the InputBuffer, specified in the input D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC struct, to where the input OMM data is located. |
UINT SubdivisionLevel : 16 |
Number of subdivisions for the OMM. Valid inputs are [0, 12] (see D3D12_RAYTRACING_OPACITY_MICROMAP_OC1_MAX_SUBDIVISION_LEVEL). The total number of micro-triangles is 4SubdivisionLevel. |
D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT Forma : 16 |
Format of the OMM of type D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT. Note that this is a 16-bit integer. |
This is part of the Opacity Micromaps feature.
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE
enum D3D12_RAYTRACING_OPACITY_MICROMAP_STATE : uint
{
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_TRANSPARENT = 0,
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_OPAQUE = 1,
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_TRANSPARENT = 2,
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_OPAQUE = 3,
} D3D12_RAYTRACING_OPACITY_MICROMAP_STATE;
Opacity Micromap micro-triangle states. Defines the entries within an Opacity Micromap, so not part of any APU input, just listed here for convenience.
| Value | Definition |
|---|---|
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_TRANSPARENT |
Transparent OMM state. Hit is ignored. |
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_OPAQUE |
Opaque OMM state. Hit is committed. |
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_TRANSPARENT |
Unknown-transparent OMM state. If operating in 4-state mode, invoke any-hit shader. If operating in 2-state mode, ignore hit. |
D3D12_RAYTRACING_OPACITY_MICROMAP_STATE_UNKNOWN_OPAQUE |
Unknown-opaque OMM state. If operating in 4-state mode, invoke any-hit shader. If operating in 2-state mode, commit the hit. |
This is part of the Opacity Micromaps feature. Also see Opacity Micromap encoding.
D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE
typedef struct D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE
{
D3D12_GPU_VIRTUAL_ADDRESS StartAddress;
UINT64 StrideInBytes;
} D3D12_GPU_VIRTUAL_ADDRESS_AND_STRIDE;
| Member | Definition |
|---|---|
UINT64 StartAddress |
Beginning of a VA range. |
UINT64 StrideInBytes |
Defines indexing stride, such as for vertices. Only the bottom 32 bits get used. The field is 64 bits purely to make alignment of containing structures clean/obvious everywhere. |
EmitRaytracingAccelerationStructurePostbuildInfo
void EmitRaytracingAccelerationStructurePostbuildInfo(
_In_ const D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC* pDesc,
_In_ UINT NumSourceAccelerationStructures,
_In_reads_( NumSourceAccelerationStructures ) const D3D12_GPU_VIRTUAL_ADDRESS*
pSourceAccelerationStructureData);
Emits post-build properties for a set of acceleration structures. This enables applications to know the output resource requirements for performing acceleration structure operations via CopyRaytracingAccelerationStructure().
Can be called on graphics or compute command lists but not from bundles.
For CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS, only the
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATIONand_TOOLS_VISUALIZATIONinfo types are supported (sized for use with the corresponding_SERIALIZE/_DESERIALIZEand_VISUALIZATION_DECODE_FOR_TOOLSmodes of CopyRaytracingAccelerationStructure())._COMPACTED_SIZEand_CURRENT_SIZEdo not apply; for current-size queries on these objects, useD3D12_RTAS_OPERATION_MODE_GET_SIZESof ExecuteIndirectRTASOperations() instead. Compaction is not a supported operation on these objects (see Why compaction doesn’t apply to clustered geometry).
| Parameter | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC* pDesc |
Description of postbuild information to generate. |
UINT NumSourceAccelerationStructures |
Number of pointers to acceleration structure GPUVAs pointed to by pSourceAccelerationStructureData. This number also affects the destination (output), which will be a contiguous array of NumSourceAccelerationStructures output structures, where the type of the structures depends on InfoType. |
const D3D12_GPU_VIRTUAL_ADDRESS* pSourceAccelerationStructureData |
<p>Pointer to array of GPUVAs of size NumSourceAccelerationStructures. Each GPUVA points to the start of an existing acceleration structure, which is aligned to 256 bytes (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT).</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p><p>For Cluster BLAS, when pDesc->InfoType is D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION or _TOOLS_VISUALIZATION, all referenced CLAS must be valid for the duration of the operation on the GPU timeline (consistent with the corresponding _SERIALIZE and _VISUALIZATION_DECODE_FOR_TOOLS modes of CopyRaytracingAccelerationStructure()).</p> |
EmitRaytracingAccelerationStructurePostbuildInfo Structures
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC
{
D3D12_GPU_VIRTUAL_ADDRESS DestBuffer;
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE InfoType;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_DESC;
Description of the postbuild information to generate from an acceleration structure. This is used by both EmitRaytracingAccelerationStructurePostbuildInfo() and optionally by BuildRaytracingAccelerationStructure().
| Member | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS DestBuffer |
<p>Result storage. Size required and the layout of the contents written by the system depend on InfoType.</p><p>The memory pointed to must be in state D3D12_RESOURCE_STATE_UNORDERED_ACCESS. The memory must be aligned to the natural alignment for the members of the particular output structure being generated (e.g. 8 bytes for a struct with the largest membes being UINT64).</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE InfoType |
Type of postbuild information to retrieve. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE
typedef enum D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE = 0x0,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION = 0x1,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION = 0x2,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE = 0x3,
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE;
| Member | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE |
Space requirements for an acceleration structure or Opacity Micromap Array after compaction. See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC. Applies to TLAS, BLAS and Opacity Micromap Arrays. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION |
Space requirements for generating tools visualization for an acceleration structure or Opacity Micromap Array (used by tools). See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION_DESC. Applies to TLAS, BLAS, Opacity Micromap Arrays, CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION |
Space requirements for serializing an acceleration structure or Opacity Micromap Array. See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC. Applies to TLAS, BLAS, Opacity Micromap Arrays, CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE |
Size of the current acceleration structure or Opacity Micromap Array. See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE_DESC. Applies to TLAS, BLAS and Opacity Micromap Arrays only. For CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS, use the D3D12_RTAS_OPERATION_MODE_GET_SIZES mode of ExecuteIndirectRTASOperations() instead. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC
{
UINT64 CompactedSizeInBytes;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE_DESC;
| Member | Definition |
|---|---|
UINT64 CompactedSizeInBytes |
<p>Space requirement for acceleration structure or Opacity Micromap Array after compaction.</p><p>It is guaranteed that a compacted acceleration structure doesn’t consume more space than a non-compacted acceleration structure.</p><p>Pre-compaction, it is guaranteed that the size requirements reported by GetRaytracingAccelerationStructurePrebuildInfo() for a given build configuration (triangle counts etc.) will be sufficient to store any acceleration structure whose build inputs are reduced (e.g. reducing triangle counts). This is discussed in GetRaytracingAccelerationStructurePrebuildInfo(). This non-increasing property for smaller builds does not apply post-compaction, however. In other words, it is not guaranteed that having fewer items in an acceleration structure means it compresses to a smaller size than compressing an acceleration structure with more items.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION_DESC
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION_DESC
{
UINT64 DecodedSizeInBytes;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TOOLS_VISUALIZATION_DESC;
| Member | Definition |
|---|---|
UINT64 DecodedSizeInBytes |
Space requirement for decoding an acceleration structure or Opacity Micromap array into a form that can be visualized by tools. |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC
{
UINT64 SerializedSizeInBytes;
union
{
UINT64 NumBottomLevelAccelerationStructurePointers; // UINT64 to align arrays of this struct
UINT64 NumBottomLevelAccelerationStructureHeaderAndPointerListPairs;
};
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC;
| Member | Definition |
|---|---|
UINT64 SerializedSizeInBytes |
Size of the serialized acceleration structure, including a header, D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1, and header postamble data (described by the header), and the actual acceleration structure data. For top level acceleration structures, the header postamble is a list of pointers to bottom-level acceleration structures. For bottom-level acceleration structures, the header postable is an array of pairs: {D3D12_RAYTRACING_SERIALIZED_BLOCK, list of pointers the described block type}, if needed (e.g. to describe pointers to OMM arrays if used). |
UINT64 NumBottomLevelAccelerationStructurePointers |
<p>This union entry only applies for top level acceleration structures. How many 64bit GPUVAs will be at the start of the serialized acceleration structure (after D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1). For a top-level acceleration structure, the pointers indicate the acceleration structures being referred to.</p><p>When deserializing happens, these pointers to bottom level pointers must be initialized by the app in the serialized data (just after the header) to the new locations where the bottom level acceleration structures will reside. These new locations pointed to at deserialize time need not have been populated with bottom-level acceleration structures yet, as long as they have been initialized with the expected deserialized data structures before use in raytracing. During deserialization, the driver reads the new pointers, using them to produce an equivalent top-level acceleration structure to the original.</p> |
UINT64 NumBottomLevelAccelerationStructureHeaderAndPointerListPairs |
<p>This union entry applies for bottom level, cluster level, clustered bottom-level, partitioned top-level acceleration structures and cluster template objects. How many sets {D3D12_RAYTRACING_SERIALIZED_BLOCK, list of pointers the described block type} will be at the start of the serialized acceleration structure (after D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1). This could be 0 if no additional blocks are needed, such as no use of Opacity Micromap arrays.</p><p>When deserializing happens, this additional block information must be initialized by the app in the serialized data (just after the header) to the new locations where the specified data (e.g. Opacity Micromap arrays) will reside. The list of entries includes at least entries that actually have objects linked to them. But also some devices the list will be interspersed with null entries for entries that don’t have objects linked, while other devices may prune out the null entries. Consumers of the list must simply ignore null entries, if any. Non null locations pointed to at deserialize time need not have been populated with data (e.g. Opacity Micromap arrays) yet, as long as they have been initialized with the expected deserialized data structures before use in raytracing or template instantiation. During deserialization, the driver reads the new pointers, using them to produce an equivalent acceleration structure to the original.</p> |
The Num* fields are arguably not necessary for an app to look at out of postbuild info. The same information, with more detail, is available after serialization in D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1).
For Opacity Micromap arrays being serialized, the Num* don’t apply and are 0.
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE_DESC
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE_DESC
{
UINT64 CurrentSizeInBytes;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_CURRENT_SIZE_DESC;
| Member | Definition |
|---|---|
UINT64 CurrentSizeInBytes** |
<p>Space used by current acceleration structure or OMM array. If the acceleration structure hasn’t had a compaction operation performed on it, this size is the same one reported by GetRaytracingAccelerationStructurePrebuildInfo(), and if it has been compacted this size is the same reported for postbuild info with D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE.</p><p>While this appears redundant to other ways of querying sizes, this one can be handy for tools to be able to determine how much memory is occupied by an arbitrary acceleration structure sitting in memory.</p> |
CopyRaytracingAccelerationStructure
void CopyRaytracingAccelerationStructure(
_In_ D3D12_GPU_VIRTUAL_ADDRESS DestAccelerationStructureData,
_In_ D3D12_GPU_VIRTUAL_ADDRESS SourceAccelerationStructureData,
_In_ D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE Mode);
Since raytracing acceleration structures may contain internal pointers and have a device dependent opaque layout, copying them around or otherwise manipulating them requires a dedicated API so that drivers can handle the requested operation. This API takes a source acceleration structure and copies it to destination memory while applying the transformation requested by the Mode parameter.
Can be called on graphics or compute command lists but not from bundles.
For CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS, only the
_SERIALIZE,_DESERIALIZEand_VISUALIZATION_DECODE_FOR_TOOLSmodes of D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE are supported._CLONEand_COMPACTdo not apply; for cluster objects, use D3D12_RTAS_OPERATION_TYPE_MOVE_CLUSTER_OBJECTS of ExecuteIndirectRTASOperations() to copy or move them.
| Parameter | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS DestAccelerationStructureData |
<p>Destination memory. Required size can be discovered by calling EmitRaytracingAccelerationStructurePostbuildInfo() beforehand, if necessary depending on the Mode.</p><p>Destination address must be 256 byte aligned (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT), regardless of the Mode.</p><p> Destination memory range cannot overlap source otherwise results are undefined.</p><p>The resource state that the memory pointed to must be in depends on the Mode parameter - see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE definitions.</p> |
D3D12_GPU_VIRTUAL_ADDRESS SourceAccelerationStructureData |
<p> Acceleration structure or other type of data to copy/transform based on the specified Mode. The data remains unchanged and usable (such as if it is an acceleration structure). The operation only involves the data pointed to (such as acceleration structure) and not any other data (such as acceleration structures) it may point to. E.g. in the case of a top-level acceleration structure, any bottom-level acceleration structures that it points to are not involved in the operation. Exception: for Cluster BLAS in _SERIALIZE or _VISUALIZATION_DECODE_FOR_TOOLS, referenced CLAS may be read by the driver and therefore must be valid for the duration of the operation on the GPU timeline.</p><p>Memory must be 256 byte aligned (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT), regardless of Mode.</p><p>The resource state that the memory pointed to must be in depends on the Mode parameter - see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE definitions.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE Mode |
Type of copy operation to perform. See D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE. |
CopyRaytracingAccelerationStructure Structures
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE
typedef enum D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_CLONE = 0x0,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_COMPACT = 0x1,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS = 0x2,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_SERIALIZE = 0x3,
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_DESERIALIZE = 0x4
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE;
| Value | Definition |
|---|---|
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_CLONE |
<p>Copy an acceleration structure or Opacity Micromap array while fixing up any self-referential pointers that may be present so that the destination is a self-contained match for the source. Any external pointers to other acceleration structures remain unchanged from source to destination in the copy. The size of the destination is identical to the size of the source.</p><p>The source and destination memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p><p>The destination and source memory addresses must be be 256-byte aligned (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT).</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_COMPACT |
<p>Similar to the clone mode, producing a functionally equivalent acceleration structure to source in the destination. Compact mode also fits the destination into a potentially smaller memory footprint (certainly no larger). The size required for the destination can be retrieved beforehand from EmitRaytracingAccelerationStructurePostbuildInfo().</p><p>This mode is only valid if the source acceleration structure was originally built with the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_COMPACTION flag, otherwise results are undefined.</p><p>The source and destination memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p><p>The destination and source memory addresses must be be 256-byte aligned, see D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT, or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT).</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS |
<p>Destination takes the layout described in D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER. The size required for the destination can be retrieved beforehand from EmitRaytracingAccelerationStructurePostbuildInfo().</p><p>This mode is intended for tools such as PIX only, though nothing stops any app from using it. The output is essentially the inverse of an acceleration structure or Opacity Micromap array build and is self-contained in the destination buffer.</p><p>For top-level acceleration structures, the output includes a set of instance descriptions that are identical to the data used in the original build and in the same order.</p><p>For bottom-level acceleration structures, the output includes a set of geometry descriptions roughly matching the data used in the original build. The output is only a rough match for the original in part because of the tolerances allowed in the specification for acceleration structures, and in part because reporting exactly the same structure as is conceptually encoded may not be simple.</p><p>AABBs returned for procedural primitives, for instance, could be more conservative (larger) in volume and even different in number than what is actually in the acceleration structure representation (because it may not be clean to expose the exact representation).</p><p>Geometries (each with its own geometry description) must appear in the same order as in the original build, as shader table indexing calculations depends on this.</p><p>For BLAS with type D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLES, all fields in the D3D12_RAYTRACING_GEOMETRY_DESC.OmmTriangles.pOmmLinkage including OpacityMicromapIndexBuffer can be modified vs original input but the OMM assigned through the entry in OpacityMicromapIndexBuffer is compatible with the original OMM for every triangle. Compatible means the OMM yields the same state (transparent, opaque, unknown transparent or unknown opaque) at any point of the triangle. The exception is special index cannot be replaced by regular index into OMM array, or vice versa, even if content uniformly matches the state implied by the special index.</p><p>For Opacity Micromap arrays the output is a lossless representation of original input expressed as a D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC after the header, with pOmmHistogram as a GPUVA within the result memory buffer rather than CPU pointer. The implementation is allowed to return PerOmmDescs descriptor fields ByteOffset, SubdivisionLevel, Format different as long as related OMM data in InputBuffer together with the descriptor is compatible with the original input. Again, the reason for that is implementation may up-convert some OMMs to higher SubdivisionLevel or promote 2-state to 4-state vs the original format.</p><p> The pOmmHistogram contents are necessary for the caller to be able to understand the size of data pointed to by InputBuffer (there isn’t an explicit size parameter). For BLAS with type D3D12_RAYTRACING_GEOMETRY_TYPE_OMM_TRIANGLES, the D3D12_RAYTRACING_GEOMETRY_DESC.OmmTriangles member (D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC) has its CPU pointer members reinterpreted as GPUVAs within the result memory buffer.</p><p>For Raytracing2 acceleration structure types, the visualization payload includes Raytracing2-specific build input data and returned operation arguments as described in D3D12_RTAS_TOOLS_VISUALIZATION_BUILD_INPUTS_HEADER.</p><p> These visualization structures overalll are sufficient for tools/PIX to be able to give the application some visual sense of the acceleration structure the driver made out of the app’s input. Visualization can help reveal driver bugs in acceleration structures if what is shown grossly mismatches the data the application used to create the acceleration structure, beyond allowed tolerances.</p><p>The source memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p><p>The destination memory must be in state D3D12_RESOURCE_STATE_UNORDERED_ACCESS.</p><p>The destination and source memory addresses must be be 256-byte aligned (D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT), or 128 bytes for Opacity Micromap arrays (D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT).</p><p>For Cluster BLAS, the referenced CLAS must be valid for the duration of the operation on the GPU timeline (the visualization decode reads through CLAS to reconstruct cluster geometry). See also the SourceAccelerationStructureData parameter exception above.</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_SERIALIZE |
<p>Destination takes the layout and size described in the documentation for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC, itself a struct generated via EmitRaytracingAccelerationStructurePostbuildInfo().</p><p>This mode serializes an acceleration structure or Opacity Micromap array so that an app or tools/PIX can store it to a file for later reuse, typically on a different device instance, via deserialization.</p><p>The source memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p><p>The destination memory must be in state D3D12_RESOURCE_STATE_UNORDERED_ACCESS.</p><p>When serializing a top-level acceleration structure the bottom-level acceleration structures it refers to do not have to still be present/intact in memory. Likewise bottom-level acceleration structures can be serialized independent of whether any top-level acceleration structures are pointing to them. Opacity Micromap arrays can be independently serialized as well. Said another way, order of serialization of acceleration structures or OMM arrays doesn’t matter.</p><p>Cluster BLAS are an exception to the source-liveness rule above: serializing a Cluster BLAS reads the referenced CLAS, so all referenced CLAS must be valid for the duration of the operation on the GPU timeline. This does not affect deserialization order — the Cluster-BLAS-to-CLAS reference relationship rewires at trace time, the same way TLAS-to-BLAS pointers do under the rule above. See also the SourceAccelerationStructureData parameter exception in CopyRaytracingAccelerationStructure().</p> |
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_DESERIALIZE |
<p>Source must be a serialized acceleration structure, with any pointers (directly after the header) fixed to point to their new locations, as discussed in the D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC section.</p><p>Destination gets an acceleration structure that is functionally equivalent to the acceleration structure that was originally serialized. It does not matter what order top-level and bottom-level acceleration structures (that the top-level refers to) are deserialized, as long as by the time a top-level acceleration structure is used for raytracing or acceleration structure updates it’s referenced bottom-level acceleration structures are present.</p><p>Deserialize only works on the same device and driver version otherwise results are undefined. This isn’t intended to be used for caching acceleration structures, as running a full acceleration structure build is likely to be faster than loading one from disk.</p><p>While intended for tools/PIX, nothing stops any app from using this.</p><p>The source memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</p><p>The destination memory must be in state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE.</p> |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER
This struct is no longer needed. D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1 replaces it in a backward compatible way. The new struct makes the safe the assumption that the UINT64 NumBottomLevelAccelerationStructurePointersAfterHeader field in this old struct would never have needed more than 32 bits to store a count. Thus the new struct repurposes the top 32 bits to be an enum field, where the new enum would be set to 0 in any scenario that needs to be backwards compatible with this old struct.
typedef struct D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER
{
D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER DriverMatchingIdentifier;
UINT64 SerializedSizeInBytesIncludingHeader;
UINT64 DeserializedSizeInBytes;
UINT64 NumBottomLevelAccelerationStructurePointersAfterHeader;
} D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER;
Header for a serialized top level raytracing acceleration structure.
| Member | Definition |
|---|---|
D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER DriverMatchingIdentifier |
See D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER. |
UINT64 SerializedSizeInBytesIncludingHeader |
Size of serialized data. |
UINT64 DeserializedSizeInBytes |
Size that will be consumed when deserialized. This is less than or equal to the size of the original acceleration structure before it was serialized. |
UINT64 NumBottomLevelAccelerationStructurePointersAfterHeader |
Size of the array of D3D12_GPU_VIRTUAL_ADDRESS values that follow the header. See discussion in D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC, which also reports the same count and explains what to do with these pointers. |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1
typedef struct D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1
{
D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER DriverMatchingIdentifier;
UINT64 SerializedSizeInBytesIncludingHeader;
UINT64 DeserializedSizeInBytes;
union
{
UINT NumBottomLevelAccelerationStructurePointersAfterHeader;
UINT NumBlocks;
};
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE HeaderPostambleType;
} D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1;
Header for a serialized top or bottom-level acceleration structure which may or may not reference additional blocks. Also used for serialized OMM arrays, with no additional blocks in this case.
Similar to how BLAS pointers are passed in to TLAS deserialization as a list of VAs, blocks such as references to Opacity Micromap Arrays by a BLAS are listed after the header.
The number of blocks is specified by NumBlocks.
For each block type, one D3D12_RAYTRACING_SERIALIZED_BLOCK entry with array of pointers of type D3D12_GPU_VIRTUAL_ADDRESS follows.
| Member | Definition |
|---|---|
D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER DriverMatchingIdentifier |
See D3D12_SERIALIZED_DATA_DRIVER_MATCHING_IDENTIFIER |
UINT64 SerializedSizeInBytesIncludingHeader |
Size of serialized data. |
UINT64 DeserializedSizeInBytes |
Size that will be consumed when deserialized. This is less than or equal to the size of the original acceleration structure before it was serialized. |
UINT64 NumBottomLevelAccelerationStructurePointersAfterHeader |
Size of the array of D3D12_GPU_VIRTUAL_ADDRESS values that follow the header. See discussion in D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC, which also reports the same count and explains what to do with these pointers. |
UINT64 NumBlocks |
Number of D3D12_RAYTRACING_SERIALIZED_BLOCK and pointer array pairs following this header. |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE HeaderPostambleType |
What type of extra information follows the header to complete the header before the main acceleration structure data. See D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE. D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_NONE (which doesn’t apply to TLAS) means the Num* union fields will be 0. D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BOTTOM_LEVEL_POINTERS (which applies to TLAS only) means that the NumBottomLevelAccelerationStructurePointersAfterHeader union field applies. D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BLOCKS means the NumBlocks union field applies. |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE
typedef enum D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE
{
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_NONE = 0,
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BOTTOM_LEVEL_POINTERS = 0,
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BLOCKS = 0xffffffff
} D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE;
| Enum | Definition |
|---|---|
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_NONE |
No post header data after D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1. The Num* union members will always be 0 (which thereby makes the header backwards compatible with the old D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1 that it replaces). This enum also intentionally uses the same enum value as D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BOTTOM_LEVEL_POINTERS for backwards compatibility, and given the Num* are 0, the meaning is identical. The NONE case applies, for instance, to BLAS with no OMMs linked by any of its geometries. Drivers can ignore this entry and just treat it as the _BOTTOM_LEVEL_POINTERS value (same enum value) in a switch statement, understanding that for non-TLAS the Num* will be 0 in this case. |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BOTTOM_LEVEL_POINTERS |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1 is followed by NumBottomLevelAccelerationStructurePointersAfterHeader (header member) pointers to bottom level acceleration structures, before the main serialized data. |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER_POSTAMBLE_TYPE_BLOCKS |
D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1 is followed by NumBlocks (header member) sets of { D3D12_RAYTRACING_SERIALIZED_BLOCK header, followed by associated list of data for that block type }. |
D3D12_RAYTRACING_SERIALIZED_BLOCK
typedef struct D3D12_RAYTRACING_SERIALIZED_BLOCK
{
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE Type;
UINT64 NumBlockPointersAfterHeader;
} D3D12_RAYTRACING_SERIALIZED_BLOCK;
Header for one block type.
This header struct is followed by NumBlockPointersAfterHeader pointers of type D3D12_GPU_VIRTUAL_ADDRESS with valid block resources (such as, for example, Opacity Micromap Arrays if Type is D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_OPACITY_MICROMAPS).
| Member | Definition |
|---|---|
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE Type |
Type of block. |
UINT64 NumBlockPointersAfterHeader |
Number of D3D12_GPU_VIRTUAL_ADDRESS entries following directly after this header. |
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE
typedef enum D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE
{
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_OPACITY_MICROMAPS = 0x0,
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_BOTTOM_LEVEL_ACCELERATION_STRUCTURE = 0x1,
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_CLUSTER_LEVEL_ACCELERATION_STRUCTURE = 0x2,
} D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE;
Type of block that will follow a D3D12_RAYTRACING_SERIALIZED_BLOCK header in a serialized BLAS.
| Value | Definition |
|---|---|
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_OPACITY_MICROMAPS |
Indicates that an array of OMM Array pointers follow the block header. The list of entries includes at least geometries that actually have OMMs linked to them. But also some devices the list will be interspersed with null entries for geometries that don’t have OMMs linked, while other devices may prune out the null entries. Consumers of the list must simply ignore null entries, if any. |
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_BOTTOM_LEVEL_ACCELERATION_STRUCTURE |
Indicates that an arry of bottom Level acceleration structure pointers follows the block header. Consumers of the list must simply ignore null entries, if any. |
D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE_CLUSTER_LEVEL_ACCELERATION_STRUCTURE |
Indicates that an arry of cluster Level acceleration structure pointers follows the block header. Consumers of the list must simply ignore null entries, if any. |
D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER
typedef struct D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER
{
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE Type;
UINT NumDescs;
} D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER;
// Depending on Type field, NumDescs above is followed by either:
// D3D12_RAYTRACING_INSTANCE_DESC InstanceDescs[NumDescs]
// or D3D12_RAYTRACING_GEOMETRY_DESC GeometryDescs[NumDescs]
// or D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC (NumDescs == 1 in this case)
// or Raytracing2 tools visualization data described in Raytracing2.md
// For D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC, the pOmmHistogram pointer becomes a GPUVA instead of CPU pointer
This describes the GPU memory layout of an acceleration structure visualization. It is a bit like the inverse of the inputs to an acceleration structure build, focused on simply the instance or geometry details depending on the acceleration structure type.
For Raytracing2 acceleration structure types, see D3D12_RTAS_TOOLS_VISUALIZATION_BUILD_INPUTS_HEADER.
SetPipelineState1
void SetPipelineState1(_In_ ID3D12StateObject* pStateObject);
Set a state object on the command list. Can be called from graphics or compute command lists and bundles.
This is an alternative to SetPipelineState(_In_ ID3D12PipelineState*)
which is only defined for graphics and compute shaders. There is only
one pipeline state active on a command list at a time, so either call
sets the current pipeline state. The distinction between the calls is
each sets particular types of pipeline state only. For now, at least,
SetPipelineState1 is only for setting raytracing pipeline state.
| Parameter | Definition |
|---|---|
ID3D12StateObject* pStateObject |
State object. For now this can only be of type: D3D12_STATE_OBJECT_TYPE_RAYTRACING_PIPELINE. |
DispatchRays
void DispatchRays(_In_ const D3D12_DISPATCH_RAYS_DESC* pDesc);
Launch threads of a ray generation shader. See Initiating raytracing for an overview. Can be called from graphics or compute command lists and bundles.
A raytracing pipeline state must be set on the command list otherwise behavior of this call is undefined.
There are 3 dimensions passed in to set the grid size: width/height/depth. These dimensions are constrained such that width*height*depth <= 2^30. Exceeding this produces undefined behavior.
If any grid dimension is 0, no threads are launched.
Tier 1.1 implementations also support GPU initiated DispatchRays() via ExecuteIndirect().
| Parameter | Definition |
|---|---|
const D3D12_DISPATCH_RAYS_DESC* pDesc |
Description of the ray dispatch. See D3D12_DISPATCH_RAYS_DESC. |
DispatchRays Structures
D3D12_DISPATCH_RAYS_DESC
typedef struct D3D12_DISPATCH_RAYS_DESC
{
D3D12_GPU_VIRTUAL_ADDRESS_RANGE RayGenerationShaderRecord;
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE MissShaderTable;
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE HitGroupTable;
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE CallableShaderTable;
UINT Width;
UINT Height;
UINT Depth;
} D3D12_DISPATCH_RAYS_DESC;
| Member | Definition |
|---|---|
D3D12_GPU_VIRTUAL_ADDRESS_RANGE RayGenerationShaderRecord |
Shader record for the Ray generation shader to use. Memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Address must be aligned to 64 bytes (D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT). |
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE MissShaderTable |
<p>Shader table for Miss shader. The stride is record stride, and must be aligned to 32 bytes (D3D12_RAYTRACING_SHADER_RECORD_BYTE_ALIGNMENT), and in the range [0…4096] bytes.</p><p>Memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Address must be aligned to 64 bytes(D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT).</p> |
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE HitGroupTable |
<p>Shader table for Hit Group. The stride is record stride, and must be aligned to 32 bytes (D3D12_RAYTRACING_SHADER_RECORD_BYTE_ALIGNMENT), and in the range [0…4096] bytes.</p><p> Memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Address must be aligned to 64 bytes (D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT).</p> |
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE CallableShaderTable |
<p> Shader table for Callable shaders. The stride is record stride, and must be aligned to 32 bytes (D3D12_RAYTRACING_SHADER_RECORD_BYTE_ALIGNMENT), and in the range [0…4096] bytes.</p><p>Memory must be in state D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE. Address must be aligned to 64 bytes (D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT).</p> |
UINT Width |
Width of ray generation shader thread grid. |
UINT Height |
Height of ray generation shader thread grid. |
UINT Depth |
Depth of ray generation shader thread grid. |
D3D12_GPU_VIRTUAL_ADDRESS_RANGE
typedef struct D3D12_GPU_VIRTUAL_ADDRESS_RANGE
{
D3D12_GPU_VIRTUAL_ADDRESS StartAddress;
UINT64 SizeInBytes;
} D3D12_GPU_VIRTUAL_ADDRESS_RANGE;
| Member | Definition |
|---|---|
UINT64 StartAddress |
Beginning of a VA range. |
UINT64 SizeInBytes |
Size of a VA range. |
D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE
typedef struct D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE
{
D3D12_GPU_VIRTUAL_ADDRESS StartAddress;
UINT64 SizeInBytes;
UINT64 StrideInBytes;
} D3D12_GPU_VIRTUAL_ADDRESS_RANGE_AND_STRIDE;
| Member | Definition |
|---|---|
UINT64 StartAddress |
Beginning of a VA range. |
UINT64 SizeInBytes |
Size of a VA range. |
UINT64 StrideInBytes |
Define record indexing stride within the memory range. |
ExecuteIndirect
void ID3D12CommandList::ExecuteIndirect(
ID3D12CommandSignature* pCommandSignature,
UINT MaxCommandCount,
ID3D12Resource* pArgumentBuffer,
UINT64 ArgumentBufferOffset,
ID3D12Resource* pCountBuffer,
UINT64 CountBufferOffset
);
This isn’t a raytracing specific API, just the generic D3D API for issuing indirect command execution.
What is relevant to raytracing is that ID3D12CommandSignature can be configured to support indirect calls to DispatchRays() - see CreateCommandSignature().
When a command signature configured for DispatchRays is passed to ExecuteIndirect, a raytracing pipeline state must be currently set on the command list otherwise behavior is undefined.
It is invalid for an application to modify the contents of shader tables from an ExecuteIndirect() call if that ExecuteIndirect() call references the same shader tables (e.g. via DispatchRays()).
ID3D12StateObjectProperties methods
ID3D12StateObjectProperties is an interface exported by ID3D12StateObject. The following methods are exposed from ID3D12StateObjectProperties:
GetShaderIdentifier
const void* GetShaderIdentifier(LPWSTR pExportName);
Retrieve the unique identifier for a shader that can be used in Shader records. This is only valid for Ray generation shaders, Hit groups, Miss shaders and Callable shaders. The state object can be a collection or raytracing pipeline state object, and the shader must not have any unresolved references or missing associations to required subobjects (in other words be fully compileable by a driver), otherwise nullptr is returned.
| Parameter | Definition |
|---|---|
LPWSTR pExportName |
Entrypoint in the state object for which to retrieve an identifier. |
Return value: const void* |
<p>Returns a pointer to the shader identifier.</p><p>The pointer and data pointed to are valid as long as the state object it came from is valid. The size of the data returned is D3D12_SHADER_IDENTIFIER_SIZE_IN_BYTES. Applications should retain this result to avoid the cost of searching for it in the state object if it will need to be retrieved many times. The place the identifier actually gets used is in shader records within shader tables in GPU memory, which it is up to the app to populate.</p><p>If the shader isn’t fully resolved in the state object, the return value is nullptr.</p> |
GetShaderStackSize
UINT64 GetShaderStackSize(LPCWSTR pExportName);
Retrieve the amount of stack memory required to invoke a raytracing shader in HLSL. Even ray generation shaders may return nonzero despite being at the bottom of the stack. See Pipeline stack for details on how this contributes to an app’s pipeline stack size calculation. This only needs to be called if the app wants to configure stack size via SetPipelineStackSize() rather than relying on the conservative default size,
This is only valid for Ray generation shaders, Hit groups, Miss shaders and Callable shaders.
For Hit groups, stack size must be queried for the individual shaders comprising it: Intersection shaders, Any hit shaders, Closest hit shaders, as each likely has a different stack size requirement. The stack size can’t be queried on these individual shaders directly, as the way they are compiled can be influenced by the overall hit group that contains them. The pExportName parameter described below includes syntax for identifying individual shaders within a hit group.
This API can be called on either collection state objects or raytracing pipeline state objects.
| Parameter | Definition |
|---|---|
LPCWSTR pExportName |
Shader entrypoint in the state object for which to retrieve stack size. For hit groups, an individual shader within the hit group must be specified as follows: “hitGroupName::shaderType”, where hitGroupName is the entrypoint name for the hit group and shaderType is one of: intersection, closesthit or anyhit (all case sensitive). E.g. “myTreeLeafHitGroup::anyhit” |
Return value: UINT64 |
<p>Amount of stack in bytes required to invoke the shader. If the shader isn’t fully resolved in the state object, or the shader is unknown or of a type for which a stack size isn’t relevant (such as a hit group) the return value is 0xffffffff. The reason for returning 32-bit 0xffffffff for a UINT64 return value is to ensure that bad return values don’t get lost when summed up with other values as part of calculating an overall Pipeline stack size.</p><p>This is only UINT64 at the API. In the DDI this is a UINT; drivers cannot return massive values to the runtime.</p> |
GetPipelineStackSize
UINT64 GetPipelineStackSize();
Retrieve the current pipeline stack size. See Pipeline stack for the meaning of the size.
This call and SetPipelineStackSize() are not re-entrant. This means if calling either or both from separate threads, the app must synchronize on its own.
| Parameter | Definition |
|---|---|
Return value: UINT64 |
Current pipeline stack size in bytes. If called on non-executable state objects (e.g. collections), the return value is 0. |
SetPipelineStackSize
void SetPipelineStackSize(UINT64 PipelineStackSizeInBytes);
Set the current pipeline stack size. See Pipeline stack for the meaning of the size, defaults, and how to pick a size. This method may optionally be called for a raytracing pipeline state.
This call is and GetPipelineStackSize() or any use of raytracing pipeline state objects, such as via DispatchRays() are not re-entrant. This means if the calling any of these from separate threads, the app must synchronize on its own. At time of recording on command list, any given DispatchRays() call or ExecuteIndirect() call uses the most resent stack size setting. Similarly GetPipelineStackSize() call always returns the most recent stack size setting.
The runtime drops calls to state objects other than raytracing pipelines (such as collections).
| Parameter | Definition |
|---|---|
UINT64 PipelineStackSizeInBytes |
<p>Stack size in bytes to use during pipeline execution for each shader thread (of which there can be many thousands in flight on the GPU).</p><p>If the value is >= 0xffffffff (max 32-bit UINT) the runtime drops the call (debug layer will print an error) as this is likely the result of summing up invalid stack sizes returned from GetShaderStackSize() called with invalid parameters (which return 0xffffffff). In this case the previously set stack size (or default) remains.</p><p>This is only UINT64 at the API. In the DDI this is a UINT; as described above, massive stack sizes will not be requested from drivers.</p> |
Additional resource states
D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE = 0x400000
See discussion of this state in Acceleration structure update constraints.
Additional root signature flags
D3D12_ROOT_SIGNATURE_FLAG_LOCAL_ROOT_SIGNATURE
typedef enum D3D12_ROOT_SIGNATURE_FLAGS
{
D3D12_ROOT_SIGNATURE_FLAG_NONE = 0x0,
D3D12_ROOT_SIGNATURE_FLAG_ALLOW_INPUT_ASSEMBLER_INPUT_LAYOUT = 0x1,
D3D12_ROOT_SIGNATURE_FLAG_DENY_VERTEX_SHADER_ROOT_ACCESS = 0x2,
D3D12_ROOT_SIGNATURE_FLAG_DENY_HULL_SHADER_ROOT_ACCESS = 0x4,
D3D12_ROOT_SIGNATURE_FLAG_DENY_DOMAIN_SHADER_ROOT_ACCESS = 0x8,
D3D12_ROOT_SIGNATURE_FLAG_DENY_GEOMETRY_SHADER_ROOT_ACCESS = 0x10,
D3D12_ROOT_SIGNATURE_FLAG_DENY_PIXEL_SHADER_ROOT_ACCESS = 0x20,
D3D12_ROOT_SIGNATURE_FLAG_ALLOW_STREAM_OUTPUT = 0x40,
D3D12_ROOT_SIGNATURE_FLAG_LOCAL_ROOT_SIGNATURE = 0x80,
} D3D12_ROOT_SIGNATURE_FLAGS;
D3D12_ROOT_SIGNATURE_FLAG_LOCAL_ROOT_SIGNATURE indicates the root
signature is to be used with raytracing shaders to define resource
bindings sourced from shader records in shader tables.
This flag cannot be combined with other root signature flags (list shown
above) that are all related to the graphics pipeline – they don’t make
sense together. The absence of the flag means the root signature can be
used with graphics or compute, where the compute version is also shared
with raytracing’s (global) root signature.
Local root signatures don’t have restrictions on the number of root parameters that root signatures do.
This distinction between the two classes of root signatures is useful for drivers since their implementation of each layout could be different – one sourcing root arguments from CommandLists while the other sources them from shader tables.
Note on shader visibility
Root signatures used with raytracing share command list state with
compute, as described in Local root signatures vs root signatures. As such,
the only root parameter shader visibility that applies is
D3D12_SHADER_VISIBILITY_ALL, meaning the root arguments set as part
of compute command list state are also visible to raytracing.
Local root signatures can also only use D3D12_SHADER_VISIBILITY_ALL.
In other words, for both root signatures and local root signatures, there’s nothing interesting to narrow down with shader visibility flags – local root arguments are simply always visible to all raytracing shaders (and compute for root signatures).
Additional SRV type
Acceleration structures are declared in HLSL via the RaytracingAccelerationStructure resource type, which can then be passed into TraceRay() and RayQuery::TraceRayInline(). From the API, these are bound either:
-
via a descriptor heap based SRV with dimension
D3D12_SRV_DIMENSION_RAYTRACING_ACCELERATION_STRUCTURE(whose description is simply a GPUVA, see below) -
as a root descriptor SRV, in which case no special indication is needed to distinguish it from other root descriptor SRVs, since all are described as simply a GPUVA
When creating descriptor heap based acceleration structure SRVs, the
resource parameter must be NULL, as the memory location comes as a GPUVA
from the view description
(D3D12_RAYTRACING_ACCELERATION_STRUCTURE_SRV) shown below. E.g.
CreateShaderResourceView(NULL,pViewDesc).
typedef struct D3D12_RAYTRACING_ACCELERATION_STRUCTURE_SRV
{
D3D12_GPU_VIRTUAL_ADDRESS Location;
} D3D12_RAYTRACING_ACCELERATION_STRUCTURE_SRV;
typedef enum D3D12_SRV_DIMENSION {
D3D12_SRV_DIMENSION_UNKNOWN = 0,
D3D12_SRV_DIMENSION_BUFFER = 1,
D3D12_SRV_DIMENSION_TEXTURE1D = 2,
D3D12_SRV_DIMENSION_TEXTURE1DARRAY = 3,
D3D12_SRV_DIMENSION_TEXTURE2D = 4,
D3D12_SRV_DIMENSION_TEXTURE2DARRAY = 5,
D3D12_SRV_DIMENSION_TEXTURE2DMS = 6,
D3D12_SRV_DIMENSION_TEXTURE2DMSARRAY = 7,
D3D12_SRV_DIMENSION_TEXTURE3D = 8,
D3D12_SRV_DIMENSION_TEXTURECUBE = 9,
D3D12_SRV_DIMENSION_TEXTURECUBEARRAY = 10,
D3D12_SRV_DIMENSION_RAYTRACING_ACCELERATION_STRUCTURE = 11,
} D3D12_SRV_DIMENSION;
typedef struct D3D12_SHADER_RESOURCE_VIEW_DESC
{
DXGI_FORMAT Format;
D3D12_SRV_DIMENSION ViewDimension;
UINT Shader4ComponentMapping;
union
{
D3D12_BUFFER_SRV Buffer;
D3D12_TEX1D_SRV Texture1D;
D3D12_TEX1D_ARRAY_SRV Texture1DArray;
D3D12_TEX2D_SRV Texture2D;
D3D12_TEX2D_ARRAY_SRV Texture2DArray;
D3D12_TEX2DMS_SRV Texture2DMS;
D3D12_TEX2DMS_ARRAY_SRV Texture2DMSArray;
D3D12_TEX3D_SRV Texture3D;
D3D12_TEXCUBE_SRV TextureCube;
D3D12_TEXCUBE_ARRAY_SRV TextureCubeArray;
D3D12_RAYTRACING_ACCELERATION_STRUCTURE_SRV RaytracingAccelerationStructure;
};
} D3D12_SHADER_RESOURCE_VIEW_DESC;
Constants
#define D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BYTE_ALIGNMENT 256
#define D3D12_RAYTRACING_INSTANCE_DESC_BYTE_ALIGNMENT 16
#define D3D12_RAYTRACING_TRANSFORM3X4_BYTE_ALIGNMENT 16
#define D3D12_RAYTRACING_MAX_ATTRIBUTE_SIZE_IN_BYTES 32
#define D3D12_RAYTRACING_SHADER_RECORD_BYTE_ALIGNMENT 32
#define D3D12_RAYTRACING_SHADER_TABLE_BYTE_ALIGNMENT 64
#define D3D12_RAYTRACING_AABB_BYTE_ALIGNMENT 8
#define D3D12_RAYTRACING_MAX_DECLARABLE_TRACE_RECURSION_DEPTH 31
#define D3D12_SHADER_IDENTIFIER_SIZE_IN_BYTES 32
The following constants are relevant when Opacity Micromaps are supported:
#define D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT 128
#define D3D12_RAYTRACING_OPACITY_MICROMAP_OC1_MAX_SUBDIVISION_LEVEL 12
HLSL
Types, enums, subobjects and concepts
Ray flags
Ray flags are passed to TraceRay() or RayQuery::TraceRayInline() to override transparency, culling, and early-out behavior. For an example, see here.
Ray flags are also a template parameter to RayQuery objects to enable static specialization - runtime behavior of RayQuery::TraceRayInline() takes on the OR of dynamic and static/template ray flags.
Shaders that interact with rays can query the current flags via RayFlags() or RayQuery::RayFlags() intrinsics.
enum RAY_FLAG : uint
{
RAY_FLAG_NONE = 0x00,
RAY_FLAG_FORCE_OPAQUE = 0x01,
RAY_FLAG_FORCE_NON_OPAQUE = 0x02,
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH = 0x04,
RAY_FLAG_SKIP_CLOSEST_HIT_SHADER = 0x08,
RAY_FLAG_CULL_BACK_FACING_TRIANGLES = 0x10,
RAY_FLAG_CULL_FRONT_FACING_TRIANGLES = 0x20,
RAY_FLAG_CULL_OPAQUE = 0x40,
RAY_FLAG_CULL_NON_OPAQUE = 0x80,
RAY_FLAG_SKIP_TRIANGLES = 0x100,
RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES = 0x200,
RAY_FLAG_FORCE_OMM_2_STATE = 0x400,
};
(d3d12.h has equivalent D3D12_RAY_FLAG_* defined for convenience)
| Value | Definition |
|---|---|
RAY_FLAG_NONE |
No options selected. |
RAY_FLAG_FORCE_OPAQUE |
<p>All ray-primitive intersections encountered in a raytrace are treated as opaque. So no any hit shaders will be executed regardless of whether or not the hit geometry specifies D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE, and regardless of the instance flags on the instance that was hit.</p><p>In the case of RayQuery::TraceRayInline(), the impact of opacity isn’t on shader invocations but instead on TraceRayInline control flow.</p> <p>Mutually exclusive to RAY_FLAG_FORCE_NON_OPAQUE, RAY_FLAG_CULL_OPAQUE and RAY_FLAG_CULL_NON_OPAQUE.</p> |
RAY_FLAG_FORCE_NON_OPAQUE |
<p>All ray-primitive intersections encountered in a raytrace are treated as non-opaque. So any hit shaders, if present, will be executed regardless of whether or not the hit geometry specifies D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE, and regardless of the instance flags on the instance that was hit.</p><p>In the case of RayQuery::TraceRayInline(), the impact of opacity isn’t on shader invocations but instead on TraceRayInline control flow.</p> <p>Mutually exclusive to RAY_FLAG_FORCE_OPAQUE, RAY_FLAG_CULL_OPAQUE and RAY_FLAG_CULL_NON_OPAQUE.</p> |
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH |
<p>The first ray-primitive intersection encountered in a raytrace automatically causes AcceptHitAndEndSearch() to be called immediately after the any hit shader (including if there is no any hit shader).</p><p>The only exception is when the preceding any hit shader calls IgnoreHit(), in which case the ray continues unaffected (such that the next hit becomes another candidate to be the first hit. For this exception to apply, the any hit shader has to actually be executed. So if the any hit shader is skipped because the hit is treated as opaque (e.g. due to RAY_FLAG_FORCE_OPAQUE or D3D12_RAYTRACING_GEOMETRY_FLAG_OPAQUE or D3D12_RAYTRACING_INSTANCE_FLAG_OPAQUE being set), then AcceptHitAndEndSearch() is called.</p><p>If a closest hit shader is present at the first hit, it gets invoked (unless RAY_FLAG_SKIP_CLOSEST_HIT_SHADER is also present). The one hit that was found is considered “closest”, even though other potential hits that might be closer on the ray may not have been visited.</p><p>A typical use for this flag is for shadows, where only a single hit needs to be found.</p><p>In the case of RayQuery::TraceRayInline(), the impact of this flag is similar to the above, except applied to TraceRayInline control flow, where after the first committed hit, either from fixed function intersection or from the shader, traversal completes.</p> |
RAY_FLAG_SKIP_CLOSEST_HIT_SHADER |
<p>Even if at least one hit has been committed, and the hit group for the closest hit contains a closest hit shader, skip execution of that shader.</p><p>One example where this flag could help is illustrated here.</p><p>This flag is not allowed (makes no sense for) RayQuery::TraceRayInline() or RayQuery’s template parameter.</p> |
RAY_FLAG_CULL_BACK_FACING_TRIANGLES |
<p>Enables culling of back facing triangles. See D3D12_RAYTRACING_INSTANCE_FLAGS for selecting which triangles are back facing, per-instance.</p><p>On instances that specify D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE, this flag has no effect.</p><p>On geometry types other than D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES, this flag has no effect.</p><p>This flag is mutually exclusive to RAY_FLAG_CULL_FRONT_FACING_TRIANGLES.</p> |
RAY_FLAG_CULL_FRONT_FACING_TRIANGLES |
<p>Enables culling of front facing triangles. See D3D12_RAYTRACING_INSTANCE_FLAGS for selecting which triangles are back facing, per-instance.</p><p>On instances that specify D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE, this flag has no effect.</p><p> On geometry types other than D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES, this flag has no effect.</p><p>This flag is mutually exclusive to RAY_FLAG_CULL_BACK_FACING_TRIANGLES.</p> |
RAY_FLAG_CULL_OPAQUE |
<p>Culls all primitives that are considered opaque based on their geometry and instance flags.</p><p>This flag is mutually exclusive to RAY_FLAG_FORCE_OPAQUE, RAY_FLAG_FORCE_NON_OPAQUE, and RAY_FLAG_CULL_NON_OPAQUE. |
RAY_FLAG_CULL_NON_OPAQUE |
<p>Culls all primitives that are considered non-opaque based on their geometry and instance flags.</p><p>This flag is mutually exclusive to RAY_FLAG_FORCE_OPAQUE, RAY_FLAG_FORCE_NON_OPAQUE, and RAY_FLAG_CULL_OPAQUE.</p> |
RAY_FLAG_SKIP_TRIANGLES |
<p>Culls all triangles.</p><p>This flag is mutually exclusive to RAY_FLAG_CULL_FRONT_FACING_TRIANGLES, RAY_FLAG_CULL_BACK_FACING_TRIANGLES and RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES.</p><p>If instances specify D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_CULL_DISABLE it has no effect, as that flag is meant for disabling front or back culling only. In other words RAY_FLAG_SKIP_TRIANGLES cannot be overruled.</p><p>This flag is only supported as of Tier 1.1 implementations.</p> |
RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES |
<p>Culls all procedural primitives.</p><p>This flag is mutually exclusive to RAY_FLAG_SKIP_TRIANGLES.</p><p>This flag is only supported as of Tier 1.1 implementations.</p> |
RAY_FLAG_FORCE_OMM_2_STATE |
<p>Treat unknown opaque and unknown transparent as opaque and transparent, respectively during traversal. If an instance is flagged with D3D12_RAYTRACING_INSTANCE_FLAG_DISABLE_OMMS that takes precedence over this flag.</p><p>This flag is only valid when Opacity Micromaps are supported. This flag is also documented in a separate HLSL Opacity Micromaps spec.</p> |
Ray description structure
The RayDesc structure is passed to TraceRay() or RayQuery::TraceRayInline() to define the origin, direction, and extents of the ray.
struct RayDesc
{
float3 Origin;
float TMin;
float3 Direction;
float TMax;
};
Raytracing pipeline flags
Flags used in Raytracing pipeline config1 subobject.
enum RAYTRACING_PIPELINE_FLAG : uint
{
RAYTRACING_PIPELINE_FLAG_NONE = 0x0,
RAYTRACING_PIPELINE_FLAG_SKIP_TRIANGLES = 0x100,
RAYTRACING_PIPELINE_FLAG_SKIP_PROCEDURAL_PRIMITIVES = 0x200,
RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS = 0x400,
RAYTRACING_PIPELINE_FLAG_ALLOW_CLUSTERED_GEOMETRY = 0x800,
};
For definitions of the flags, see the D3D12 API equivalent, D3D12_RAYTRACING_PIPELINE_FLAGS.
RaytracingAccelerationStructure
RaytracingAccelerationStructure is a resource type that can be declared in HLSL. It is bound as a raw buffer SRV in a descriptor table or root descriptor SRV. The declaration in HLSL is as follows:
RaytracingAccelerationStructure MyScene[] : register(t3,space1);
This example shows an unbounded size array of acceleration structures, which implies coming from a descriptor heap since root descriptors can’t be indexed.
The RaytracingAccelerationStructure (for instance MyScene[i]) is passed to TraceRay() or RayQuery::TraceRayInline() to indicate the top-level acceleration resource built using BuildRaytracingAccelerationStructure(). It is an opaque resource with no methods available to shaders.
Subobject definitions
In addition to creating subobjects at runtime with the API, they can also be defined in HLSL and made available through compiled DXIL libraries.
Hit group
A TriangleHitGroup is a hit group with zero or one anyhit shaders and
zero or one closesthit shaders listed in this order by name (string).
Use an empty string to omit a shader type.
Example:
TriangleHitGroup my_group_name =
{
"anyhit_main",
"" // no closesthit
};
A ProceduralPrimitiveHitGroup is a hit group with zero or one
anyhit, zero or one closesthit and one intersection shader,
listed in this order by name (string).
Use an empty string to omit a shader type.
Example:
ProceduralPrimitiveHitGroup my_procedural_group_name =
{
"anyhit_main",
"closesthit_main"
"intersection_main",
};
Root signature
A named root signature that can used globally in a raytracing pipeline or associated with shaders by name. The root signature is global for all shaders in a DispatchRays call.
GlobalRootSignature my_rs_name =
{
"root signature definition"
};
Local root signature
A named local root signature that can be associated with shaders. A local root signature defines the structure of additional root arguments read from the shader record in the shader table.
LocalRootSignature my_local_rs_name =
{
"local root signature definition"
};
Subobject to entrypoint association
An association between one subobject, such as a local root signature and a list of shader entry points. The subobject is referenced by name in a string, and the list of entry points is supplied as a semicolon-separated list of function names in a string.
SubobjectToEntrypointAssociation my_association_name =
{
"subobject_name",
"function1;function2;function3"
};
Raytracing shader config
Defines the maximum sizes in bytes for the ray payload and intersection attributes. See the API equivalent: D3D12_RAYTRACING_SHADER_CONFIG.
RaytracingShaderConfig shader_config_name =
{
maxPayloadSizeInBytes,
maxAttributeSizeInBytes
};
Raytracing pipeline config
Defines the maximum TraceRay() recursion depth. See the API equivalent: D3D12_RAYTRACING_PIPELINE_CONFIG.
RaytracingPipelineConfig config_name =
{
maxTraceRecursionDepth
};
Raytracing pipeline config1
Defines the maximum TraceRay() recursion depth as well as raytracing pipeline flags. See the API equivalent: D3D12_RAYTRACING_PIPELINE_CONFIG1.
RaytracingPipelineConfig1 config_name =
{
maxTraceRecursionDepth,
RAYTRACING_PIPELINE_CONFIG_FLAG_*
};
The available flags (RAYTRACING_PIPELINE_CONFIG_FLAG_*) are defined at: Raytracing pipeline flags.
This subobject is only available on devices with Tier 1.1 raytracing support.
Intersection attributes structure
Intersection attributes come from one of two sources:
(1) Triangle geometry via fixed-function triangle intersection. In this case the structure used is the following:
struct BuiltInTriangleIntersectionAttributes
{
float2 barycentrics;
};
any hit and closest hit shaders invoked using fixed-function triangle intersection must use this structure for hit attributes.
Given attributes a0, a1 and a2 for the 3 vertices of a triangle,
barycentrics.x is the weight for a1 and barycentrics.y is the weight
for a2. For example, the app can interpolate by doing: a = a0 +
barycentrics.x * (a1-a0) + barycentrics.y * (a2-a0).
(2) Intersection with axis-aligned bounding boxes for procedural primitives in the raytracing acceleration structure triggers an intersection shader. That shader provides a user-defined intersection attribute structure to the ReportHit() call. The any hit and closest hit shaders bound in the same hit group with this intersection shader must use the same structure for hit attributes, even if the attributes are not referenced. The maximum attribute structure size is 32 bytes (D3D12_RAYTRACING_MAX_ATTRIBUTE_SIZE_IN_BYTES).
Ray payload structure
This is a user-defined structure that is provided as an inout argument in the TraceRay() call, and as an inout parameter in the shader types that may access the ray payload (any hit, closest hit, and miss shaders). Any shaders that access the ray payload must use the same structure as the one provided at the originating TraceRay() call. Even if one of these shaders doesn’t reference the ray payload at all, it still must specify the matching payload as the originating TraceRay() call.
See payload access qualifiers for a discussion of annotations on payload members introduced in Shader Models 6.6 and 6.7.
Call parameter structure
This is a user-defined structure provided as an inout argument in the CallShader() call, and as an inout parameter for the Callable shader. The structure type used in the callable shader must match the structure provided to the corresponding CallShader() call.
Shaders
These shaders are functions compiled into a library (target lib_6_3), and identified by an attribute [shader(“shadertype”)] on the shader function.
See Intrinsics and System value intrinsics to see what is allowed for each shader type.
Certain features supported in graphics or compute shader types are not supported in raytracing shader types. See Shader limitations resulting from independence.
Ray generation shader
shader type: raygeneration
Overview is here.
Ray generation shaders call TraceRay() to generate rays (aside: RayQuery::TraceRayInline() works too, as it can be called from anywhere). The initial user-defined ray payload for each ray is provided to the TraceRay() call site. CallShader() may also be used in ray generation shaders to invoke callable shaders.
Rough Example:
struct SceneConstantStructure { ... };
ConstantBuffer<SceneConstantStructure> SceneConstants;
RaytracingAccelerationStructure MyAccelerationStructure : register(t3);
struct MyPayload { ... };
[shader("raygeneration")]
void raygen_main()
{
RayDesc myRay = {
SceneConstants.CameraOrigin,
SceneConstants.TMin,
computeRayDirection(SceneConstants.LensParams, DispatchRaysIndex(),
DispatchRaysDimensions()),
SceneConstants.TMax
};
MyPayload payload = { ... }; // init payload
TraceRay(
MyAccelerationStructure,
SceneConstants.RayFlags,
SceneConstants.InstanceInclusionMask,
SceneConstants.RayContributionToHitGroupIndex,
SceneConstants.MultiplierForGeometryContributionToHitGroupIndex,
SceneConstants.MissShaderIndex,
myRay,
payload);
WriteFinalPixel(DispatchRaysIndex(), payload);
}
Intersection shader
shader type: intersection
Overview is here.
Used to implement custom intersection primitives, the intersection
shader is invoked for rays intersecting an associated bounding volume
(bounding box). The intersection shader does not have access to the ray
payload, but defines the intersection attributes for each hit through
the ReportHit() call. The handling of
ReportHit() may stop the intersection shader early, if the
Ray Flag RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH
is set, or AcceptHitAndEndSearch() is called
from an any hit shader. Otherwise, it returns true if
the hit was accepted or false if rejected (see ReportHit()
for details). This means that an any hit shader, if
present, must execute before control conditionally returns to the
intersection shader.
Rough Example:
struct CustomPrimitiveDef { ... };
struct MyAttributes { ... };
struct CustomIntersectionIterator {...};
void InitCustomIntersectionIterator(CustomIntersectionIterator it) {...}
bool IntersectCustomPrimitiveFrontToBack(
CustomPrimitiveDef prim,
inout CustomIntersectionIterator it,
float3 origin, float3 dir,
float rayTMin, inout float curT,
out MyAttributes attr);
[shader("intersection")]
void intersection_main()
{
float THit = RayTCurrent();
MyAttributes attr;
CustomIntersectionIterator it;
InitCustomIntersectionIterator(it);
while(IntersectCustomPrimitiveFrontToBack(
CustomPrimitiveDefinitions[LocalConstants.PrimitiveIndex],
it, ObjectRayOrigin(), ObjectRayDirection(),
RayTMin(), THit, attr))
{
// Exit on the first hit. Note that if the ray has
// RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH or an
// anyhit shader is used and calls AcceptHitAndEndSearch(),
// that would also fully exit this intersection shader (making
// the "break" below moot in that case).
if (ReportHit(THit, /*hitKind*/ 0, attr) &&
(RayFlags() & RAY_FLAG_FORCE_OPAQUE))
break;
}
}
Any hit shader
shader type: anyhit
Overview is here.
The any hit shader is invoked when intersections are not opaque. The any hit shaders must declare a payload parameter, followed by an attributes parameter. Each must be a user defined structure type matching types used for TraceRay and ReportHit respectively (or the BuiltInIntersectionAttributes structure when fixed function triangle intersection is used).
The any hit shader may do the following kinds of things:
-
Read and modify the ray payload: (inout payload_t rayPayload)
-
Read the intersection attributes: (in attr_t attributes)
-
Call AcceptHitAndEndSearch(), which accepts the current hit, ends the any hit shader, ends the intersection shader (if any), and executes the closest hit shader on the closest hit so far (if active).
-
Call IgnoreHit(), which ends the any hit shader and tells the system to continue searching for hits, including returning control to an intersection shader (if currently executing) returning false from the ReportHit() call site.
-
Return without calling either of these intrinsics, which accepts the current hit and tells the system to continue searching for hits, including returns control to the intersection shader (if any), returning true at the ReportHit() call site to indicate that the hit was accepted.
Even if an any hit shader invocation is ended by IgnoreHit() or AcceptHitAndEndSearch(), any modifications made to the ray payload so far must still be retained.
Rough Example:
[shader("anyhit")]
void anyhit_main( inout MyPayload payload, in MyAttributes attr )
{
float3 hitLocation = ObjectRayOrigin() + ObjectRayDirection() *
RayTCurrent();
float alpha = computeAlpha(hitLocation, attr, ...);
// Processing shadow and only care if a hit is registered?
if (TerminateShadowRay(alpha))
AcceptHitAndEndSearch(); // aborts function
// Save alpha contribution and ignoring hit?
if (SaveAndIgnore(payload, RayTCurrent(), alpha, attr, ...))
IgnoreHit(); // aborts function
// do something else
// return to accept and update closest hit
}
Closest hit shader
shader type: closesthit
Overview is here.
When the closest hit has been determined or ray intersection search ended, the closest hit shader is invoked (if enabled). This is where surface shading and additional ray generation will typically occur. Closest hit shaders must declare a payload parameter, followed by an attributes parameter. Each must be a user defined structure type matching types used for TraceRay and ReportHit respectively (or the BuiltInIntersectionAttributes structure when fixed function triangle intersection is used).
Closest hit shaders may:
-
Read and modify the ray payload: (inout payload_t rayPayload)
-
Read the closest Intersection Attributes: (in attr_t attributes)
-
Use CallShader() and TraceRay() to schedule more work and read back results.
Rough Example:
[shader("closesthit")]
void closesthit_main(inout MyPayload payload, in MyAttributes attr)
{
CallShader( ... ); // maybe
// update payload for surface
// trace reflection
float3 worldRayOrigin = WorldRayOrigin() + WorldRayDirection() *
RayTCurrent();
float3 worldNormal = mul(attr.normal, (float3x3)ObjectToWorld3x4());
RayDesc reflectedRay = { worldRayOrigin, SceneConstants.Epsilon,
ReflectRay(WorldRayDirection(), worldNormal),
SceneConstants.TMax };
TraceRay(MyAccelerationStructure,
SceneConstants.RayFlags,
SceneConstants.InstanceInclusionMask,
SceneConstants.RayContributionToHitGroupIndex,
SceneConstants.MultiplierForGeometryContributionToHitGroupIndex,
SceneConstants.MissShaderIndex,
reflectedRay,
payload);
// Combine final contributions into ray payload
// this ray query is now complete.
// Alternately, could look at data in payload result based on that make
// other TraceRay calls. No constraints on the code structure.
}
Alternatively to the above example of calculating a current ray hit position via “rayOrigin + rayDirection * RayTCurrent()”, it is possible to calculate the hit position via surface parametrization using barycentrics and vertex positions. The former is faster to calculate, but more prone to floating point error as any error will offset the position along the ray direction often away from the surface. This is, in particular, true for large RayTCurrent() values. The other method, surface parametrization, is more precise with any computational error shifting the computed position mostly along the surface, but also more expensive as it requires loading the vertex positions and doing more calculations. The extra overhead may be worthwhile if precision is critical.
Miss shader
shader type: miss
Overview is here. The miss shader must include a user defined structure typed payload parameter matching the one supplied to TraceRay().
If no intersections are found or accepted, the miss shader is invoked. This is useful for background or sky shading. The miss shader may use CallShader() and TraceRay() to schedule more work.
Rough Example:
[shader("miss")]
void miss_main(inout MyPayload payload)
{
// Use ray system values to compute contributions of background,
// sky,etc...
// Combine contributions into ray payload
CallShader( ... ); // maybe
TraceRay( ... ); // maybe
// this ray query is now complete
}
Callable shader
shader type: callable
Overview is here.
The callable shader is invoked from another shader by using the CallShader() intrinsic. There is a parameter structure supplied at the CallShader() call site that must match the parameter structure used in the callable shader pointed to by the requested index into the callable shader table supplied through the DispatchRays() API. The callable shader must declare this parameter as inout. Additionally, the callable shader may read launch index and dimension inputs, see System value intrinsics.
Rough Example:
[shader("callable")]
void callable_main(inout MyParams params)
{
// Perform some common operations and update params
CallShader( ... ); // maybe
}
Intrinsics
| intrinsics \ shaders | ray generation | intersection | any hit | closest hit | miss | callable | all shaders including graphics/compute |
|---|---|---|---|---|---|---|---|
| CallShader() | * | * | * | * | |||
| TraceRay() | * | * | * | ||||
| ReportHit() | * | ||||||
| IgnoreHit() | * | ||||||
| AcceptHitAndEndSearch() | * |
CallShader
This intrinsic function definition is equivalent to the following function template:
template<param_t>
void CallShader(uint ShaderIndex, inout param_t Parameter);
| Parameter | Definition |
|---|---|
uint ShaderIndex |
Provides index into the callable shader table supplied through the DispatchRays() API. See Callable shader table indexing. |
inout param_t Parameter |
The user-defined parameters to pass to the callable shader. This parameter structure must match the parameter structure used in the callable shader pointed to in the shader table. |
TraceRay
Send a ray into a search for hits in an acceleration structure, including various types of shader invocations where applicable. See TraceRay() control flow.
This intrinsic function definition is equivalent to the following function template:
Template<payload_t>
void TraceRay(RaytracingAccelerationStructure AccelerationStructure,
uint RayFlags,
uint InstanceInclusionMask,
uint RayContributionToHitGroupIndex,
uint MultiplierForGeometryContributionToHitGroupIndex,
uint MissShaderIndex,
RayDesc Ray,
inout payload_t Payload);
| Parameter | Definition |
|---|---|
RaytracingAccelerationStructure AccelerationStructure |
Top-level acceleration structure to use. Specifying a NULL acceleration structure forces a miss. |
uint RayFlags |
Valid combination of Ray flags. Only defined ray flags are propagated by the system, e.g. visible to the RayFlags() shader intrinsic. Presence of unknown flags results in undefined behavior. |
uint InstanceInclusionMask |
<p>Bottom 8 bits of InstanceInclusionMask are used to include/reject geometry instances based on the InstanceMask in each instance:</p><p>if(!((InstanceInclusionMask & InstanceMask) & 0xff)) { ignore intersection }</p> |
uint RayContributionToHitGroupIndex |
Offset to add into Addressing calculations within shader tables for hit group indexing. Only the bottom 4 bits of this value are used. |
uint MultiplierForGeometryContributionToShaderIndex |
Stride to multiply by GeometryContributionToHitGroupIndex (which is just the 0 based index the geometry was supplied by the app into its bottom-level acceleration structure). See Addressing calculations within shader tables for hit group indexing. Only the bottom 4 bits of this multiplier value are used. |
uint MissShaderIndex |
Miss shader index in Addressing calculations within shader tables. Only the bottom 16 bits of this value are used. |
RayDesc Ray |
Ray to be traced. See Ray-extents for bounds on valid ray parameters. |
inout payload_t Payload |
User defined ray payload accessed both for both input and output by shaders invoked during raytracing. After TraceRay completes, the caller can access the payload as well. |
ReportHit
This intrinsic definition is equivalent to the following function template:
template<attr_t>
bool ReportHit(float THit, uint HitKind, attr_t Attributes);
| Parameter | Definition |
|---|---|
float THit |
The parametric distance of the intersection. |
uint HitKind |
A value used to identify the type of hit. This is a user-specified value in the range of 0-127. The value can be read by any hit or closest hit shaders with the HitKind() intrinsic. |
attr_t Attributes |
Intersection attributes. The type attr_t is the user-defined intersection attribute structure. See Intersection attributes structure. |
ReportHit returns true if the hit was accepted. A hit is rejected if THit is outside the current ray interval, or the any hit shader calls IgnoreHit(). The current ray interval is defined by RayTMin() and RayTCurrent().
IgnoreHit
void IgnoreHit();
Used in an any hit shader to reject the hit and end the shader. The hit search continues on without committing the distance (hitT) and attributes for the current hit. The ReportHit() call in the intersection shader (if any) will return false. Any modifications made to the ray payload up to this point in the any hit shader are preserved.
AcceptHitAndEndSearch
void AcceptHitAndEndSearch();
Used in an any hit shader to commit the current hit (hitT and attributes) and then stop searching for more hits for the ray. If there is an intersection shader running, that stops. Execution passes to the closest hit shader (if enabled) with the closest hit recorded so far.
System value intrinsics
System values are retrieved by using special intrinsic functions, rather than including parameters with special semantics in your shader function signature.
The following table shows where system value intrinsics.
| values \ shaders | ray generation | intersection | any hit | closest hit | miss | callable |
|---|---|---|---|---|---|---|
| Ray dispatch system values: | ||||||
| uint3 DispatchRaysIndex() | * | * | * | * | * | * |
| uint3 DispatchRaysDimensions() | * | * | * | * | * | * |
| Ray system values: | ||||||
| float3 WorldRayOrigin() | * | * | * | * | ||
| float3 WorldRayDirection() | * | * | * | * | ||
| float RayTMin() | * | * | * | * | ||
| float RayTCurrent() | * | * | * | * | ||
| uint RayFlags() | * | * | * | * | ||
| Primitive/object space system values: | ||||||
| uint InstanceIndex() | * | * | * | |||
| uint InstanceID() | * | * | * | |||
| uint GeometryIndex() (requires Tier 1.1 implementation) |
* | * | * | |||
| uint PrimitiveIndex() | * | * | * | |||
| float3 ObjectRayOrigin() | * | * | * | |||
| float3 ObjectRayDirection() | * | * | * | |||
| float3x4 ObjectToWorld3x4() | * | * | * | |||
| float4x3 ObjectToWorld4x3() | * | * | * | |||
| float3x4 WorldToObject3x4() | * | * | * | |||
| float4x3 WorldToObject4x3() | * | * | * | |||
| Hit specific system values: | ||||||
| uint HitKind() | * | * |
Ray dispatch system values
Launch system values are inputs available to every raytracing shader type. They return the values at the ray generation shader instance that led to the current shader instance.
DispatchRaysIndex
The current x and y location within the Width and Height made available through the DispatchRaysDimensions() system value intrinsic.
uint3 DispatchRaysIndex();
DispatchRaysDimensions
The Width, Height and Depth values from the D3D12_DISPATCH_RAYS_DESC
structure provided to the originating DispatchRays()
call.
uint3 DispatchRaysDimensions();
Ray system values
These system values are available to all shaders in the hit group and miss shaders.
WorldRayOrigin
The world-space origin for the current ray.
float3 WorldRayOrigin();
WorldRayDirection
The world-space direction for the current ray.
float3 WorldRayDirection();
RayTMin
This is a float representing the parametric starting point for the ray.
float RayTMin();
RayTMin defines the starting point of the ray according to the following formula: Origin + (Direction * RayTMin). Origin and Direction may be in either world or object space, which results in either a world or an object space starting point.
RayTMin is defined when calling TraceRay(), and is constant for the duration of that call.
RayTCurrent
This is a float representing the current parametric ending point for the ray.
float RayTCurrent();
RayTCurrent defines the current ending point of the ray according to the following formula: Origin + (Direction * RayTCurrent). Origin and Direction may be in either world or object space, which results in either a world or an object space ending point.
RayTCurrent is initialized by the TraceRay() call from RayDesc::TMax, and updated during the trace query as intersections are reported (in the any hit), and accepted.
In the intersection shader, it represents the distance to the closest intersection found so far. It will be updated after ReportHit() to the THit value provided if the hit was accepted.
In the any hit shader, it represents the distance to the current intersection being reported.
In the closest hit shader, it represents the distance to the closest intersection accepted.
In the miss shader, it is equal to TMax passed to the TraceRay() call.
RayFlags
This is a uint containing the current ray flags (only). It doesn’t reveal any flags that may have been added externally via D3D12_RAYTRACING_PIPELINE_CONFIG1.
uint RayFlags();
This can be useful if, for instance, in an intersection shader an app wants to look at the current ray’s culling flags and apply corresponding culling in its custom intersection code.
Primitive/object space system values
These system values are available once a primitive has been selected for intersection. They enable identifying what is being intersected by the ray, the object space ray origin and direction, and the transformation matrices between object and world space.
InstanceIndex
The autogenerated index of the current instance in the top-level structure.
uint InstanceIndex();
InstanceID
The user-provided InstanceID on the bottom-level acceleration structure instance within the top-level structure.
uint InstanceID();
GeometryIndex
The autogenerated index of the current geometry in the bottom-level acceleration structure.
This method is only available on Tier 1.1 implementations.
For clustered BLAS, geometry index is specified per-triangle rather than per-geometry grouping. See The role of geometry index in a cluster.
The MultiplierForGeometryContributionToHitGroupIndex parameter to TraceRay() can be set to 0 to stop the geometry index from contributing to shader table indexing if the shader just wants to rely on GeometryIndex() to distinguish geometries.
uint GeometryIndex();
PrimitiveIndex
The autogenerated index of the primitive within the geometry inside the bottom-level acceleration structure instance.
For clustered BLAS, the primitive index is scoped to the individual CLAS (cluster) that was hit, with a range of 0-255. Use ClusterID() to identify which cluster was hit.
uint PrimitiveIndex();
For D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES, this is the triangle
index within the geometry object.
For D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS,
this is the index into the AABB array defining the geometry object.
ObjectRayOrigin
Object-space origin for the current ray. Object-space refers to the space of the current bottom-level acceleration structure.
float3 ObjectRayOrigin();
ObjectRayDirection
Object-space direction for the current ray. Object-space refers to the space of the current bottom-level acceleration structure.
float3 ObjectRayDirection();
ObjectToWorld3x4
Matrix for transforming from object-space to world-space. Object-space refers to the space of the current bottom-level acceleration structure.
float3x4 ObjectToWorld3x4();
The only difference between this and ObjectToWorld4x3() is the matrix is
transposed – use whichever is convenient.
ObjectToWorld4x3
Matrix for transforming from object-space to world-space. Object-space refers to the space of the current bottom-level acceleration structure.
float4x3 ObjectToWorld4x3();
The only difference between this and ObjectToWorld3x4() is the matrix is
transposed – use whichever is convenient.
WorldToObject3x4
Matrix for transforming from world-space to object-space. Object-space refers to the space of the current bottom-level acceleration structure.
float3x4 WorldToObject3x4();
The only difference between this and WorldToObject4x3() is the matrix is transposed – use whichever is convenient.
WorldToObject4x3
Matrix for transforming from world-space to object-space. Object-space refers to the space of the current bottom-level acceleration structure.
float4x3 WorldToObject4x3();
The only difference between this and WorldToObject3x4() is the matrix is transposed – use whichever is convenient.
Hit specific system values
HitKind
Returns the value passed as HitKind in
ReportHit(). If intersection was reported by
fixed-function triangle intersection, HitKind will be one of
HIT_KIND_TRIANGLE_FRONT_FACE (254) or
HIT_KIND_TRIANGLE_BACK_FACE (255).
(d3d12.h has equivalent D3D12_HIT_KIND_* defined for convenience)
uint HitKind();
TriangleObjectPositions
Not shipped yet, part of Shader Model 6.10.
BuiltInTrianglePositions TriangleObjectPositions()
May only be used if the hit BLAS was built with RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS. Otherwise behavior is undefined.
For clustered geometry, the operation that built the CLAS must have set D3D12_RTAS_OPERATION_FLAG_ALLOW_DATA_ACCESS, and the CLAS must not have been built with D3D12_RTAS_CLUSTER_OPERATION_CLAS_FLAG_DISALLOW_DATA_ACCESS. All CLAS referenced by a given cluster BLAS must have consistently chosen to allow data access or not when they were built, otherwise behavior is undefined.
This intrinsic is a required featurein Shader Model 6.10.
This intrinsic may only be used with a triangle hit, AnyHit or ClosestHit shaders, otherwise behavior is undefined. A shader can check for a triangle hit with HitKind.
The VertexIndex parameter specifies the vertex within the triangle to read in the range of [0..2].
Specifying an index outside this range produces undefined behavior.
BuiltInTrianglePositions
Not shipped yet, part of Shader Model 6.10.
struct BuiltInTrianglePositions {
float3 p0, p1, p2;
};
Built-in structure for returning three object-space triangle positions.
RayQuery
RayQuery<RAY_FLAGS,RAYQUERY_FLAGS>
RayQuery represents the state of an inline raytracing call into an acceleration structure via member function RayQuery::TraceRayInline(). It is “inline” in the sense that this form of raytracing doesn’t automatically invoke other shader invocations during traversal as TraceRay() does. The shader observes RayQuery to be in one of a set of states, each of which exposes relevant methods to retrieve information about the current state or continue the query into the acceleration structure.
RayQuery takes template parameter(s) on instantiation: a set of RAY_FLAGS that are inline/literal at compile time, and with Shader Model 6.9+ support an additional optional RAYQUERY_FLAGS parameter with rayquery-specific flags. These flags enable implementations to produce more efficient inline code generation by drivers customized to the selected flags. For example, declaring RayFlags<RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES> myRayQuery means ray traversals done via myRayQuery will not enumerate procedural primitives. Applications can also custimize their code to rely on the impact of the selected flags - in this example not having to write code to handle the procedural primitives showing up. RayQuery::TraceRayInline() also has a RAY_FLAGS field which allows dynamic ray flags configuration - the template flags are OR’d with the dynamic flags during a raytrace.
Pseudocode examples are here.
The size of RayQuery is implementation specific and opaque. Shaders can have any number of live RayQuery objects during shader execution, but at the cost of an unknown (and relatively high) amount of hardware register storage, which can limit how many shaders can run in parallel. This unknown size is in contrast to traditional shader variables (e.g. float4 foo), whose register cost is obvious by the data type of the variable (e.g. 16 bytes for a float4).
If a variable of type RayQuery is assigned to another (which must have been declared with a matching template specification), a reference to the original is passed (rather than a clone), so they are both now operating on the same shared state machine. If a variable of type RayQuery is passed into a function as a parameter, it is passed by reference. If a variable of type RayQuery is overwritten by another (such as by assignment), the overwritten object disappears.
A RayQuery::Clone() intrinsic was considered to enable forking an in progress ray traversal. But this appeared to be of no value, lacking a known interesting scenario.
A proposed feature that was cut is the ability for full TraceRay() to return a RayQuery object. This would have been a middle ground between inline raytracing and the dynamic-shader-based form - e.g. apps could use dynamic any-hit shaders but then choose to do final hit/miss processing in the calling shader, without the dynamic shaders having to bother stuffing ray query metadata like hit distance in the ray payload - redundant information given that the system knows it. It turned out that for some implementations this would actually be slower than the application manually stuffing only needed values into the ray payload, and would require extra compilation for paths that need the ray query versus those that do not.
This feature could come back in a more refined form in the future. This could be allowing the user to declare entries in the ray payload as system generated values for all query data (e.g. SV_CurrentT). Some implementations could choose to compile shaders (which see the payload declaration) to automatically store these values in the ray payload as declared, whereas other implementations would be free to pull these system values as needed from elsewhere if they are readily available (avoiding payload bloat).
RayQuery flags
RayQuery flags are optionally specified as a second template parameter to RayQuery objects to enable static specialization - runtime behavior of RayQuery::TraceRayInline() takes on the OR of dynamic and static/template ray flags as well as rayquery-specific flags.
enum RAYQUERY_FLAG : uint
{
RAYQUERY_FLAG_NONE = 0x00, // default
RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPS = 0x01,
RAYQUERY_FLAG_ALLOW_CLUSTERED_GEOMETRY = 0x02,
};
(d3d12.h has equivalent D3D12_RAY_FLAG_* defined for convenience)
| Value | Definition |
|---|---|
RAYQUERY_FLAG_NONE |
No options selected. |
RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPS |
If this flag is specified, the rayquery object supports Opacity Micromaps. If a triangle with an OMM is encountered during traversal with this flag cleared, behavior is undefined. This flag should not be set if there are no OMMs present, since it may incur a small penalty on traversal performance overall. This is the rayquery equivalent for TraceRayInline() of what the D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS flag accomplishes for non-inline TraceRay(). This flag is also documented in a separate HLSL Opacity Micromaps spec. |
RAYQUERY_FLAG_ALLOW_CLUSTERED_GEOMETRY |
If this flag is specified, the pipeline supports clustered geometry. Behavior is undefined if an acceleration structure with clustered geometry is accessed from a pipeline that didn’t specify this flag. This is the rayquery equivalent for TraceRayInline() of what the D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_CLUSTERED_GEOMETRY flag accomplishes for non-inline TraceRay(). This flag is also documented in a separate HLSL Clustered Geometry spec. |
RayQuery intrinsics
RayQuery supports the methods (*) in the following tables depending on its current state. The intrinsics are listed across several tables for readability (with entries repeated as appicable). Calling unsupported methods is invalid and produces undefined results.
The first table lists intrinsics available after the two steps in RayQuery initialization: First, declaring a RayQuery object (with RayFlags template parameter), followed by calling RayQuery::TraceRayInline() to initialize trace parameters but not yet begin the traversal. RayQuery::TraceRayInline() can be called over again any time to initialize a new trace, discarding the current one regardlessof what state it is in.
| Intrinsic \ State | New RayQuery object |
TraceRayInline() was called |
|---|---|---|
| TraceRayInline() | * | * |
bool Proceed() |
* | |
| Abort() | * | |
COMMITTED_STATUS CommittedStatus() |
* |
The following table lists intrinsics available when RayQuery::Proceed() returned TRUE, meaning a type of hit candidate that requires shader evaluation has been found. Methods named Committed*() in this table may not actually be available depending on the current CommittedStatus() (i.e what type of hit has been commited yet if any?) - this is further clarified in another table further below.
The following table lists intrinsics available depending on the current current COMMITTED_STATUS (i.e. what type of hit has been commited, if any?). This applies regardless of whether RayQuery::Proceed() has returned TRUE (shader evaluation needed for traversal), or FALSE (traversal complete). If TRUE, additional methods than shown below are available based on the table above.
| Intrinsic \ CommittedStatus() | COMMITTED_TRIANGLE_HIT |
COMMITTED_PROCEDURAL_PRIMITIVE_HIT |
COMMITTED_NOTHING |
|---|---|---|---|
| TraceRayInline() | * | * | * |
COMMITTED_STATUS CommittedStatus() |
* | * | * |
| Ray system values: | |||
| uint RayFlags() | * | * | * |
| float3 WorldRayOrigin() | * | * | * |
| float3 WorldRayDirection() | * | * | * |
| float RayTMin() | * | * | * |
| float CommittedRayT() | * | * | * |
| Primitive/object space system values: | |||
| uint CommittedInstanceIndex() | * | * | |
| uint CommittedInstanceID() | * | * | |
| uint CommittedInstanceContributionToHitGroupIndex() | * | * | |
| uint CommittedGeometryIndex() | * | * | |
| uint CommittedPrimitiveIndex() | * | * | |
| float3 CommittedObjectRayOrigin() | * | * | |
| float3 CommittedObjectRayDirection() | * | * | |
| float3x4 CommittedObjectToWorld3x4() | * | * | |
| float4x3 CommittedObjectToWorld4x3() | * | * | |
| float3x4 CommittedWorldToObject3x4() | * | * | |
| float4x3 CommittedWorldToObject4x3() | * | * | |
| Hit specific system values: | |||
| float2 CommittedTriangleBarycentrics() | * | ||
| bool CommittedTriangleFrontFace() | * | ||
Not shipped yet, SM 6.10: BuiltInTrianglePositions CommittedTriangleObjectPositions() |
* |
RayQuery enums
COMMITTED_STATUS
enum COMMITTED_STATUS : uint
{
COMMITTED_NOTHING,
COMMITTED_TRIANGLE_HIT,
COMMITTED_PROCEDURAL_PRIMITIVE_HIT
};
Return value for RayQuery::CommittedStatus().
| Value | Definition |
|---|---|
COMMITTED_NOTHING |
No hits have been committed yet. |
COMMITTED_TRIANGLE_HIT |
Closest hit so far is a triangle, a result of either the shader previously calling RayQuery::CommitNonOpaqueTriangleHit() or a fixed function opaque triangle intersection. |
COMMITTED_PROCEDURAL_PRIMITIVE_HIT |
Closest hit so far is a procedural primitive, a result of the shader previously calling RayQuery::CommittProceduralPrimitiveHit(). |
CANDIDATE_TYPE
enum CANDIDATE_TYPE : uint
{
CANDIDATE_NON_OPAQUE_TRIANGLE,
CANDIDATE_PROCEDURAL_PRIMITIVE
};
Return value for RayQuery::CandidateType().
| Value | Definition |
|---|---|
CANDIDATE_NON_OPAQUE_TRIANGLE |
Acceleration structure traversal has encountered a non opaque triangle (that would be the closest hit so far if committed) for the shader to evaluate. If the shader decides this is opaque, it needs to call RayQuery::CommitNonOpaqueTriangleHit(). |
CANDIDATE_PROCEDURAL_PRIMITIVE |
Acceleration structure traversal has encountered a procedural primitive for the shader to evaluate. It is up to the shader to calculate all possible intersections for this procedural primitive and commit at most one hit that it sees would be the closest so far, via RayQuery::CommitProceduralPrimitiveHit(). |
RayQuery TraceRayInline
Initialize parameters for an inline raytrace, invoking no other shader invocations, into an acceleration structure. Actual traversal does not begin yet. The calling shader manages the progress of the query via returned RayQuery object.
See Inline raytracing for an overview and the TraceRayInline() control flow diagram for more detail. Pseudocode examples are here.
This intrinsic function definition is equivalent to the following function:
void RayQuery::TraceRayInline(
RaytracingAccelerationStructure AccelerationStructure,
uint RayFlags,
uint InstanceInclusionMask,
RayDesc Ray);
| Parameter | Definition |
|---|---|
RaytracingAccelerationStructure AccelerationStructure |
Top-level acceleration structure to use. Specifying a NULL acceleration structure forces a miss. |
uint RayFlags |
Valid combination of Ray flags. Only defined ray flags are propagated by the system, e.g. visible to the RayFlags() shader intrinsic. These flags are OR’d with the RayQuery’s ray flags, and the combination must be valid (see the definition of each flag). Presence of unknown flags results in undefined behavior. |
uint InstanceInclusionMask |
<p>Bottom 8 bits of InstanceInclusionMask are used to include/reject geometry instances based on the InstanceMask in each instance:</p><p>if(!((InstanceInclusionMask & InstanceMask) & 0xff)) { ignore intersection }</p> |
RayDesc Ray |
Ray to be traced. See Ray-extents for bounds on valid ray parameters. |
Return: RayQuery |
Opaque object defining the state of a ray trace operation with no shader invocations. The caller calls methods on this object to participate in the acceleration structure traversal for as long as desired or until it ends. See RayQuery. |
RayQuery intrinsics illustrates when this is valid to call.
TraceRayInline examples
- Example 1: Trivially get a simple hit/miss from tracing a ray.
- Example 2: More general case, handling all the possible states.
- Example 3: Expensive scenario with simultaneous traces.
TraceRayInline example 1
(back to examples list)
Trivial example, just get a simple triangle hit/miss from tracing a ray.
Here is a diagram that matches this example, illustrating what happens behind the scenes: Specialized TraceRayInline control flow.
RaytracingAccelerationStructure myAccelerationStructure : register(t3);
float4 MyPixelShader(float2 uv : TEXCOORD) : SV_Target0
{
...
// Instantiate ray query object.
// Template parameter allows driver to generate a specialized
// implementation.
RayQuery<RAY_FLAG_CULL_NON_OPAQUE |
RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES |
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH> q;
// Set up a trace. No work is done yet.
q.TraceRayInline(
myAccelerationStructure,
myRayFlags, // OR'd with flags above
myInstanceMask,
myRay);
// Proceed() below is where behind-the-scenes traversal happens,
// including the heaviest of any driver inlined code.
// In this simplest of scenarios, Proceed() only needs
// to be called once rather than a loop:
// Based on the template specialization above,
// traversal completion is guaranteed.
q.Proceed();
// Examine and act on the result of the traversal.
// Was a hit committed?
if(q.CommittedStatus()) == COMMITTED_TRIANGLE_HIT)
{
ShadeMyTriangleHit(
q.CommittedInstanceIndex(),
q.CommittedPrimitiveIndex(),
q.CommittedGeometryIndex(),
q.CommittedRayT(),
q.CommittedTriangleBarycentrics(),
q.CommittedTriangleFrontFace() );
}
else // COMMITTED_NOTHING
// From template specialization,
// COMMITTED_PROCEDURAL_PRIMITIVE can't happen.
{
// Do miss shading
MyMissColorCalculation(
q.WorldRayOrigin(),
q.WorldRayDirection());
}
...
}
TraceRayInline example 2
(back to examples list)
More general case, handling all the possible states.
This a diagram illustrates the full control flow to support this type of scenario: TraceRayInline control flow.
RaytracingAccelerationStructure myAccelerationStructure : register(t3);
struct MyCustomAttrIntersectionAttributes { float4 a; float3 b; }
[numthreads(64,1,1)]
void MyComputeShader(uint3 DTid : SV_DispatchThreadID)
{
...
// Instantiate ray query object.
// Template parameter allows driver to generate a specialized
// implemenation. No specialization in this example.
RayQuery<RAY_FLAG_NONE> q;
// Set up a trace
q.TraceRayInline(
myAccelerationStructure,
myRayFlags,
myInstanceMask,
myRay);
// Storage for procedural primitive hit attributes
MyCustomIntersectionAttributes committedCustomAttribs;
// Proceed() is where behind-the-scenes traversal happens,
// including the heaviest of any driver inlined code.
// Returns TRUE if there's a task for the shader to perform
// as part of traversal
while(q.Proceed())
{
switch(q.CandidateType())
{
case CANDIDATE_PROCEDURAL_PRIMITIVE:
{
float tHit;
MyCustomIntersectionAttributes candidateAttribs;
// For procedural primitives, opacity is handled manually -
// if an intersection is determined to not be opaque, just don't consider it
// as a candidate.
while(MyProceduralIntersectionEnumerator(
tHit,
candidateAttribs,
q.CandidateInstanceIndex(),
q.CandidatePrimitiveIndex(),
q.CandidateGeometryIndex()))
{
if( (q.RayTMin() <= tHit) && (tHit <= q.CommittedRayT()) )
{
if(q.CandidateProceduralPrimitiveNonOpaque() &&
!MyProceduralAlphaTestLogic(
tHit,
attribs,
q.CandidateInstanceIndex(),
q.CandidatePrimitiveIndex(),
q.CandidateGeometryIndex()))
{
continue; // non opaque
}
q.CommitProceduralPrimitiveHit(tHit);
committedCustomAttribs = candidateAttribs;
}
}
break;
}
case CANDIDATE_NON_OPAQUE_TRIANGLE:
{
if( MyAlphaTestLogic(
q.CandidateInstanceIndex(),
q.CandidatePrimitiveIndex(),
q.CandidateGeometryIndex(),
q.CandidateTriangleRayT(),
q.CandidateTriangleBarycentrics(),
q.CandidateTriangleFrontFace() )
{
q.CommitNonOpaqueTriangleHit();
}
if(MyLogicSaysStopSearchingForSomeReason()) // not typically applicable
{
q.Abort(); // Stop traversing and next call to Proceed()
// will return FALSE.
// Post-traversal results will just be based
// on what has been encountered so far.
}
break;
}
}
}
switch(q.CommittedStatus())
{
case COMMITTED_TRIANGLE_HIT:
{
// Do hit shading
ShadeMyTriangleHit(
q.CommittedInstanceIndex(),
q.CommittedPrimitiveIndex(),
q.CommittedGeometryIndex(),
q.CommittedRayT(),
q.CommittedTriangleBarycentrics(),
q.CommittedTriangleFrontFace() );
break;
}
case COMMITTED_PROCEDURAL_PRIMITIVE_HIT:
{
// Do hit shading for procedural hit,
// using manually saved hit attributes (customAttribs)
ShadeMyProceduralPrimitiveHit(
committedCustomAttribs,
q.CommittedInstanceIndex(),
q.CommittedPrimitiveIndex(),
q.CommittedGeometryIndex(),
q.CommittedRayT());
break;
}
case COMMITTED_NOTHING:
{
// Do miss shading
MyMissColorCalculation(
q.WorldRayOrigin(),
q.WorldRayDirection());
break;
}
}
...
}
TraceRayInline example 3
(back to examples list)
Expensive scenario with multiple simultaneous traces:
RaytracingAccelerationStructure myAccelerationStructure : register(t3);
float4 MyPixelShader(float2 uv : TEXCOORD) : SV_Target0
{
...
RayQuery<RAY_FLAG_FORCE_OPAQUE> rayQ1;
rayQ1.TraceRayInline(
myAccelerationStructure,
RAY_FLAG_NONE,
myInstanceMask,
myRay1);
RayQuery<RAY_FLAG_FORCE_OPAQUE> rayQ2;
rayQ2.TraceRayInline(
myAccelerationStructure,
RAY_FLAG_NONE,
myInstanceMask,
myRay2);
// traverse rayQ1 and rayQ2 state machines simultaneously for some reason
...
// Assignment from another generates a reference:
RayQuery<RAY_FLAG_FORCE_OPAQUE> rayQ3 = rayQ2; // template config must match
// rayQ3 and rayQ2 are aliases of each other
...
// Reusing rayQ1 for a new query:
// This is the one part of this example that's more likely to be useful: tracing a ray
// sequentially after a previous trace is finished (so just reusing it's state for convenience).
// It's also fine to just declare a different query object, relying on the compiler
// to notice the lifetimes of each don't overlap.
rayQ1.TraceRayInline(
myAccelerationStructure,
RAY_FLAG_NONE,
myInstanceMask,
myRay1);
// This could be done any time, no need to wait for the original query to be in some state
// to be allowed to replace with a new trace.
}
RayQuery Proceed
bool RayQuery::Proceed();
This is the main worker function for an inline raytrace. While RayQuery::TraceRayInline() initializes the parameters for a raytrace, RayQuery::Proceed() is the function that causes the system to search the acceleration structure for hit candidates.
If candidates are found, they are either automatically processed in the case of opaque triangles, or the function returns to the shader (see TRUE below) for assistance in deciding what to do next - in particular when non-opaque triangles or procedural primitives are encountered.
| Parameter | Definition |
|---|---|
Return: bool |
<p>TRUE means there is a candidate for a hit that requires shader consideration. Calling RayQuery::CandidateType() after this reveals what the situation is.</p><p>FALSE means that the search for hit candidates is finished. Once RayQuery::Proceed() has returned FALSE for a given RayQuery::TraceRayInline(), further calls to RayQuery::Proceed() will continue to return FALSE and do nothing, unless the shader chooses to issue a new RayQuery::TraceRayInline() call on the RayQuery object.</p> |
For an inline raytrace to be at all useful,
RayQuery::Proceed()must be called at least once, and typically called repeatedly until it returnsFALSE, unless the shader chooses to just bail out of a search early for any reason.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery Abort
void RayQuery::Abort();
Force a ray query into the finished state. In particular, calls to RayQuery::Proceed() will return FALSE.
RayQuery::Abort() can be called any time after RayQuery::TraceRayInline() has been called.
RayQuery intrinsics also illustrates when this is valid to call.
This method is provided for convenience for telling an outer loop that calls
RayQuery::Proceed()such as below to break out, from within some nested code within the loop. The shader can accomplish the same thing manually as well, effectively abandoning a search. Either way, RayQuery::CommittedStatus() can be called to inform how to do any final shading.
while(rayQ.Proceed()) // `FALSE` after Abort() below
// (or search actually ended)
{
...
{
...
{
rayQ.Abort();
}
...
}
...
}
RayQuery CandidateType
CANDIDATE_TYPE RayQuery::CandidateType()
When RayQuery::Proceed() has returned TRUE and there is a candidate hit for the shader to evaluate, RayQuery::CandidateType() reveals what type of candidate it is.
| Parameter | Definition |
|---|---|
Return value: CANDIDATE_TYPE |
See CANDIDATE_TYPE. |
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateProceduralPrimitiveNonOpaque
bool RayQuery::CandidateProceduralPrimitiveNonOpaque()
When RayQuery::CandidateType() has returned CANDIDATE_PROCEDURAL_PRIMITIVE, this indicates whether the acceleration structure combined with ray flags consider this procedural primitive candidate to be non-opaque. The only action the system might have taken with this information is to cull opaque or non-opaque primitives if the shader requested it via RAY_FLAGS. If a candidate has been produced however, culling obviously did not apply. At this point it is completely up to the shader if it wants to act any further on this opaque/non-opaque information.
The shader could choose to not even both calling this method and make it’s own opacity determination for the procedural hits it finds, ignoring whatever the acceleration structure / ray flags may have decided.
RayQuery CommitNonOpaqueTriangleHit
void RayQuery::CommitNonOpaqueTriangleHit()
When RayQuery::CandidateType() has returned CANDIDATE_NON_OPAQUE_TRIANGLE and the shader determines this hit location is actually opaque, it needs to call RayQuery::CommitNonOpaqueTriangleHit(). RayQuery::CommitNonOpaqueTriangleHit() can be called multiple times per non opaque triangle candidate - after the first call, subsequent calls simply have no effect for the current candidate.
The system will have already determined this candidate hit T would > the ray’s TMin and < TMax (RayQuery::CommittedRayT()), so the shader need not manually verify these conditions.
Once committed, the system remembers hit properties like barycentrics, front/back facing of the hit, acceleration structure node information like PrimitiveIndex. As long as this remains the closest hit, RayQuery::CommittedTriangleBarycentrics() etc. will return the properties for this hit.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommitProceduralPrimitiveHit
void RayQuery::CommitProceduralPrimitiveHit(float tHit)
When RayQuery::CandidateType() has returned CANDIDATE_PROCEDURAL_PRIMITIVE, the shader is responsible for procedurally finding all intersections for this candidate. If the shader is manually accumulating transparency, it can do so manually without the system knowing this. The one responsibility the system expects of the shader is that it must only commit hit(s) when it manually determines that a given hit being reported satisfies TMin <= t <= TMax ( RayQuery::CommittedRayT()). When the range condiditon is satisfied, the shader can validly commit a hit via RayQuery::CommitProceduralPrimitiveHit(). See ray extents for some further discussion.
The shader must manually store (e.g. in local variables) any hit information that it might want later. The exception is data that the system tracks, such as the t value, or acceleration structure node information such as InstanceIndex, which can be retrieved via methods like RayQuery::CommittedInstanceIndex() for whatever the current closest commited hit is.
It is ok to call RayQuery::CommitProceduralPrimitiveHit() multiple times while processing a given candidate procedural primitive. In this case, each time it is called, the shader must ensure the hit being committed is within the most recent [TMin … TMax] (inclusive) range based on previous hits that have been committed. Another way to get the job done is to manually determine which one hit is closest in range (if any) and just commit once.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
float tHit |
t value for intersection that shader determined is closest so far and >= the ray’s TMin. |
RayQuery CommittedStatus
COMMITTED_STATUS CommittedStatus()
Status of the closest hit that has been committed so far (if any). This can be called any time after RayQuery::TraceRayInline() has been called.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
Return value: COMMITTED_STATUS |
See COMMITTED_STATUS. |
RayQuery RayFlags
This is a uint containing the current ray flags (template flags ORd with dynamic flags).
uint RayQuery::RayFlags();
This can be useful if, for instance, during handling of a procedural primitive candidatean app wants to look at the current ray’s culling flags and apply corresponding culling in its custom intersection code.
It is arguable that this method appears redundant given the shader could just remember what flags it originally passed into RayQuery::TraceRayInline(). The rationale is that since the system needs to keep this information anyway, no need for the app to waste a live register storing it, so in effect it can eliminate redundancy.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery WorldRayOrigin
The world-space origin for the current ray.
float3 RayQuery::WorldRayOrigin();
It is arguable that this method appears redundant given the shader could just remember what flags it originally passed into RayQuery::TraceRayInline(). The rationale is that since the system needs to keep this information anyway, no need for the app to waste a live register storing it, so in effect it can eliminate redundancy.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery WorldRayDirection
The world-space direction for the current ray.
float3 RayQuery::WorldRayDirection();
It is arguable that this method appears redundant given the shader could just remember what flags it originally passed into RayQuery::TraceRayInline(). The rationale is that since the system needs to keep this information anyway, no need for the app to waste a live register storing it, so in effect it can eliminate redundancy.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery RayTMin
This is a float representing the parametric starting point for the ray.
float RayQuery::RayTMin();
RayTMin defines the starting point of the ray according to the following
formula: Origin + (Direction \* RayTMin). Origin and Direction may be in
either world or object space, which results in either a world or an
object space starting point.
RayTMin is defined when calling RayQuery::TraceRayInline(), and is constant for the duration of that call.
It is arguable that this method appears redundant given the shader could just remember what flags it originally passed into RayQuery::TraceRayInline(). The rationale is that since the system needs to keep this information anyway, no need for the app to waste a live register storing it, so in effect it can eliminate redundancy.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateTriangleRayT
This is a float representing the parametric distance at which a candidate triangle for hit consideration lies.
float RayQuery::CandidateTriangleRayT();
CandidateTriangleRayT() defines the candidate point for non-opaque triangles along the ray according to the
following formula: Origin + (Direction * CandidateTriangleRayT). Origin and
Direction may be in either world or object space, which results in
either a world or an object space ending point.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedRayT
This is a float representing the parametric distance at which the closest committed hit so far lies.
float RayQuery::CommittedRayT();
CommittedRayT() defines the current TMax point along the ray according to the
following formula: Origin + (Direction * CommittedRayT). Origin and
Direction may be in either world or object space, which results in
either a world or an object space ending point.
CommittedRayT() is initialized by the RayQuery::TraceRayInline() call to
RayDesc::TMax, and updated during the trace query as new intersections are commited.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateInstanceIndex
The autogenerated index of the current instance in the top-level structure for the current hit candidate.
uint RayQuery::CandidateInstanceIndex();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateInstanceID
The user-provided InstanceID on the bottom-level acceleration structure
instance within the top-level structure for the current hit candidate.
uint RayQuery::CandidateInstanceID();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateInstanceContributionToHitGroupIndex
The user-provided InstanceContributionToHitGroupIndex on the bottom-level acceleration structure
instance within the top-level structure for the current hit candidate.
uint RayQuery::CandidateInstanceContributionToHitGroupIndex();
With inline raytracing, this value has no functional effect, even though the name describes contributing to hit group indexing. The name refers to the behavior with dynamic-shader-based raytracing. It is simply made available via RayQuery for completeness, enabling inline raytracing to see everything in an acceleration structure.
An app might use this a way to store another arbitrary user value per instance into instance data. Or it might be sharing an acceleration structure between dynamic-shader-based and inline raytracing: In the dynamic-shader-based case, the value participates in shader table indexing and in the inline case the app may achieve some similar equivalent effect manually indexing into its own data structures.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateGeometryIndex
The autogenerated index of the current geometry in the bottom-level acceleration structure for the current hit candidate.
uint RayQuery::CandidateGeometryIndex();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidatePrimitiveIndex
The autogenerated index of the primitive within the geometry inside the bottom-level acceleration structure instance for the current hit candidate.
uint RayQuery::CandidatePrimitiveIndex();
For D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES, this is the triangle
index within the geometry object.
For D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS,
this is the index into the AABB array defining the geometry object.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateObjectRayOrigin
Object-space origin for the current ray. Object-space refers to the space of the current bottom-level acceleration structure for the current hit candidate.
float3 RayQuery::CandidateObjectRayOrigin();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateObjectRayDirection
Object-space direction for the current ray. Object-space refers to the space of the current bottom-level acceleration structure for the current hit candidate.
float3 RayQuery::CandidateObjectRayDirection();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateObjectToWorld3x4
Matrix for transforming from object-space to world-space. Object-space refers to the space of the current bottom-level acceleration structure for the current hit candidate.
float3x4 RayQuery::CandidateObjectToWorld3x4();
The only difference between this and CandidateObjectToWorld4x3() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateObjectToWorld4x3
Matrix for transforming from object-space to world-space. Object-space refers to the space of the current bottom-level acceleration structure for the current hit candidate.
float4x3 RayQuery::CandidateObjectToWorld4x3();
The only difference between this and CandidateObjectToWorld3x4() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateWorldToObject3x4
Matrix for transforming from world-space to object-space. Object-space refers to the space of the current bottom-level acceleration structure for the current hit canddiate.
float3x4 RayQuery::CandidateWorldToObject3x4();
The only difference between this and CandidateWorldToObject4x3() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateWorldToObject4x3
Matrix for transforming from world-space to object-space. Object-space refers to the space of the current bottom-level acceleration structure for the current hit candidate.
float4x3 RayQuery::CandidateWorldToObject4x3();
The only difference between this and CandidateWorldToObject3x4() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedInstanceIndex
The autogenerated index of the instance in the top-level structure for the closest hit committed so far.
uint RayQuery::CommittedInstanceIndex();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedInstanceID
The user-provided InstanceID on the bottom-level acceleration structure
instance within the top-level structure for the closest hit committed so far.
uint RayQuery::CommittedInstanceID();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedInstanceContributionToHitGroupIndex
The user-provided InstanceContributionToHitGroupIndex on the bottom-level acceleration structure
instance within the top-level structure for the closest hit committed so far.
uint RayQuery::CommittedInstanceContributionToHitGroupIndex();
With inline raytracing, this value has no functional effect, even though the name describes contributing to hit group indexing. The name refers to the behavior with dynamic-shader-based raytracing. It is simply made available via RayQuery for completeness, enabling inline raytracing to see everything in an acceleration structure.
An app might use this a way to store another arbitrary user value per instance into instance data. Or it might be sharing an acceleration structure between dynamic-shader-based and inline raytracing: In the dynamic-shader-based case, the value participates in shader table indexing and in the inline case the app may implement some similar equivalent effect manually indexing into its own data structures.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedGeometryIndex
The autogenerated index of the geometry in the bottom-level acceleration structure for the closest hit committed so far.
uint RayQuery::CommittedGeometryIndex();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedPrimitiveIndex
The autogenerated index of the primitive within the geometry inside the bottom-level acceleration structure instance for the closest hit committed so far.
uint RayQuery::CommittedPrimitiveIndex();
For D3D12_RAYTRACING_GEOMETRY_TYPE_TRIANGLES, this is the triangle
index within the geometry object.
For D3D12_RAYTRACING_GEOMETRY_TYPE_PROCEDURAL_PRIMITIVE_AABBS,
this is the index into the AABB array defining the geometry object.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedObjectRayOrigin
Object-space origin for the ray. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float3 RayQuery::CommittedObjectRayOrigin();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedObjectRayDirection
Object-space direction for the ray. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float3 CommittedObjectRayDirection();
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedObjectToWorld3x4
Matrix for transforming from object-space to world-space. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float3x4 RayQuery::CommittedObjectToWorld3x4();
The only difference between this and CommittedObjectToWorld4x3() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedObjectToWorld4x3
Matrix for transforming from object-space to world-space. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float4x3 RayQuery::CommittedObjectToWorld4x3();
The only difference between this and CommittedObjectToWorld3x4() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedWorldToObject3x4
Matrix for transforming from world-space to object-space. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float3x4 RayQuery::CommittedWorldToObject3x4();
The only difference between this and CommittedWorldToObject4x3() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CommittedWorldToObject4x3
Matrix for transforming from world-space to object-space. Object-space refers to the space of the bottom-level acceleration structure for the closest hit committed so far.
float3x4 RayQuery::CommittedWorldToObject4x3();
The only difference between this and CommittedWorldToObject3x4() is the matrix is
transposed – use whichever is convenient.
RayQuery intrinsics illustrates when this is valid to call.
RayQuery CandidateTriangleBarycentrics
float2 RayQuery::CandidateTriangleBarycentrics
Applicable for the current hit candidate, if RayQuery::CandidateType() returns CANDIDATE_NON_OPAQUE_TRIANGLE. Returns hit location barycentric coordinates.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
Return value: float2 |
<p>Given attributes a0, a1 and a2 for the 3 vertices of a triangle, float2.x is the weight for a1 and float2.y is the weight for a2. For example, the app can interpolate by doing: a = a0 + float2.x \* (a1-a0) + float2.y\* (a2 -- a0).</p> |
RayQuery CandidateTriangleFrontFace
bool RayQuery::CandidateTriangleFrontFace
Applicable for the current hit candidate, if RayQuery::CandidateType() returns CANDIDATE_NON_OPAQUE_TRIANGLE. Reveals whether hit triangle is front of back facing.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
Return value: bool |
<p>TRUE means front face, FALSE means back face.</p> |
RayQuery CandidateTriangleObjectPositions
Not shipped yet, required as part of Shader Model 6.10.
BuiltInTrianglePositions RayQuery::CandidateTriangleObjectPositions()
May only be used if the hit BLAS was built with RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS. Otherwise behavior is undefined.
For clustered geometry, the operation that built the CLAS must have set D3D12_RTAS_OPERATION_FLAG_ALLOW_DATA_ACCESS, and the CLAS must not have been built with D3D12_RTAS_CLUSTER_OPERATION_CLAS_FLAG_DISALLOW_DATA_ACCESS. All CLAS referenced by a given cluster BLAS must have consistently chosen to allow data access or not when they were built, otherwise behavior is undefined.
RayQuery intrinsics illustrates when this is valid to call.
This intrinsic is a required feature in Shader Model 6.10.
| Parameter | Definition |
|---|---|
Return value: BuiltInTrianglePositions |
<p>Candidate hit triangle object position for specified vertex. See BuiltInTrianglePositions.</p> |
RayQuery CommittedTriangleBarycentrics
float2 RayQuery::CommittedTriangleBarycentrics
Applicable for the closest committed hit so far, if that hit is a triangle (which can be determined from RayQuery::CommittedStatus(). Returns hit location barycentric coordinates.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
Return value: float2 |
<p>Given attributes a0, a1 and a2 for the 3 vertices of a triangle, float2.x is the weight for a1 and float2.y is the weight for a2. For example, the app can interpolate by doing: a = a0 + float2.x \* (a1-a0) + float2.y\* (a2 -- a0).</p> |
RayQuery CommittedTriangleFrontFace
bool RayQuery::CommittedTriangleFrontFace
Applicable for the closest committed hit so far, if that hit is a triangle (which can be determined from RayQuery::CommittedStatus(). Reveals whether hit triangle is front of back facing.
RayQuery intrinsics illustrates when this is valid to call.
| Parameter | Definition |
|---|---|
Return value: bool |
<p>TRUE means front face, FALSE means back face.</p> |
RayQuery CommittedTriangleObjectPositions
Not shipped yet, required as part of Shader Model 6.10.
float3 RayQuery::CommittedTriangleObjectPositions()
May only be used if the hit BLAS was built with RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS. Otherwise behavior is undefined.
For clustered geometry, the operation that built the CLAS must have set D3D12_RTAS_OPERATION_FLAG_ALLOW_DATA_ACCESS, and the CLAS must not have been built with D3D12_RTAS_CLUSTER_OPERATION_CLAS_FLAG_DISALLOW_DATA_ACCESS. All CLAS referenced by a given cluster BLAS must have consistently chosen to allow data access or not when they were built, otherwise behavior is undefined.
RayQuery intrinsics illustrates when this is valid to call.
This intrinsic is a required feature in Shader Model 6.10.
| Parameter | Definition |
|---|---|
Return value: BuiltinTrianglePositions |
<p>Committed hit triangle object positions. See BuiltInTrianglePositions.</p> |
HitObject
This is part of the Shader Execution Reordering feature.
namespace dx {
HitObject
}
The HitObject type encapsulates information about a hit or a miss. It is constructed using HitObject::TraceRay, HitObject::FromRayQuery, HitObject::MakeMiss, or HitObject::MakeNop. It can be used to invoke closesthit or miss shading using HitObject::Invoke, and to reorder threads for shading coherence with MaybeReorderThread.
The HitObject has value semantics, so modifying one HitObject will not impact any other HitObject in the shader. A shader can have any number of active HitObjects at a time. Each HitObject will take up some hardware resources to hold information related to the hit or miss, including ray, intersection attributes and information about the shader to invoke. The size of a HitObject is unspecified, and thus considered intangible. As a consequence, HitObject cannot be stored in memory buffers, in groupshared memory, in ray payloads, or in intersection attributes. HitObject supports assignment (by-value copy) and can be passed as arguments to and returned from local inlined functions.
A HitObject is default-initialized to encode a NOP-HitObject (see HitObject::MakeNop). A NOP-HitObject can be used with HitObject::Invoke and MaybeReorderThread but does not call shaders or provide additional information for reordering. Most accessors will return zero-initialized values for a NOP-HitObject.
The HitObject type and related functions are available only in the following shader stages: raygeneration, closesthit, miss (the shader stages that may call TraceRay).
HitObject Interaction with Payload Access Qualifiers
Payload Access Qualifiers (PAQs) are based on how information flows between shader stages in TraceRay:
caller -> anyhit -> (closesthit|miss) -> caller
^ |
|__|
| With HitObject, control is returned to the caller after HitObject::TraceRay completed and hence caller is inserted between anyhit and (closesthit | miss): |
The flow for HitObject::TraceRay is:
caller -> anyhit -> caller
^ |
|__|
The flow for HitObject::Invoke is:
caller -> (closesthit|miss) -> caller
To allow interchangeability of payload types between TraceRay and the new execution model introduced with HitObject::TraceRay/HitObject::Invoke, the following additional PAQ rules apply:
- At the call to HitObject::TraceRay, any field declared as
read(miss)orread(closesthit)is treated asread(caller) - At the call to HitObject::Invoke, any field declared as
write(anyhit)is treated aswrite(caller)
HitObject TraceRay
Executes traversal (including anyhit and intersection shaders) and returns the resulting hit or miss information as a HitObject. Unlike TraceRay, this does not execute closesthit or miss shaders. The resulting payload is not part of the HitObject. See HitObject Interaction with Payload Access Qualifiers for details.
template<payload_t>
static dx::HitObject dx::HitObject::TraceRay(
RaytracingAccelerationStructure AccelerationStructure,
uint RayFlags,
uint InstanceInclusionMask,
uint RayContributionToHitGroupIndex,
uint MultiplierForGeometryContributionToHitGroupIndex,
uint MissShaderIndex,
RayDesc Ray,
inout payload_t Payload);
See TraceRay for parameter definitions.
The returned HitObject will always encode a hit or a miss, i.e. it will never be a NOP-Hitobject.
HitObject::TraceRay must not be invoked if the maximum trace recursion depth has been reached.
This function introduces a reorder point.
This is part of the Shader Execution Reordering feature.
HitObject FromRayQuery
Construct a HitObject representing the committed hit in a RayQuery. It is not bound to a shader table entry and behaves as NOP (no operation) if invoked. It can be used for reordering based on hit information. If no hit is committed in the RayQuery, the HitObject returned is a NOP object. A shader table entry can be assigned separately, which in turn allows invoking a shader.
An overload takes a user-defined hit kind and custom attributes associated with COMMITTED_PROCEDURAL_PRIMITIVE_HIT. It is ok to always use the overload, even for COMMITTED_TRIANGLE_HIT. For anything other than a procedural hit, the specified hit kind and attributes are ignored.
static dx::HitObject dx::HitObject::FromRayQuery(
RayQuery Query);
template<attr_t>
static dx::HitObject dx::HitObject::FromRayQuery(
RayQuery Query,
uint CommittedCustomHitKind,
attr_t CommittedCustomAttribs);
| Parameter | Definition |
|---|---|
Return: HitObject |
The HitObject that contains the result of the initialization operation. |
RayQuery |
RayQuery from which the hit is created. |
uint CommitedCustomHitKind |
See the HitKind parameter of ReportHit for definition. |
attr_t CommittedCustomAttribs |
See the Attributes parameter of ReportHit for definition. If a closesthit shader is invoked from this HitObject, attr_t must match the attribute type of the closesthit shader. |
The size of attr_t must not exceed MaxAttributeSizeInBytes specified in the D3D12_RAYTRACING_SHADER_CONFIG.
This is part of the Shader Execution Reordering feature.
HitObject MakeMiss
Construct a HitObject representing a miss, without tracing a ray. It is legal to construct a HitObject that differs from the result that would be obtained by passing the same parameters to HitObject::TraceRay, e.g. constructing a miss for a ray that would have hit some geometry if it were traced.
static dx::HitObject dx::HitObject::MakeMiss(
uint RayFlags,
uint MissShaderIndex,
RayDesc Ray);
Parameter | Definition
——— | ———-
Return: HitObject | The HitObject that contains the result of the initialization operation.
uint RayFlags | Valid combination of Ray flags as specified by TraceRay. Only defined ray flags are propagated by the system.
uint MissShaderIndex | The miss shader index, used to calculate the address of the shader table record. The miss shader index must reference a valid shader table record. Only the least significant 16 bits of this value are used.
RayDesc Ray | Ray for the miss.
This is part of the Shader Execution Reordering feature.
HitObject MakeNop
Construct a NOP-HitObject (no operation) that represents neither a hit nor a miss. This is the same as a default-initialized HitObject. NOP-Hitobjects can be useful in certain scenarios when combined with MaybeReorderThread, e.g. when a thread wants to participate in reordering without executing a closesthit or miss shader.
static dx::HitObject dx::HitObject::MakeNop();
| Parameter | Definition |
|---|---|
Return: HitObject |
The HitObject initialized to a NOP-HitObject. |
This is part of the Shader Execution Reordering feature.
HitObject Invoke
Execute closesthit or miss shading for the hit or miss encapsulated in a HitObject. The HitObject fully determines the system values accessible from the closesthit or miss shader. A NOP-HitObject or a HitObject constructed from a RayQuery without setting a shader table index will not invoke a shader and is effectively ignored.
The HitObject::Invoke call counts towards the trace recursion depth. It must not be invoked if the maximum trace recursion depth has already been reached. It is legal to call Invoke with the same HitObject multiple times. The HitObject is not modified by Invoke.
This function introduces a reorder point.
template<payload_t>
static void dx::HitObject::Invoke(
dx::HitObject Hit,
inout payload_t Payload);
| Parameter | Definition |
|---|---|
HitObject Hit |
HitObject that encapsulates information about the closesthit or miss shader to be executed. If the HitObject is a NOP-HitObject or a HitObject constructed from a RayQuery without setting a shader table index, then neither a closeshit nor a miss shader will be executed. |
payload_t Payload |
The ray payload. payload_t must match the type expected by the shader being invoked. See HitObject Interaction With Payload Access Qualifiers for details. |
It is legal to call HitObject::TraceRay with a different payload type than a subsequent HitObject::Invoke. One use case for this is a pipeline with anyhit shaders that require only a small payload, combined with closesthit shaders that read inputs from a large payload. Payload Access Qualifiers can express this situation, but don’t allow for as much optimization as using two different payloads with HitObject does. That is because anyhit would have to preserve the fields read by closesthit in the example above unnecessarily increasing register pressure on anyhit. Note that allowing different payload types within a hit group is not a spec change, because payload compatibility matters at runtime, not compile time. That is, at runtime, the payload type passed to the calling TraceRay/HitObject::TraceRay/HitObject::Invoke must match the payload type of the invoked shaders (only). With the introduction of HitObject, it can now be desirable for applications to create hit groups where the payload type in anyhit differs from the payload type in closesthit, whereas without HitObject this was merely legal but not particularly useful.
This is part of the Shader Execution Reordering feature.
HitObject IsMiss
bool dx::HitObject::IsMiss();
Returns true if the HitObject encodes a miss. If the HitObject encodes a hit or is a NOP-Hitobject, returns false.
This is part of the Shader Execution Reordering feature.
HitObject IsHit
bool dx::HitObject::IsHit();
Returns true if the HitObject encodes a hit. If the HitObject encodes a miss or is a NOP-Hitobject, returns false.
This is part of the Shader Execution Reordering feature.
HitObject IsNop
bool dx:HitObject::IsNop();
Returns true if the HitObject is a NOP-Hitobject, otherwise returns false.
This is part of the Shader Execution Reordering feature.
HitObject GetRayFlags
uint dx::HitObject::GetRayFlags();
Returns the ray flags associated with the hit object.
Returns 0 if the HitObject is a NOP-HitObject.
HitObject GetRayTMin
float dx::HitObject::GetRayTMin();
Returns the parametric starting point for the ray associated with the hit object.
Returns 0 if the HitObject is a NOP-HitObject.
This is part of the Shader Execution Reordering feature.
HitObject GetRayTCurrent
float dx::HitObject::GetRayTCurrent();
Returns the parametric ending point for the ray associated with the hit object. For a miss, the ending point indicates the maximum initially specified.
Returns 0 if the HitObject is a NOP-HitObject.
This is part of the Shader Execution Reordering feature.
HitObject GetWorldRayOrigin
float3 dx::HitObject::GetWorldRayOrigin();
Returns the world-space origin for the ray associated with the hit object.
If the HitObject is a NOP-HitObject, all components of the returned float3
will be zero.
This is part of the Shader Execution Reordering feature.
HitObject GetWorldRayDirection
float3 dx::HitObject::GetWorldRayDirection();
Returns the world-space direction for the ray associated with the hit object.
If the HitObject is a NOP-HitObject, all components of the returned float3
will be zero.
This is part of the Shader Execution Reordering feature.
HitObject GetObjectRayOrigin
float3 dx::HitObject::GetObjectRayOrigin();
Returns the object-space origin for the ray associated with the hit object.
If the HitObject encodes a miss, returns the world ray origin.
If the HitObject is a NOP-HitObject, all components of the returned float3
will be zero.
This is part of the Shader Execution Reordering feature.
HitObject GetObjectRayDirection
float3 dx::HitObject::GetObjectRayDirection();
Returns the object-space direction for the ray associated with the hit object.
If the HitObject encodes a miss, returns the world ray direction.
If the HitObject is a NOP-HitObject, all components of the returned float3
will be zero.
This is part of the Shader Execution Reordering feature.
HitObject GetObjectToWorld3x4
float3x4 dx::HitObject::GetObjectToWorld3x4();
Returns a matrix for transforming from object-space to world-space.
Returns an identity matrix if the HitObject does not encode a hit.
The only difference between this and HitObject::GetObjectToWorld4x3 is the matrix is transposed – use whichever is convenient.
This is part of the Shader Execution Reordering feature.
HitObject GetObjectToWorld4x3
float4x3 dx::HitObject::GetObjectToWorld4x3();
Returns a matrix for transforming from object-space to world-space.
Returns an identity matrix if the HitObject does not encode a hit.
The only difference between this and HitObject::GetObjectToWorld3x4 is the matrix is transposed – use whichever is convenient.
This is part of the Shader Execution Reordering feature.
HitObject GetWorldToObject3x4
float3x4 dx::HitObject::GetWorldToObject3x4();
Returns a matrix for transforming from world-space to object-space.
Returns an identity matrix if the HitObject does not encode a hit.
The only difference between this and HitObject::GetWorldToObject4x3 is the matrix is transposed – use whichever is convenient.
This is part of the Shader Execution Reordering feature.
HitObject GetWorldToObject4x3
float4x3 dx::HitObject::GetWorldToObject4x3();
Returns a matrix for transforming from world-space to object-space.
Returns an identity matrix if the HitObject does not encode a hit.
The only difference between this and HitObject::GetWorldToObject4x3 is the matrix is transposed – use whichever is convenient.
This is part of the Shader Execution Reordering feature.
HitObject GetInstanceIndex
uint dx::HitObject::GetInstanceIndex();
Returns the instance index of a hit.
Returns 0 if the HitObject does not encode a hit.
This is part of the Shader Execution Reordering feature.
HitObject GetInstanceID
uint dx::HitObject::GetInstanceID();
Returns the instance ID of a hit.
Returns 0 if the HitObject does not encode a hit.
This is part of the Shader Execution Reordering feature.
HitObject GetGeometryIndex
uint dx::HitObject::GetGeometryIndex();
Returns the geometry index of a hit.
Returns 0 if the HitObject does not encode a hit.
This is part of the Shader Execution Reordering feature.
HitObject GetPrimitiveIndex
uint dx::HitObject::GetPrimitiveIndex();
Returns the primitive index of a hit.
Returns 0 if the HitObject does not encode a hit.
This is part of the Shader Execution Reordering feature.
HitObject GetHitKind
uint dx::HitObject::GetHitKind();
Returns the hit kind of a hit. See HitKind for definition of possible values.
Returns 0 if the HitObject does not encode a hit.
This is part of the Shader Execution Reordering feature.
HitObject GetAttributes
template<attr_t>
attr_t dx::HitObject::GetAttributes();
Returns the attributes of a hit. attr_t must match the committed attributes’ type regardless of whether they were committed by an intersection shader, fixed function logic, or using HitObject::FromRayQuery.
If the HitObject does not encode a hit, the returned value will be zero-initialized. The size of attr_t must not exceed MaxAttributeSizeInBytes specified in the D3D12_RAYTRACING_SHADER_CONFIG.
This is part of the Shader Execution Reordering feature.
HitObject GetShaderTableIndex
uint dx::HitObject::GetShaderTableIndex()
Returns the index used for shader table lookups. If the HitObject encodes a hit, the index relates to the hit group table. If the HitObject encodes a miss, the index relates to the miss table. If the HitObject is a NOP-Hitobject, or a HitObject constructed from a RayQuery without setting
a shader table index, the return value is zero.
This is part of the Shader Execution Reordering feature.
HitObject SetShaderTableIndex
uint dx::HitObject::SetShaderTableIndex(uint RecordIndex)
Sets the index used for shader table lookups.
| Parameter | Definition |
|---|---|
uint RecordIndex |
The index into the hit or miss shader table. If the HitObject is a NOP-Hitobject, the value is ignored. |
If the HitObject encodes a hit, the index relates to the hit group table and only the bottom 28 bits are used:
HitGroupRecordAddress =
D3D12_DISPATCH_RAYS_DESC.HitGroupTable.StartAddress + // from: DispatchRays()
D3D12_DISPATCH_RAYS_DESC.HitGroupTable.StrideInBytes * // from: DispatchRays()
HitGroupRecordIndex; // from shader: HitObject::SetShaderTableIndex(RecordIndex)
If the HitObject encodes a miss, the index relates to the miss table and only the least significant 16 bits are used:
MissRecordAddress =
D3D12_DISPATCH_RAYS_DESC.MissShaderTable.StartAddress + // from: DispatchRays()
D3D12_DISPATCH_RAYS_DESC.MissShaderTable.StrideInBytes * // from: DispatchRays()
MissRecordIndex; // from shader: HitObject::SetShaderTableIndex(RecordIndex)
This is part of the Shader Execution Reordering feature.
HitObject LoadLocalRootTableConstant
uint dx::HitObject::LoadLocalRootTableConstant(uint RootConstantOffsetInBytes)
Load a local root table constant from the shader table. The offset is specified from the start of the local root table arguments, after the shader identifier. This function is particularly convenient for applications to “peek” at material properties or flags stored in the shader table and use that information to augment reordering decisions before invoking a hit shader.
RootConstantOffsetInBytes must be a multiple of 4.
If the HitObject is a NOP-Hitobject, or a HitObject constructed from a
RayQuery without setting a shader table index, the return value is zero.
This is part of the Shader Execution Reordering feature.
MaybeReorderThread
MaybeReorderThread provides an efficient way for the application to reorder work across the physical threads running on the GPU in order to improve the coherence and performance of subsequently executed code. The target ordering is given by the arguments passed to MaybeReorderThread. For example, the application can pass a HitObject, indicating to the system that coherent execution is desired with respect to a ray hit location in the scene. Reordering based on a HitObject is particularly useful in situations with highly incoherent hits, e.g., in path tracing applications.
MaybeReorderThread is available only in shaders of type raygeneration.
This function introduces a reorder point.
This is part of the Shader Execution Reordering feature.
Variants:
- MaybeReorderThread with HitObject
- MaybeReorderThread with coherence hint
- MaybeReorderThread with HitObject and coherence hint
Example and other information:
- Examples
- Reorder Points
- Divergence behavior
- Memory coherence and visibility
- Separation of MaybeReorderThread and HitObject::Invoke
- MaybeReorderThread and Invoke examples
MaybeReorderThread with HitObject
This variant of MaybeReorderThread reorders calling threads based on the information contained in a HitObject.
It is implementation defined which HitObject properties are taken into account when defining the ordering. For example, an implementation may decide to order threads with respect to their hit group index, hit locations in 3d-space, or other factors.
MaybeReorderThread may access both information about the instance in the
acceleration structure as well as the shader record at the shader table
offset contained in the HitObject. The respective fields in the HitObject
must therefore represent valid instances and shader table offsets.
NOP-HitObjects is an exception, which do not contain information about a hit
or a miss, but are still legal inputs to MaybeReorderThread. Similarly, a
HitObject constructed from a RayQuery but did not set a shader table
index is exempt from having a valid shader table record.
void dx::MaybeReorderThread( dx::HitObject Hit );
| Parameter | Definition |
|---|---|
HitObject Hit |
HitObject that encapsulates the hit or miss according to which reordering should be performed. |
This is part of the Shader Execution Reordering feature.
MaybeReorderThread with coherence hint
This variant of MaybeReorderThread reorders threads based on a generic
user-provided hint. Similarity of hint values should indicate expected
similarity of subsequent work being performed by threads. More significant
bits of the hint value are more important than less significant bits for
determining coherency. Specific scheduling behavior may vary by
implementation. The resolution of
the hint is implementation-specific. If an implementation cannot resolve all
values of CoherenceHint, it is free to ignore an arbitrary number of least
significant bits. The thread ordering resulting from this call may be
approximate.
void dx::MaybeReorderThread( uint CoherenceHint, uint NumCoherenceHintBitsFromLSB );
| Parameter | Definition |
|---|---|
uint CoherenceHint |
User-defined value that determines the desired ordering of a thread relative to others. |
uint NumCoherenceHintBitsFromLSB |
Indicates how many of the least significant bits in CoherenceHint the implementation should try to take into account. Applications should set this to the lowest value required to represent all possible values of CoherenceHint (at the given MaybeReorderThread call site). All threads should provide the same value at a given call site to achieve best performance. |
This is part of the Shader Execution Reordering feature.
MaybeReorderThread with HitObject and coherence hint
This variant of MaybeReorderThread reorders threads based on the information contained in a HitObject, supplemented by additional information expressed as a user-defined hint. The user-provided hint should mainly map properties that an implementation cannot infer from the HitObject itself. This can represent material- or other application-specific behavior. Examples include stochastic behavior such as loop termination by russian roulette in path tracing, or a material specific trait that is handled in a branch within a closeshit shader.
An implementation shold attempt to group threads both by information in the HitObject and by information in the coherence hint. The details of how this information is combined for reordering is implementation specific, but implementations should generally prioritize the hit group specified in the HitObject higher than the coherence hint. This lets applications use the coherence hint to reduce divergence from important branches within closesthit shaders, like the aforementioned material traits.
Note that the number of coherence hint bits that the implementation actually
honors can be smaller in this overload of MaybeReorderThread compared to the one
described in compared to the one described in MaybeReorderThread with coherence hint.
void dx::MaybeReorderThread(
dx::HitObject Hit,
uint CoherenceHint,
uint NumCoherenceHintBitsFromLSB );
| Parameter | Definition |
|---|---|
HitObject Hit |
HitObject that encapsulates the hit or miss according to which reordering should be performed. |
uint CoherenceHint |
User-defined value that determines the desired ordering of a thread relative to others. |
uint NumCoherenceHintBitsFromLSB |
Indicates how many of the least significant bits in CoherenceHint the implementation should try to take into account. Applications should set this to the lowest value required to represent all possible values of CoherenceHint (at the given MaybeReorderThread call site). All threads should provide the same value at a given call site to achieve best performance. |
This is part of the Shader Execution Reordering feature.
MaybeReorderThread Example 1
The following example shows a common pattern of combining HitObject and MaybeReorderThread:
// Trace a ray without invoking closesthit/miss shading.
HitObject hit = HitObject::TraceRay( ... );
// Reorder by hit point to increase coherence of subsequent shading.
MaybeReorderThread( hit );
// Invoke shading.
HitObject::Invoke( hit, ... );
MaybeReorderThread Example 2
The following pseudocode shows an example of reordering with coherence hints as it might be used in a simple path tracer.
for( int bounceCount=0; ; bounceCount++ )
{
// Trace the next ray
HitObject hit = HitObject::TraceRay( ray, payload, ... );
// Assume we have per-geometry albedo information stored in the Shader Table
float albedo = asfloat( hit.LoadLocalRootTableConstant(0) );
// Use the albedo information and current bounce count to estimate whether
// we're likely to exit the loop after shading the current hit, and turn
// that estimate into a coherence hint for reordering. Note that whether
// this estimate is correct or not only affects performance, not
// correctness.
bool probablyFinished = russianRoulette(albedo) || bounceCount >= maxBounces;
uint coherenceHints = probablyFinished ? 1 : 0;
// Reorder based on the hit, while taking into account how likely we are to
// exit the loop this round.
MaybeReorderThread( hit, coherenceHints, 1 );
// Invoke shading for the current hit. Due to the reordering performed
// above, this will have increased coherence.
HitObject::Invoke( hit, payload );
// Test whether the loop should actually exit, or whether we should compute
// the next light bounce.
if( payload.needsNextBounce && bounceCount < maxBounces )
ray = sampleNextBounce( ... );
else
break;
}
MaybeReorderThread Example 3
The following pseudocode shows another example of reordering used in the context of path tracing with a slightly different loop structure. In this case, NOP-Hitobject are used in reordering to ensure coherent execution not only of shaders, but also of the code after the loop.
for( int bounceCount=0; ; bounceCount++ )
{
HitObject hit; // initialize to NOP-hitobject
// Have threads conditionally participate in the next bounce depending on
// loop iteration count and path throughput. Instead of having
// non-participating threads break out of the loop here, we let them
// participate in the reordering with a NOP-hitobject first.
// This will cause them to be grouped together and execute the work after
// the loop with higher coherence. Note that the values of 'bounceCount'
// might differ between threads in a wave, because reordering may group
// threads from different iteration counts together if their hit locations
// are similar.
if( bounceCount < MaxBounces && throughput > ThroughputThreshold )
{
// Trace the next ray
hit = HitObject::TraceRay( ray, payload, ... );
}
// Reorder based on the ray hit. Some of the hit objects may be NOPs; these
// will be grouped together. Note that ordering by the type of hitobject
// (hit,miss,nop) can be expected to take precedence over ordering by the
// shader ID represented by the hitobject. This is as opposed to coherence
// hint bits, which have lower priority than the shader ID during
// reordering.
MaybeReorderThread( hit );
// Now that we've reordered, break non-participating threads out of the
// loop.
if( hit.IsNop() )
break;
// Execute shading and update path throughput.
HitObject::Invoke( hit, payload );
throughput *= payload.brdfValue;
}
// Assume significant work here that benefits from waves breaking out of the
// loop coherently.
<...>
Reorder points
The Wave Intrinsics section defines repacking points at TraceRay, CallShader and ReportHit. Shader Execution Reordering takes this concept further and refers to it as reorder points.
A reorder point is a point in the control flow of a shader or sequence of shaders where the system may arbitrarily change the physical arrangement of threads executing on the GPU, usually with the goal of increasing coherence. That is, the system may choose to migrate thread contexts that arrive at a reorder point to different processors, different waves or groups, or indices within waves or groups. Such migrations can be visible to the application if the application queries certain system state, such as group or thread IDs, wave lane indices, ballots, etc.
As mentioned, the base API in the absence of Shader Execution Reordering has reorder points due to TraceRay, CallShader and ReportHit. Shader Execution Reordering adds new reorder points. The following is a comprehensive list of existing and newly added reorder points:
- TraceRay: transitions to and from
anyhit,intersection,closesthit, andmissshaders. In the case of multipleanyhitorintersectionshader invocations, each shader stage transition is a separate reorder point. - CallShader: transitions to and from the
callableshader. - HitObject::TraceRay: transitions to and from
anyhitandintersectionshaders. In the case of multipleanyhitorintersectionshader invocations, each shader stage transition is a separate reorder point. - HitObject::Invoke: transitions to and from
closeshitandmissshaders. Constitutes a reorder point even in cases where no shader is invoked. - MaybeReorderThread: the
MaybeReorderThreadcall site.
MaybeReorderThread stands out as it explicitly separates reordering from a
transition between shader stages, thus, it allows applications to (carefully)
choose the most effective reorder locations given a specific workload. The
combination of HitObject and coherence hints provides additional control
over the reordering itself. These characteristics make MaybeReorderThread a
versatile tool for improving performance in a variety of workloads that suffer
from divergent execution or data access.
Similar to TraceRay and CallShader, the behavior of the actual reorder operation at any reorder point is implementation specific. An implementation may, for instance, not reorder at all, reorder within some local domain (threads on a local processor), reorder only within a certain time window, reorder globally across the entire GPU and the entire dispatch, or any variation thereof. The general target is for implementations to make a best effort to extract as much coherence as possible, while keeping the overhead of reordering low enough to be practical for use in typical raytracing scenarios.
While it is understood that reordering at TraceRay and CallShader is done
at the discretion of the driver, HitObject::TraceRay and HitObject::Invoke
are intended to be used in conjunction with MaybeReorderThread.
Reordering at HitObject::TraceRay and HitObject::Invoke is permitted but the
driver should minimize its efforts to reorder for hit coherence and instead
prioritize reordering through MaybeReorderThread.
Some implementations may achieve best performance when HitObject::TraceRay,
MaybeReorderThread, and HitObject::Invoke are called back-to-back.
This case is semantically equivalent to DXR 1.0 TraceRay but with defined
reordering characteristics.
The back-to-back combination of MaybeReorderThread and HitObject::Invoke may
similarly see a performance benefit on some implementations.
For performance reasons, it is crucial that the DXIL-generating compiler does
not move non-uniform resource access across reorder points in general, and across
MaybeReorderThread in particular. It should be assumed that the shader will perform
the access where coherence is maximized.
### MaybeReorderThread divergence behavior
An implementation may only reorder threads whose control flow arrives at a reorder point. Threads that do not arrive at a reorder point are guaranteed to not migrate, even if neighboring threads in the same wave do migrate.
From the physical wave’s point of view, an implementation may remove, replace, or do nothing with threads that arrive at a reorder point. It is also legal for an implementation to replace threads that were inactive at the start of the wave or those that exited the shader during execution, as long as any remaining thread reach a reorder point. This may indirectly affect threads that conditionally did not invoke a reorder point, as illustrated in the following code snippet:
int MyFunc(int coherenceCoord)
{
int A = WaveActiveBallot(true);
if (WaveIsFirstLane())
MaybeReorderThread(coherenceCoord, 32);
int B = WaveActiveBallot(true);
return A - B;
}
In this example, a number of different things could happen:
- If the implementation does not honor MaybeReorderThread at all, the function will most likely return zero, as the set of threads before and after the conditional reorder would be the same.
- If the implementation reorders threads invoking
MaybeReorderThreadbut does not replace them, B will likely be less than A for threads not invokingMaybeReorderThread, while the reordered threads will likely resume execution with a newly formed full wave, thereby obtainingA <= B. - If the implementation replaces threads in a wave, the threads not
participating in the reorder may possibly be joined by more threads than were
removed from the wave, again observing
A <= B.
This is part of the Shader Execution Reordering feature.
Reorder points - memory coherence and visibility
Due to the existence of non-coherent caches on most modern GPUs, an application must take special care when communicating information across reorder points through memory (UAVs). Shader Execution Reordering adds a coherence scope for communication between reorder points within the same dispatch index, as follows:
- A new
[reordercoherent]storage class for UAVs. - A new
REORDER_SCOPE = 0x8member in theSEMANTIC_FLAGenum for use in barriers.
Specifically, if UAV stores or atomics are performed on one side of a reorder point, and on the other side the data is read via non-atomic UAV reads, the following steps are required:
- The UAV must be declared
[reordercoherent]. - The UAV writer must issue a
Barrier(UAV_MEMORY, REORDER_SCOPE)between the write and the reorder point.
Note that these steps are required to ensure coherence across any reorder point.
For example, between a write performed before MaybeReorderThread or TraceRay and a
subsequent read in the same shader, or between shader stages (such as data written
in the closesthit shader and read in the raygeneration shader).
When communicating both between threads with different dispatch index and across reorder points the reorder coherence scope is insufficient. Instead, global coherency can be utilized as follows:
- The UAV must be declared
[globallycoherent]. - The UAV writer must issue a
DeviceMemoryBarrierbetween the write and the reorder point.
Separation of MaybeReorderThread and HitObject Invoke
MaybeReorderThread and HitObject::Invoke are kept separate. It enables calling
MaybeReorderThread without HitObject::Invoke, and HitObject::Invoke without
calling MaybeReorderThread. These are valid use cases as reordering can be
beneficial even when shading happens inline in the raygeneration shader, and
reordering before a known to be coherent or cheap shader can be
counterproductive. For cases in which both is desired, keeping MaybeReorderThread
and HitObject::Invoke separated is still beneficial as detailed below.
Common hit processing can happen in the raygeneration shader with the additional efficiency gains of hit coherence. Benefits include:
- Logic otherwise duplicated can be hoisted into the raygeneration shader without a loss of hit coherence. This can reduce instruction cache pressure and reduce compile times.
- Logic between
MaybeReorderThreadandHitObject::Invokehave access to the full state of the raygeneration shader. It can access a large material stack keeping track of surface boundaries, for example. This is difficult or impossible to communicate through the payload. - Modularity between the shader stages is improved by allowing hit shading to focus on surface logic. Different raygeneration shaders, and different call sites within a raygeneration shader, may want to vary how common logic is implemented. E.g., on first bounce a shadow ray may be fired after performing common light sampling. On a second bounce a shadow map lookup may be enough.
In addition to the above, API complexity is reduced by only having separate
calls, as opposed to both separate calls and a fused variant. Further,
MaybeReorderThread naturally communicates a reorder point, when hit-coherent
execution starts and that it will persist after the call (until the next
reorder point). Reasoning about the execution and that it is hit-coherent is
not as obvious after a call to a hypothetical (fused)
HitObject::ReorderAndInvoke. Finally, tools can report live state across
MaybeReorderThread and users can optimize live state across it. This is important
as live state across MaybeReorderThread may be more expensive on some
architectures.
Some examples follow.
MaybeReorderThread and Invoke example 1: Common computations that rely on large raygen state
In this example, a large number of surface events are tracked in the ray generation shader. Only the result is communicated to the invoked shader via the payload.
struct IorData
{
float ior;
uint id;
};
IorData iorList[16];
uint iorListSize = 0;
for( ... )
{
HitObject hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
IorData newEntry = LoadIorDataFromHit( hit );
bool enter = hit.GetHitKind() == HIT_KIND_TRIANGLE_FRONT_FACE;
payload.ior = UpdateIorList( newEntry, enter, iorList, iorListSize );
HitObject::Invoke( hit, payload );
}
MaybeReorderThread and Invoke example 2: Do common computations with hit coherence
In this example, common code runs in the raygeneration shader, after the thread has been reordered for hit coherence.
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
payload.giData = GlobalIlluminationCacheLookup( hit );
HitObject::Invoke( hit, payload );
MaybeReorderThread and Invoke example 3: Same surface shader but different behaviour in raygen
This example demonstrates varying reordering behavior and shadow logic, despite using the same shader code.
// Primary ray wants perfect shadows and does not need to explicitly
// reorder for hit coherence as it is coherent enough.
ray = GeneratePrimaryRay();
hit = HitObject::TraceRay( ... );
// NOTE: Although MaybeReorderThread is not explicitly invoked here,
// reordering can still occur at any reorder point based on
// driver-specific decisions.
RayDesc shadowRay = SampleShadow( hit );
payload.shadowTerm = HitObject::TraceRay( shadowRay ).IsHit() ? 0.0f : 1.0f;
HitObject::Invoke( hit, payload );
// Secondary ray is incoherent but does not need perfect shadows.
ray = ContinuePath( payload );
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
payload.shadowTerm = SampleShadowMap( hit );
HitObject::Invoke( hit, payload );
MaybeReorderThread and Invoke example 4: Unified shading
No hit shader is invoked in this example; however, reordering can still improve data coherence.
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
// Do not call HitObject::Invoke. Shade in raygeneration.
MaybeReorderThread and Invoke example 5: Coherently break render loop on miss
Executing the miss shader when not needed is unnecessarily inefficient on some architectures. In this example, miss shader execution is skipped.
Note that behavior can vary. Other architectures may have better efficiency
when HitObject::TraceRay, MaybeReorderThread and HitObject::Invoke are
called back-to-back (see Reorder Points).
for( ;; )
{
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
if( hit.IsMiss() )
break;
HitObject::Invoke( hit, payload );
}
MaybeReorderThread and Invoke example 6: Two-step shading, single reorder
In this example, shading is performed in two steps. The first step gathers material information, while the second step dispatches a common surface shader. This approach can help reduce shader permutations.
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
// Gather surface parameters into payload, e.g., compute normal and albedo
// based on surface-specific functions and/or textures.
HitObject::Invoke( hit, payload );
// Alter the hit object to point to a unified surface shader.
hit.SetShaderTableIndex( payload.surfaceShaderIdx );
// Invoke unified surface shading. We are already hit-coherent so it is not
// worth explicitly reordering again.
// Reordering may still occur at any reorder point based on driver-specific
// decisions.
HitObject::Invoke( hit, payload );
MaybeReorderThread and Invoke example 7: Live state optimization
In this example, logic is added to compress and uncompress part of the
payload across MaybeReorderThread.
This can make sense if live state is more expensive across MaybeReorderThread.
Some implementations may favor cases where HitObject::TraceRay, MaybeReorderThread
and HitObject::Invoke are called back-to-back (see Reorder Points),
so performance profiling is necessary.
hit = HitObject::TraceRay( ... );
uint compressedNormal = CompressNormal( payload.normal );
MaybeReorderThread( hit );
payload.normal = UncompressNormal( compressedNormal );
HitObject::Invoke( hit, payload );
MaybeReorderThread and Invoke example 8: Back-to-back calls
This example demonstrates the back-to-back arrangement of HitObject::TraceRay, MaybeReorderThread, and HitObject::Invoke. For some architectures, this arrangement is the most efficient, as it can be recognized as a single reorder point, reducing call overhead (see Reorder Points).
Additional logic between these calls should only be added when necessary.
hit = HitObject::TraceRay( ... );
MaybeReorderThread( hit );
HitObject::Invoke( hit, payload );
Payload access qualifiers
Shader models 6.6 and 6.7 add payload access qualifiers (PAQs) to the ray payload structure. PAQs are annotations which describe the read and write semantics of a payload field, that is, which shader stages read or write a given field. The added semantic information can help implementations reduce register pressure and can avoid spilling of payload state to memory. This incentivizes the use of the narrowest-possible qualifiers for each payload field.
Availability
Prior to shader model 6.6, payload access qualifiers (PAQs) are not supported.
With SM 6.6, PAQs are disabled by default. The user may opt-in to the feature by using the
-enable-payload-qualifiers command line flag in DXC.
With SM 6.7 and higher, PAQs are enabled by default. The user may opt-out of the feature by using the
-disable-payload-qualifiers command line flag in DXC.
It is legal to mix annotated and unannotated payloads within the same library / state object.
Payload size
With payload access qualifiers (PAQs), the MaxPayloadSizeInBytes property of D3D12_RAYTRACING_SHADER_CONFIG is no longer needed. The field is ignored by drivers if PAQs are enabled (the default per above) in SM 6.7 or higher.
For SM 6.7 and higher but with PAQs disabled, MaxPayloadSizeInBytes is still used.
For SM 6.6, in order to ease the transition for driver implementers, applications must still set the MaxPayloadSizeInBytes regardless of whether PAQs are used or not.
Syntax
Any structure type used as payload must carry the [raypayload] type attribute as part of the type declaration as follows:
struct [raypayload] MyPayload{ ... };
Only structs marked as payload as shown above can be used as argument to TraceRay calls and as payload parameter in closesthit, anyhit or miss shaders.
Payload types require annotating each member variable with PAQs. The payload access qualifier (PAQ) syntax follows the syntax of resource bindings. A valid annotation follows this syntax:
Type Field : qualifier1([s0, s1, ...]) : qualifier2([s0, s1, ...]);
The two valid qualifiers are read and write. Each qualifier carries an argument list, containing the shader stages it applies to (s0..sN in the above definition). Valid shader stages are: anyhit, closesthit, miss, caller.
Each field must declare one read and one write qualifier. Qualifier argument lists can be empty.
PAQs can only be specified for scalar, array, struct, vector, or matrix types. For payload types containing other types (i.e., structs with PAQs), the PAQs must be specified in the nested type and directly annotating the member is not allowed.
Semantics
Generally speaking, the read qualifier indicates that a shader stage reads the payload field, and the write qualifier indicates that a shader stage writes to the field.
For the application developer, the following classification provides a description of the qualifier’s behavior that should suffice as a mental model in most scenarios. For a more precise definition of the semantics, see the next section.
anyhit/closesthit/miss stages
| qualifier | semantic |
|---|---|
read |
<p>Indicates that for the given stage, the payload field is available for reading and will contain the last value written by a previous stage.</p> |
write |
<p>Indicates that the payload field will be overwritten by the given stage, if the stage executes. The field will be overwritten regardless of whether the executed shader explicitly assigns a value. If a value is not explicitly written by the shader, then an undefined value is written to the payload field at the end of the shader.</p><p>If the given stage does not execute, the payload field remains unmodified. A shader stage may not execute for various reasons. Examples include ray flags (FORCE_OPAQUE does not execute anyhit, SKIP_CLOSESTHIT does not execute closesthit) or dynamic behavior (rays that miss all geometry do not execute closeshit, rays that hit geometry do not execute miss, etc).</p><p>Note that invoking a NULL shader identifier in the Shader Table is equivalent to executing an empty shader, so in that case the stage counts as executed.</p> |
read+write |
<p>Indicates that the given stage may read and/or write the payload field. This is analogous to inout function parameters. If the shader does not explicitly assign a value or if the stage is not executed, the payload field remains unmodified.</p> |
<none> |
<p>The payload field is neither available for reading nor are its contents modified by the given stage.</p> |
caller stage
The caller stage denotes the caller of the TraceRay function (i.e., most commonly a raygeneration shader). Fields that represent “inputs” to TraceRay (for example a random seed) must first be written by the caller, so the payload access qualifier (PAQ) for such fields must include write(caller). Fields that represent “outputs” from TraceRay (for example an output color) must be read by the caller,
so the PAQ for such fields must include read(caller). Fields can be both inputs and outputs to TraceRay by specifying both read(caller) and write(caller).
Detailed semantics
Payload access qualifiers (PAQs) take effect at the transition between shader stages. A shader stage transition occurs when calling or returning from TraceRay, or any time an anyhit/closesthit/miss shader is entered or exited. Conceptually, each shader stage that receives a payload as an argument creates the payload parameter as a local working copy of the actual payload attached to the ray. The PAQs then determine which fields are copied between the local copy and the actual payload when entering and exiting the shader stage.
Specifically, the following semantics apply:
- At the beginning of a TraceRay call, any fields of the payload type that are marked
write(caller)are copied from the payload argument passed to TraceRay into the actual payload. All other fields of the actual payload have undefined contents. - At the beginning of execution of a shader stage that receives a payload, any fields that are marked
readfor that stage are copied from the actual payload to the parameter the shader receives. All other fields of the input parameter are left undefined. - At the end of execution of a shader stage that receives a payload, any fields that are marked
writefor that stage are copied back from the parameter of the shader to the actual payload. Any values written to other fields of the parameter are ignored. - At the end of execution of a TraceRay call, any fields of the payload type that are marked
read(caller)are copied from the actual payload back to the payload argument passed to TraceRay. All other fields of the payload parameter will have undefined contents.
The implementation can organize the actual payload however it wants, and need only preserve the values of payload fields that have well-defined values and might possibly be read in the future.
See Value preservation across stage transitions in the Advanced examples section for step-by-step walkthroughs of how these rules apply to writes by unqualified stages and recursive TraceRay calls.
Local working copy
Because payload access qualifiers (PAQs) only affect stage transitions, the compiler does not restrict how shaders may access the local working copy of the payload; the local copy behaves exactly like an un-annotated struct variable. This ensures that variables of payload type can freely be assigned to each other. In particular, it also enables passing payloads as function arguments (in which case in/out semantics apply just like they would for regular struct parameters).
It is the responsibility of the developer to ensure that shaders honor the specified PAQs when accessing payload fields to achieve the desired behavior. To help guard the developer against unintended effects, the compiler will attempt to warn whenever accesses are detected that could lead to undefined values or ignored writes.
Shader stage sequence
The general sequence of relevant shader stages is as follows. (intersection shaders are left out because they cannot access payloads).
caller -> anyhit -> (closesthit|miss) -> caller
^ |
|__|
Because multiple anyhit shaders can be executed during the course of a TraceRay operation, ‘anyhit’ both precedes and succeeds itself.
A TraceRay call may not invoke any shaders at all (e.g. a ray that hits triangle geometry marked as opaque, while also specifying the SKIP_CLOSESTHIT ray flag). In that case, payload access qualifiers still apply to the caller -> caller transition.
The following rules are enforced by the compiler at the payload declaration:
- Any
readstage must be preceded by awritestage - Any
writestage must be succeeded by areadstage
For a HitObject (part of the Shader Execution Reordering feature) the semantics are described here: HitObject Interaction With Payload Access Qualifiers.
Example
An example payload structure with payload access qualifiers is shown below:
struct Nested { float a, b, c; }
struct [raypayload] MyPayload
{
// "Pure" output from closesthit or miss:
float4 irradiance : read(caller) : write(closesthit, miss);
// "Pure" input into all stages, not preserved over TraceRay
uint seed : read(anyhit,closesthit,miss) : write(caller);
// Simple input into all stages, preserved over TraceRay
uint seed : read(anyhit,closesthit,miss,caller) : write(caller);
// In-out flag, overwritten by miss (e.g. for shadow/visibility):
bool hasHit : read(caller) : write(caller,miss);
// Anyhits communicating amongst themselves, with initialization from caller
float a : read(anyhit) : write(caller,anyhit);
// Nested struct which itself does not have PAQs:
Nested n : read(caller) : write(closesthit,miss);
// Nested payload struct which itself has PAQs:
MyBasePayload base;
};
Guidelines
Here are some guidelines to help developers specify payload access qualifier definitions correctly:
- Does the caller need to initialize the field before calling TraceRay Add
callertowrite. - Does the caller use the returned field after calling TraceRay (including in cases like loops)? Add
callertoread. - Does any shader of an anyhit/closesthit/miss stage read the field, but no shader in the same stage ever writes it? Add the corresponding shader stage to
readbut notwrite. - Do all shaders of an anyhit/closesthit/miss stage write the field unconditionally and never read it? Add the corresponding shader stage to
writebut notread. - Does any anyhit/closesthit/miss shader conditionally modify the field, or do some shaders in the stage write the field while others don’t? Try to make the
writeunconditional in all shaders and apply guideline (4). If that is not possible, add the stage to bothreadandwrite. - Specify as few qualifiers/stages as possible for maximum performance. Try to make fields “pure inputs” or “pure outputs” (see later examples) where possible.
Optimization potential
1) Shortened lifetimes
struct [raypayload] MyPayload
{
float ahInput : write(caller) : read(anyhit);
};
In this example, ahInput is not accessed after the anyhit stage, that is, its lifetime ends after anyhit. The implementation is therefore free to ignore this field for subsequent stages, which can reduce shader register pressure in closesthit and miss shaders.
2) Disjoint lifetimes
struct [raypayload] MyPayload
{
float alpha : write(caller,anyhit) : read(closesthit);
bool didHit : write(closesthit, miss) : read(caller);
...
};
In this example, the lifetime of alpha will end once the closesthit shader has read the value and resources (e.g. registers) allocated for alpha are free to be reused. Since the lifetimes of alpha and didHit are now provably disjoint, the implementation is allowed to reuse alpha’s register to propagate didHit back to the caller of TraceRay.
Advanced examples
Various accesses and recursive TraceRay
struct [raypayload] Payload
{
float a : write(closesthit, miss) : read(caller);
float b : write(miss) : read(caller);
float c : write(caller, closesthit) : read(caller, closesthit);
float d : write(caller) : read(closesthit, miss);
};
[shader("closesthit")]
void ClosestHit(inout Payload payload)
{
float tmp1 = payload.a; // WARNING: reading undefined value ('a' not read(closesthit))
float tmp2 = payload.b; // WARNING: reading undefined value ('b' not read(closesthit))
float tmp3 = payload.c;
float tmp4 = payload.d;
payload.a = 3;
payload.b = 3; // WARNING: write will be ignored after CH returns ('b' not write(closesthit))
payload.c = 3;
payload.d = 3; // WARNING: write will be ignored after CH returns ('d' not write(closesthit))
Payload p;
p.a = 3; // WARNING: value will be undefined inside TraceRay ('a' not write(caller))
p.b = 3; // WARNING: value will be undefined inside TraceRay ('b' not write(caller))
p.c = 3;
p.d = 3;
TraceRay(p);
float tmp5 = p.a;
float tmp6 = p.b;
float tmp7 = p.c;
float tmp8 = p.d; // WARNING: reading undefined value ('d' not read(caller))
Payload p2 = payload; // copying entire payload is OK, but inherits any potential undefined values
TraceRay(p2);
}
Payload as function parameter
struct [raypayload] MyPayload
{
float a : write(caller, closesthit, miss) : read(caller);
};
// could also use plain 'in' or 'out', behaves like normal struct parameter
void foo(inout MyPayload p)
{
p.a = 123;
}
[shader(“closesthit”)]
void ClosestHit(inout MyPayload p)
{
foo(p);
}
Forwarding payloads to recursive TraceRay calls
struct [raypayload] MyPayload
{
float pureInput : write(caller) : read(closesthit);
float pureOutput : write(closesthit) : read(caller);
};
[shader(“closesthit”)]
void ClosestHit(inout MyPayload p)
{
// undefined contents due to lack of read(closesthit) and write(caller)
float a = p.pureOutput;
// This write will not be visible inside recursive closesthit stages, due to
// the lack of write(caller) and read(closesthit) annotations. Once the recursive
// TraceRay call returns, the value of p.pureOutput will be whatever the recursive
// closesthit invocation assigned, or undefined if the recursive invocation did
// not assign anything.
p.pureOutput = 222;
// This write will be visible inside the recursive closesthit stages, thanks to
// write(caller). We are operating on the local copy of the payload here, so the
// fact that p.pureInput does not specify write(closesthit) is irrelevant for this
// point (it only matters at the stage transition out of closeshit).
p.pureInput = 123;
TraceRay(p);
float c = p.pureInput; // now undefined due to lack of read(caller)
float d = p.pureOutput; // result of recursive TraceRay, or undefined
// if the recursion didn't write
p.pureOutput = 444; // visible to the caller
}
Pure input in a loop
struct [raypayload] MyPayload
{
float pureInput : write(caller) : read(closesthit);
};
[shader(“raygeneration”)]
void Raygen()
{
MyPayload p;
p.pureInput = 123;
while (condition)
{
// p.pureInput will be undefined after the first
// loop iteration. Either specify read(caller)
// to preserve the value or manually keep a copy
// of the value live across the TraceRay call.
TraceRay(p);
}
}
Conditional pure output overwriting initial value
struct [raypayload] MyPayload
{
float pureOutput : write(caller,closesthit) : read(caller);
};
[shader(“closesthit”)]
void ClosestHit(inout MyPayload p)
{
if( condition )
p.pureOutput = 123;
else
{
// p.pureOutput becomes undefined because we do not
// write it explicitly and omit read(closeshit)
}
}
Value preservation across stage transitions
The following examples illustrate how the detailed semantics copy rules interact with writes to fields that a shader stage is not qualified to write, and with recursive TraceRay calls that forward the payload.
Example 1 - Writing to a field without write qualification
struct [raypayload] MyPayload
{
float callerValue : write(caller) : read(caller);
};
[shader("raygeneration")]
void Raygen()
{
MyPayload p;
p.callerValue = 0;
TraceRay(/* ... */, p);
// p.callerValue is guaranteed to be 0.
}
[shader("closesthit")]
void ClosestHit(inout MyPayload p, in BuiltInTriangleIntersectionAttributes a)
{
p.callerValue = 1; // Legal write to the local copy, but ignored on copy-back.
}
Here, callerValue is only marked write(caller), not
write(closesthit). Per the detailed semantics:
- The caller writes 0, and
write(caller)copies 0 into the actual payload. - When the closesthit shader begins,
callerValueis not markedread(closesthit), so the local copy’s value is undefined. - The closesthit shader writes 1 to its local copy. This is legal - shaders may freely read and write their local working copy.
- When closesthit exits,
callerValueis not markedwrite(closesthit), so the write is not copied back to the actual payload. The actual payload still contains 0. - When TraceRay returns,
read(caller)copies the actual payload’s value (0) back to the caller.
Result: p.callerValue is guaranteed to be 0 after
TraceRay returns. The closesthit shader’s write to its
local copy has no effect on the actual payload.
The compiler should emit a warning for the write in closesthit because the value will be discarded, but it is not an error.
Example 2 - Recursive TraceRay with payload forwarding
struct [raypayload] MyPayload
{
float callerValue : write(caller) : read(caller);
};
[shader("raygeneration")]
void Raygen()
{
MyPayload p;
p.callerValue = 0;
TraceRay(/* ... */, p);
// p.callerValue is guaranteed to be 0.
}
[shader("closesthit")]
void ClosestHit(inout MyPayload p, in BuiltInTriangleIntersectionAttributes a)
{
p.callerValue = 1;
TraceRay(/* ... */, p); // Forwards the payload to a nested TraceRay.
// p.callerValue is 1 here.
}
In this example, the closesthit shader modifies callerValue in its
local copy and then calls a nested TraceRay, forwarding the
payload. Each TraceRay call operates on its own actual
payload:
- Outer TraceRay: The caller (Raygen) writes 0;
write(caller)copies 0 into the outer actual payload. - Outer closesthit begins:
callerValueis not markedread(closesthit), so the local copy starts with an undefined value. - Closesthit writes 1 to its local copy.
- Inner TraceRay: Closesthit is now the caller of this
TraceRay.
write(caller)copies 1 from the local copy into the inner actual payload. - Inner TraceRay returns:
read(caller)copies from the inner actual payload back to closesthit’s local copy. Assuming no inner shader modifies the field,callerValueis still 1 in the local copy. - Outer closesthit exits:
callerValueis not markedwrite(closesthit), so the local value (1) is not copied back to the outer actual payload. The outer actual payload still contains 0. - Outer TraceRay returns:
read(caller)copies the outer actual payload’s value (0) back to Raygen.
Result: The outer caller (Raygen) always observes
p.callerValue == 0. The closesthit shader observes
p.callerValue == 1 after its nested TraceRay. Each
TraceRay has its own actual payload, and closesthit’s
writes are not propagated to the outer actual payload because the field
lacks write(closesthit).
Payload access qualifiers in DXIL
Payload Access Qualifiers (PAQs) are represented as metadata in DXIL, like type annotations. In contrast to type annotations, PAQs are attached to the dx.dxrPayloadAnnotations metadata node which references a single node that contains tag kDxilPayloadAnnotationStructTag(0) followed by a list of pairs consisting of an undef value of the payload type and a metadata node reference.
!dx.dxrPayloadAnnotations = !{!24}
|--->!24 = !{i32 0, %struct.Payload undef, !25, %struct.MyColor undef, !29}
|--->!25 = !{!26, !27, !28}
| |--->!26 = !{i32 0, i32 0}
| |--->!27 = !{i32 0, i32 819}
| |--->!28 = !{i32 0, i32 51}
|--->!29 = !{!30, !30, !30}
|--->!30 = !{i32 0, i32 545}
The referenced metadata node must contain another reference to per-field metadata, hence every field in the payload type must be represented by one metadata note and the order must match the type’s layout.
The per-field metadata contains the kDxilPayloadFieldAnnotationAccessTag(0) followed by a bitmask that stores the PAQs for this field. For each shader stage 4 bits are used in the bitmask. Bits 0-1 are used for the PAQs. Bit 0 is set it indicates that the shader stage has read access, bit 1 indicates write access.
The bits for each stage are:
| Stage | Bits |
|---|---|
| Caller | 0-3 |
| Closesthit | 4-7 |
| Miss | 8-11 |
| Anyhit | 12-15 |
Note: A field declared with another payload type must not have any bits set. The payload access information must be taken from the payload type, not the field.
DDI
General notes
Descriptor handle encodings
Recall that shader tables, containing application defined data, can hold 8 byte GPU descriptor handles when they are present in local root signatures.
Descriptor handles are generated by the app by adding a driver defined descriptor increment to a descriptor heap base address (also reported by the driver to the app). It is required that descriptor handles are globally unique across all descriptor heaps (regardless of descriptor heap type). This ensures that tools and the debug layer can cheaply understand the intent of the application when it places a descriptor in a shader table. It can be validated, for instance, that descriptors referenced by shader tables come from the descriptor heap currently bound on the command list (as opposed to being stale descriptor handles pointing into a previously used descriptor heap, or invalid descriptors).
State object DDIs
See State objects for an overview. DDIs generally mirror APIs (and follow DDI patterns in the rest of D3D12). Notable exceptions are called out below.
State subobjects
Most subobjects mirror the API, with exceptions listed here:
The runtime passes down any subjects that have been defined directly in DXIL libraries as plain subobjects in the DDI (the driver won’t find the subobjects in the DXIL library that it gets).
The runtime also converts any subobject association definitions including default associations into an explicit list of associations for every exported function. So the driver doesn’t have try to understand any rules about which subobjects need to be associated with which functions.
D3D12DDI_STATE_SUBOBJECT_TYPE
typedef enum D3D12DDI_STATE_SUBOBJECT_TYPE
{
D3D12DDI_STATE_SUBOBJECT_TYPE_STATE_OBJECT_CONFIG = 0, // D3D12DDI_STATE_OBJECT_CONFIG_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_GLOBAL_ROOT_SIGNATURE = 1, // D3D12DDI_GLOBAL_ROOT_SIGNATURE_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_LOCAL_ROOT_SIGNATURE = 2, // D3D12DDI_LOCAL_ROOT_SIGNATURE_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_NODE_MASK = 3, // D3D12_NODE_MASK_0054
// 4 unused
D3D12DDI_STATE_SUBOBJECT_TYPE_DXIL_LIBRARY = 5, // D3D12DDI_DXIL_LIBRARY_DESC_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_EXISTING_COLLECTION = 6, // D3D12DDI_EXISTING_COLLECTION_DESC_0054
// skip value from API not needed in DDI
// skip value from API not needed in DDI
D3D12DDI_STATE_SUBOBJECT_TYPE_RAYTRACING_SHADER_CONFIG = 9, // D3D12DDI_RAYTRACING_SHADER_CONFIG_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_RAYTRACING_PIPELINE_CONFIG = 10, // D3D12DDI_RAYTRACING_PIPELINE_CONFIG_0054
D3D12DDI_STATE_SUBOBJECT_TYPE_HIT_GROUP = 11, //
D3D12DDI_HIT_GROUP_DESC_0054
// DDI only objects
D3D12DDI_STATE_SUBOBJECT_TYPE_SHADER_EXPORT_SUMMARY = 0x100000, // D3D12DDI_FUNCTION_SUMMARY_0054
} D3D12DDI_STATE_SUBOBJECT_TYPE;
State object types driver sees. Note the list isn’t exactly the same as what exists at the API: D3D12_STATE_OBJECT_TYPE. As discussed above, association subobjects at the API are converted into a per-function association list - D3D12DDI_FUNCTION_SUMMARY_0054.
The definitions of the various other DDI subobjects is omitted as they
are identical to the API equivalents documented
here. Minor exceptions where DDI subobject
definitions differ slightly: in cases where in the API a subobject
contains an API COM interface, the DDI contains the DDI handle. For
example the ID3D12RootSignature* in D3D12_GLOBAL_ROOT_SIGNATURE
appears in the DDI equivalent subobject, D3D12DDI_GLOBAL_ROOT_SIGNATURE_0054,
with D3D12DDI_HROOTSIGNATURE hGlobalRootSignature.
D3D12DDI_STATE_SUBOBJECT_0054
typedef struct D3D12DDI_STATE_SUBOBJECT_0054
{
D3D12DDI_STATE_SUBOBJECT_TYPE Type;
const void* pDesc;
} D3D12DDI_STATE_SUBOBJECT_0054;
| Parameter | Definition |
|---|---|
D3D12DDI_STATE_SUBOBJECT_TYPE Type |
Type of subobject. See D3D12DDI_STATE_SUBOBJECT_TYPE. |
const void* pDesc |
<p>Pointer to subobject whose contents depend on Type. For instance if Type is D3D12DDI_STATE_SUBOBJECT_TYPE_LOCAL_ROOT_SIGNATURE, the pDesc points to D3D12DDI_GLOBAL_ROOT_SIGNATURE_0054.</p><p>Any data within the subobjects including shader bytecode is remains valid for the lifetime of the state object, as the memory is owned by the runtime, with no references to data the app passed in to CreateStateObject. So the app doesn’t have to keep its creation data around and the driver doesn’t need to make copies of any part of a state object definition.</p> |
D3D12DDI_STATE_SUBOBJECT_TYPE_SHADER_EXPORT_SUMMARY
D3D12DDI_STATE_SUBOBJECT_TYPE_SHADER_EXPORT_SUMMARY is a DDI subobject generated by the runtime during its state object validation and creation process. This provides any information the runtime determined, such as which subobjects have been associated with any given export, including resolving any defaults.
See Subobject association behavior for a discussion about how subobject associations work at the API. At the DDI, the driver simply sees the results of the association rules.
D3D12DDI_FUNCTION_SUMMARY_0054
typedef struct D3D12DDI_FUNCTION_SUMMARY_0054
{
UINT NumExportedFunctions;
_In_reads_(NumExportedFunctions) const
D3D12DDI_FUNCTION_SUMMARY_NODE_0054* pSummaries;
D3D12DDI_EXPORT_SUMMARY_FLAGS OverallFlags;
} D3D12DDI_FUNCTION_SUMMARY_0054;
Descriptions of all exported functions in a state object.
| Parameter | Definition |
|---|---|
UINT NumExportedFunctions |
How many functions are exported by the current state object. Size of pSummaries array. |
_In_reads_(NumExportedFunctions) const D3D12DDI_FUNCTION_SUMMARY_NODE_0054* pSummaries |
Array of D3D12DDI_FUNCTION_SUMMARY_NODE_0054. |
D3D12DDDI_EXPORT_SUMMARY_FLAGS OverallFlags |
Properties of the state object overall. See D3D12_EXPORT_SUMMARY_FLAGS. This is the aggregate of the flags for each individual export. See Flags in D3D12DDI_FUNCTION_SUMMARY_NODE_0054. |
D3D12DDI_FUNCTION_SUMMARY_NODE_0054
typedef struct D3D12DDI_FUNCTION_SUMMARY_NODE_0054
{
LPCWSTR ExportNameUnmangled;
LPCWSTR ExportNameMangled;
UINT NumAssociatedSubobjects;
_In_reads_(NumAssociatedSubobjects) const
D3D12DDI_STATE_SUBOBJECT_0054*const* ppAssociatedSubobjects;
D3D12DDI_EXPORT_SUMMARY_FLAGS Flags;
} D3D12DDI_FUNCTION_SUMMARY_NODE_0054;
For each shader export (not function export) in a state object being created, this struct tells the driver which subobjects have been associated with it, and some flags indicating status like unresolved bindings remaining (which is valid for collection state objects).
| Parameter | Definition |
|---|---|
LPCWSTR ExportNameUnmangled |
Unmangled name of the export. |
LPCWSTR ExportNameMangled |
Mangled name of the export. |
UINT NumAssociatedSubobjects |
Number of subobjects associated with the export. Size of ppAssociatedSubobjects array. |
_In_reads_(NumAssociatedSubobjects) const D3D12DDI_STATE_SUBOBJECT_0054*const* ppAssociatedSubobjects |
Array of pointers to subobjects, D3D12DDI_STATE_SUBOBJECT_0054, that are associated with the current export. |
D3D12DDI_EXPORT_SUMMARY_FLAGS Flags |
Status of the current export. See D3D12_EXPORT_SUMMARY_FLAGS. |
D3D12_EXPORT_SUMMARY_FLAGS
typedef enum D3D12DDI_SHADER_EXPORT_SUMMARY_FLAGS
{
D3D12DDI_SHADER_EXPORT_SUMMARY_FLAG_NONE = 0,
D3D12DDI_SHADER_EXPORT_SUMMARY_FLAG_UNRESOLVED_RESOURCE_BINDINGS = 0x1,
D3D12DDI_SHADER_EXPORT_SUMMARY_FLAG_UNRESOLVED_FUNCTIONS = 0x2,
D3D12DDI_EXPORT_SUMMARY_FLAG_UNRESOLVED_ASSOCIATIONS = 0x4,
} D3D12DDI_SHADER_EXPORT_SUMMARY_FLAGS;
Flags indicating properties the runtime has determined about a given shader export (including the graph of functions it may call). Unresolved resource bindings or unresolved functions can only appear for collection state objects, since for executable state objects (e.g. RTPSOs), the runtime ensures all dependencies are resolved.
Regardless of flags settings, it remains possible for the driver to find code incompatibility while linking code across DXIL libraries that the runtime missed, since the runtime isn’t doing full linking. This is likely to be rare. For instance, a shader in one DXIL library might call a function where a parameter is a user defined type that has been defined locally. The function being called may appear in a different DXIL library with the same function signature but having the user defined type defined differently there. Without doing full linking, the runtime will miss this, in which case the driver would have to fail state object creation.
State object lifetimes as seen by driver
Collection lifetimes
Consider a state object (call it S) that references another state object such as an existing ]collection (call it E).
In the runtime, S holds a reference on E so that even if the app destroys E, the driver won’t see E destroyed until S gets destroyed. This also means the DDI structures describing E when it was originally created stay alive as long as E is kept alive. So in the driver both E and S can freely keep references into the data structures describing the contents of E without having to copy them.
AddToStateObject parent lifetimes
Consider a state object (call it C) that is a child of a parent state object (call it P), as a result of incremental addition via AddToStateObject().
In the runtime, C holds a reference on P’s creation description DDI structures only. So in the driver both C and P can freely keep references to the data structures describing the contents of P without having to copy them.
However, in the runtime C does not hold a reference on the DDI object/handle for P. So if the app destroys P, the driver is told to destroy P, even if C is still alive. This means if the driver needs to keep any driver internal data related to P alive because C depends on it, it needs to do the appropriate reference tracking manually. By letting the driver see the destroy of P even while its descendent C is alive, the driver has a chance to destroy any dependency-free data it might have related to P.
In a typical AddToStateObject() scenario, and app might be making regular additions while discarding the (smaller) parents that are no longer needed. The driver gets to observe that this is happening while still being able to rely on DDI data structures for all the parts of the incrementally grown state object staying alive.
Reporting raytracing support from the driver
D3D12DDI_RAYTRACING_TIER
typedef enum D3D12DDI_RAYTRACING_TIER
{
D3D12DDI_RAYTRACING_TIER_NOT_SUPPORTED = 0,
D3D12DDI_RAYTRACING_TIER_1_0 = 10,
} D3D12DDI_RAYTRACING_TIER;
Level of raytracing support. Currently all or nothing.
This is the RaytracingTier member of
D3D12DDI_D3D12_OPTIONS_DATA_0054.
Change log
| Version | Date | Change log |
|---|---|---|
| v0.01 | 9/27/2017 | Initial draft. |
| v0.02 | 10/20/2017 | <li>Changed shader record alignment to 16 bytes</li><li>Changed argument alignment within shader records: each argument must be aligned to its size</li><li>Better naming for various parameters that contribute to shader indexing.</li><li>Ray recursion overflow or callable shader stack overflow now result in a to-be-defined exception mechanism being invoked (likely involving device removal).</li><li>Initial assumption was that wave intrinsics should be disallowed in raytracing shaders (preservingray scheduling independence). Switched to allowing them with the intent that PIX and careful apps can use them. The HLSL compiler may need to warn about how fragile this can be if misused in raytracing shaders.</li><li>Loosened the acceleration structure visualization mode for tools (PIX) to allow for tolerances and variation allowed within acceleration structure builds (to be fleshed out further elsewhere later).</li><li>Changed raytracing acceleration structure alignment from 16 to 256 bytes.</li><li>Clarified that raytracing shaders that can input ray payloads must declare their layout, even if they aren’t looking at it.</li><li>Fleshed out discussion of acceleration structure determinism</li><li>Fleshed out raytracing API method documentation (state objects still to be done)</li><li>Added some detail to ray-triangle intersection specification (still more to be done)</li><li>Added some details to callable shader description</li><li>Added shader cycle counter spec to tools section, ported from the spec that is in D3D11 for shader model 5. What’s missing is a way to correlate shader cycle counts to wall clock time.</li> |
| v0.03 | 11/02/2017 | <li>Specified that wave intrinsics have scope of validity bounded by thread repacking points in the shader (as well as start/end). Thread repacking points: CallShader(), TraceRay(), ReportIntersection().</li><li>Renames of some of the pieces in the state object API to be more consistent with DXIL library concepts.</li><li>Added a MissShaderIndex parameter to TraceRay(). So now the selection of miss shaders out of the miss shader table is no longer coupled to how the hit group is selected.</li><li>Added RAY_FLAG_SKIP_CLOSEST_HIT_SHADER. Also added an example in the ray flags section of the overall walkthrough, showing the usefulness of ray flags in general, including this new flag. Also documented each ray flag.</li><li>Added an instance culling section in the walkthrough (the feature was already present), highlighting the usefulness.</li><li>In the callable shaders discussion in the walkthrough, clarified that callable shaders are expected to be implemented by scheduling them for separate execution as opposed to being inlined. Discussed of how callable shaders are really no different than a special case of running a miss shader, minus any geometry interaction. So given an implementation has to support miss shaders, supporting callable shaders is in some ways a subset. And this should scope app expectations about how they behave accordingly.</li><li>Added a Watertightness requirement to the ray-triangle intersection spec (which is still a work in progress overall). Snippet: It is expected that implementations of watertight ray triangle intersections, including following a form of top-left rule to remove double hits on edges, are possible without having to resort to costly paths such as double precision fallbacks. A proposal is in the works and will appear in this spec.</li><li>Added D3D12_RESOURCE_STATE_SHADER_TABLE</li><li>Added bit size limits for the parameters to TraceRay that contribute to shader table indexing.</li><li>Added section describing potential future features, such as: traversal shaders, more efficient acceleration structure builds, beam tracing, ExecuteIndirect() improvements. This list will grow.</li><li>Clarified that if the raytracing process encounters a null shader identifier, no shader is executed for that purpose and the raytracing process continues.</li> |
| v0.04 | 11/07/2017 | <li>Called out the largest open issue with this spec as it stands now (mention of which was missing before). In short it has been observed that the current design may not be the best fit for a lot of current and near-future hardware given the way it steers towards ubershaders. While this isn’t a unanimous opinion, it must be considered. This note appears both in the Open Issues section and repeated in the Design Goals section at the front – look there for more detail.</li><li>Stopped allowing GeometryContributionToHitGroupIndex to change in bottom-level acceleration structure updates.</li><li>Removed RayRecursionLevel() given the overhead it might cause for implementations to be able to report it. If apps need it they can track it manually in ray payload.</li><li>Stated there isn’t a limit on the user declared callable shader stack size. The question still remains of what the failure mode should be if too big a stack causes out of memory.</li><li>Clarified that acceleration structure serialization/deserialization (intended for PIX) isn’t meant for caching acceleration structures. It is likely that doing a full build of an acceleration structure will be faster than loading it from disk.</li><li>Also stated that deserialize and visualize modes for acceleration structure copies are only allowed when the OS is in Developer Mode.</li><li>Minor cleanup of acceleration structure update flag behaviors: If an acceleration structure is built with ALLOW_UPDATE and then PERFORM_UPDATE is done, the result still allows update. ALLOW_UPDATE cannot be specified with PERFORM_UPDATE – further updates are implied to be allowed for the result of an update.</li><li>For acceleration structure builds, added a D3D12_ELEMENTS_LAYOUT parameter describing how instances/geometries are laid out. There are two options: D3D12_ELEMENTS_LAYOUT_ARRAY and D3D12_ELEMENTS_LAYOUT_ARRAY_OF_POINTERS. This is similar to the flexibility on the array of rendertargets in OMSetRenderTargets in graphics.</li><li>For wave intrinsics in raytracing shaders added open issue that an explicit AllowWaveRepacking() intrinsic may be required to be paired with intrinsics like TraceRay() if an app wants to use other wave intrinsics in the shader.</li><li>HLSL syntax cleanup and minor renaming, such as:</li><li>Renamed PrimitiveID() to PrimitiveIndex() since it is more like InstanceIndex(), being autogenerated as opposed to being user defined, like InstanceID()</li><li>Started documenting the required resource state for resources in some of the APIs (not finished yet). Also listed which APIs can work on graphics vs compute vs bundle command lists.</li> |
| v0.05 | 11/15/2017 | <li>Clarified that on acceleration structure update, while the transform member of geometry descriptions can change, it can’t change from NULL <-> non-NULL.</li><li>Clarified that for tools visualization of an acceleration structure, the returned geometry may have transforms folded in and may change topology/format of the data (with no loss of precision), so strips might become lists and float16 positions might become float32.</li><li>DispatchRays() can be called from graphics or compute command lists (had listed graphics only)</li><li>Consistent with above, raytracing shaders that use a root signature (instead of, or in addition to a local root signature) get root arguments from the compute root arguments on the command list.</li><li>Clarified in shader table memory initialization section that descriptor handles (identifying descriptor tables) take up 8 bytes.</li><li>For RayTracingAccelerationStructure clarified that the HLSL declaration includes :register(t#) binding assignment syntax (just like any other SRV binding). Also clarified that acceleration structures can be bound as root descriptors as well as via descriptor heap.</li><li>Switched the way descriptor based acceleration structure SRVs are declared. Instead of just being an acceleration structure flag on the buffer view type, switched to having a new view type: D3D12_SRV_DIMENSION_RAYTRACING_ACCELERATION_STRUCTURE. The description for this view type contains a GPUVA, which makes more sense than legacy buffer SRV creation fields: FirstElement, NumElements etc. – these don’t mean anything for acceleration structures.</li> |
| v0.06 | 1/29/2018 | <li>Changed LPCSTR parameters in state objects (for exports names) to LPWSTR to be consistent with DXIL APIs</li><li>Minor enum renames</li><li>Made a few fields D3D12_GPU_VIRTUAL_ADDRESS_RANGE (instead of just _ADDRESS) for APIs that are writing to memory, to help tools and drivers be simpler</li><li>Added a NO_DUPLICATE_ANYHIT_INVOCATION geometry flag (enabling faster acceleration structures if absent)</li><li>Removed GeometryContributionToHitGroupIndex field in D3D12_RAYTRACING_GEOMETRY_DESC in favor of it being a fixed function value: the 0 based index of the geometry in the order the app supplied it into the bottom- level acceleration structure. Having this value be user programmable turned was not hugely valuable, and there was IHV pushback against supporting it until a stronger need came up (or perhaps some better shader table indexing scheme is proposed that can be implemented just as efficiently).</li><li>Added struct defining acceleration structure serialization header</li><li>Removed topology and strip cut value from geometry desc. Just triangle lists now.</li><li>Clarified that during raytracing visualization, geometries may appear in a different order than in the original build, as this order has no bearing on raytracing behavior.</li><li>Specified that intersections shaders are allowed to execute redundantly for a given ray and procedural primitive (redundant, but implementation is free to make that choice). Detailed a bunch of caveats related to this.</li><li>Defined ray recursion limit to be declared by app in the range [0…31].<li><li>GetShaderIdentifierSizeInBytes() returns a nonzero multiple of 8 bytes.</li><li>Added RayFlags() intrinsic, returning current ray flags to all shaders that interact with rays.</li><li>Changed callable shader stack limit declaration to just a shader stack limit that applies to all raytracing shaders except ray generation shaders (since they are the root).</li><li>Minor corrections to shader example code.</li><li>Renamed InstanceCullMask to InstanceInclusionMask (and flipped the sense of the instance masking test). Was: InstanceCullMask & InstanceMask -> cull. Changed to !(InstanceInclusionMask & InstanceMask) -> cull. Feedback was the change made the feature more useful typically, despite the slightly awkward implication that if apps set InstanceMask to 0 in an instance definition it will never get included.</li><li>For the HitGroupTable parameter to DispatchRays, specified: all shader records in the table must contain a valid shader identifier (NULL is valid). In contrast, local root arguments in the shader records need only be initialized if they could be referenced during raytracing (same requirement for any type of shader table).</li><li>Required that GPU descriptor handles are globally unique across all descriptor heaps regardless of type. This makes it much cheaper for tools/debug layer to validate descriptor handles in shader tables, including making sure.</li><li>Before deserializing a serialized top-level acceleration structure the app patches the pointers in the header to where bottom-level acceleration structures will be. Those bottom-level acceleration structures pointed to need not have been deserialized yet (spec previously required it), as long as they are deserialized by the app before raytracing uses the acceleration structure.</li><li>Removed D3D12_RESOURCE_STATE_SHADER_TABLE in favor of simply reusing D3D12_RESOURCE_STATE_NON_PIXEL_SHADER_RESOURCE.</li><li>Required that resources that will contain acceleration structures must be created in the D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE state and must stay in that state forever. Synchronization of read/write operations to acceleration structures is done by UAV barrier. See “Acceleration structure memory restrictions” for more details.</li><li>For all raytracing APIs that input or output to GPU memory, defined for each relevant parameter what resource state it needs to be in. In summary: all acceleration structure accesses (read or write) require ACCELERATION_STRUCTURE state as described above. Any other read only GPU input to a raytracing operation must be in NON_PIXEL_SHADER_RESOURCE state, and destination for writes (such as post build info or serialized acceleration structures) must be in UNORDERED_ACCESS.</li><li>Added D3D12_ROOT_SIGNATURE_FLAG_LOCAL_ROOT_SIGNATURE so that apps can distinguish whether a root signature is meant for graphics/compute vs being a local root signature. This distinction between the two types of root signatures is useful for drivers since their implementation of each layout could be different. Also, local root signatures don’t have limits on the number of root parameters that root signatures do.</li><li>Related to adding the local root signature flag above, removed the D3D12_SHADER_VISIBILITY_RAYTRACING option for root parameter visibility. In a root signature (as opposed to local root signature), the root arguments are shared with compute, which just uses D3D12_SHADER_VISIBILITY_ALL.</li><li>Clarified in the D3D12_RAYTRACING_INSTANCE_FLAG_TRIANGLE_FRONT_COUNTERCLOCKWISE description that winding order applies in object space. So instance transforms with a negative determinant (e.g. mirroring an instance) don’t change the winding within the instance. Per-geometry transforms, by contrast, are combined with geometry in object space, so negative determinant transforms do flip winding in that case.</li><li>In the DDI section, added discussion of a shader export summary that the runtime will generate for drivers, indicating for each shader export in a collection or RTPSO which subobjects have been associated with it. In the case of a collection it also indicates if the export has any unresolved bindings or functions. With all this information, a driver can quickly decide if it should even bother trying to compile the shader yet. There are more details than summarized here.</li><li>Specified that collections can’t be made from existing collections (for simplicity). Only executable state objects (e.g. RTPSOs) can be constructed using existing collections as part of their definition.</li> |
| v0.07 | 2/1/2018 | <li>Renames to go with marketing branding: “DirectX Raytracing”:<ul><li>RAY_TRACING -> RAYTRACING,</li><li>RayTracing -> Raytracing,</li><li>ray tracing -> raytracing etc.</li><li>Getting rid of the space is meant to at least reduce the likelihood of people concatenating the name to RT, a confusingly overloaded acronym (runtime, WindowsRT etc.).</li></ul></li><li>Renamed various shader intrinsics for clarity:<ul><li>TerminateRay() -> AcceptHitAndEndSearch(),</li><li>IgnoreIntersection() -> IgnoreHit(),</li><li>ReportIntersection() -> ReportHit(),<li><li>RAY_FLAG_TERMINATE_ON_FIRST_HIT -> RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH</li></ul></li><li>Added “Subobject association behavior” section discussing details about the subobject association feature in state objects. Lots of detail into default associations, explicit associations, overriding associations, what scopes are affected etc. This might need more refinement or clarification in the future but should be a good start.</li><li>The destination resource state for acceleration structure serialize is UNORDERED_ACCESS (spec had mistakenly stated NON_PIXEL_SHADER_RESOURCE</li><li>Defined that the order of serializing top-level and/or bottom-level acceleration structures doesn’t matter (and the dependencies don’t have to still be present/intact in memory). Same for deserializing.</li><li>Got rid of “TBD: GeometryIndex()” HLSL intrinsic, as this value is not available to shaders. GeometryContributionToHitGroupIndex is only used in shader table indexing, and if apps want the value in the shader, they need to put a constant in their root signature manually.</li><li>Removed stale comment indicating there’s 4 bytes padding between geometry descs in raytracing visualization output to allow natural alignment when viewed on CPU. That padding became unnecessary as of spec v0.06 when the GeometryContributionToHitGroupIndex was removed from geometry desc struct.</li> |
| v0.08 | 2/6/2018 | <li>Series of wording cleanups and clarifications throughout spec</li><li>Clarified that observable duplication of primitives is what is not allowed in acceleration structures. Observable as in something that becomes visible during raytracing operations beyond just performance differences. Listed exceptions where duplication can happen: intersection shader invocation counts, and when the app has not set the NO_DUPLICATE_ANYHIT_INVOCATION flag on a given geometry</li><li>Changed the behavior of pipeline stack configuration. Moved it out of the raytracing pipeline config subobject (which was a part of the pipeline state) to being mutable on a pipeline state via GetPipelineStackSize()/SetPipelineStackSize(). Added detailed discussion on the default stack size calculation (which is conservative and likely wasteful) as well as how apps can optionally choose to set it with a more optimal value based on knowing their specific calling pattern.</li><li>Clarified that shader identifiers globally identify shaders, so that even if it appears in a different state object (with the same associations like any root signatures) it will have the same identifier.</li><li>In addition to being in acceleration_structure state, resources that will hold acceleration structures must also have resource flag allow_unordered_access. This merely acknowledges that it is UAV barriers that are used for read/write synchronization. And that behind the scenes, implementations will be doing UAV style accesses to build acceleration structures (despite the API resource state being always “acceleration structure”</li> |
| v0.09 | 3/12/2018 | <li>For a (tools) acceleration structure visualization, geometries must appear in the same order as in build (given that hit group table indexing is influenced by the order of each geometry in the acceleration structure, so the order needs to be preserved for visualization).</li><li>Vertex format DXGI_FORMAT_R16G16B16_FLOAT doesn’t actually exist. Specified that DXGI_FORMAT_R16G16B16A16_FLOAT can be specified, and the A16 component gets ignored. Other data can be packed over the A16 part, such as setting the vertex stride to 6 bytes for instance.</li><li>For GetShaderStackSize(), required that to get the stack size for a shader within a hit group, the following syntax is used for the entrypoint string name: hitGroupName::shaderType, where hitGroupName is the name of the hit group export and shaderType is one of: intersection, closesthit, anyhit (all case sensitive). E.g. “myLeafHitGroup::anyhit”. Stack size is specific to individual shaders, but the overall hit group a shader belongs to can influence the stack size as well.</li><li>Guaranteed that shader identifier size (returned by GetShaderIdentifierSize() can be no larger than 64 bytes.</li><li>The Raytracing Emulation section has been updated with more concrete details on the Fallback Layer. It will be a stand-alone library that will be open-sourced publically that will closely mirror the DXR API. Developers will be free to pull the repro and tailor it for their own needs, or even send pull-requests with contributions.</li><li>Removed row_major modifier on matrix intrinsics definition (irrelevant).</li><li>Removed system value semantics, added language to clarify parameter requirements.</li><li>Added state object flags: D3D12_STATE_OBJECT_FLAG_ALLOW_EXTERNAL_DEPENDENCIES_ON_LOCAL_DEFINITIONS and D3D12_STATE_OBJECT_FLAG_ALLOW_LOCAL_DEPENDENCIES_ON_EXTERNAL_DEFINITIONS. Both of these apply to collection state objects only. In the absence of the first flag (default), drivers are not forced to keep uncompiled code around just because of the possibility that some other entity in a containing collection might call a function in the collection. In the absence of the second flag (default), contents of collections must be fully resolved locally (including necessary subobject associations) such that advanced implementations can fully compile code in the collection (not having to wait until RTPSO creation). These flags will be added to the OS post-March 2018/GDC, and in the meantime the default behavior (absence of the flags) is the only available current behavior.</li><li>Added discussion: Subobject associations for hit groups. Explains that subobject associations can be made to the component shaders in a hit group and/or to the hit group directly. Basically it is invalid if there are any conflicts – see the text for full detail.</li> |
| v0.91 | 7/27/2018 | <li>Cleared out references to experimental/prototype API and open issues</li><li>Local root signatures don’t have the size constraint that global root signatures do (since local root signatures just live in shader tables in app memory).</li><li>All local root signatures referenced in an RTPSO that define static samplers must have matching definitions for any given s# that they define, and the total number of s# defined across global and local root signatures must fit within bind model limit.</li><li>Shader table start address must be 64 byte aligned</li><li>Shader record stride must be a multiple of 32 bytes</li><li>Noted that subobjects defined in DXIL did not make this first release.</li><li>Added table (Subobject association requirements) describing rules for each subobject type.</li><li>Drivers are responsible for implementing caching of state objects using existing services in D3D12.</li><li>Added discussions of “Inactive primitives and instances” as well as “Degenerate primitives and instances”</li><li>Fleshed out “Fixed function ray-triangle intersection specification” with a hypothetical top-left rule description. Implementations must do something like it to ensure no double hits or holes along shared edges.</li><li>Exceeding ray recursion limit or overflowing pipeline stack result in device removed.</li><li>Refined “Default pipeline stack size” calculation</li><li>Added “Determining raytracing support”</li><li>Cut “Shader Cycle Counter” feature, could bring it back in a future release.</li><li>Series of minor tweaks to API/DDI definitions to get to final release state, including fleshing out documentation for individual APIs/structs/enums.</li><li>Fleshed out descriptions of D3D12_STATE_OBJECT_FLAG_ALLOW_LOCAL_DEPENDENCIES_ON_EXTERNAL_DEFINITIONS and D3D12_STATE_OBJECT_FLAG_ALLOW_EXTERNAL_DEPENDENCIES_ON_LOCAL_DEFINITIONS. The absence of these flags in a state object configuration (which is the default) means drivers can compile code in collections without waiting until RTPSO create (aside from final linking on a clean implementation), and conversely don’t have to keep extra stuff around in each collection on the chance that other parts of an RTPSO will depend on whats inside a given collection. Apps can opt in to cross-linkage basically.</li><li>D3D12_NODE_MASK state object definition was missing.</li><li>Added D3D12_HIT_GROUP_TYPE member to hit groups.</li><li>Removed GetShaderIdentifierSizeInBytes(). Shader identifers are now a fixed 32 bytes.</li><li>Refactored GetRaytracingAccelerationStructurePrebuildInfo() and BuildRaytracingAccelerationStructure() APIs to share the same input struct as a convenience. The latter API just has additional parameters to specify (such as actual buffer pointers).</li><li>Added the functionality of GetAccelerationStructurePostbuildInfo() as optional output parameters to BuildRaytracingAccelerationStructure(). So an app can request post build info directly as an additional output of a build (without extra barrier calls between doing the build and getting postbuild info), or it can still separately get postbuild info for an already built acceleration structure.</li><li>BUILD_FLAG_ALLOW_UPDATE can only be specified on an original build or an update where the source acceleration structure also specified ALLOW_UPDATE. Similarly, BUILD_FLAG_ALLOW_COMPACTION can only be specified on an initial acceleration structure build or on an update where the input acceleration structure also specified ALLOW_COMPACTION.</li><li>Renamed “D3D12_GPU_VIRTUAL_ADDRESS Transform” parameter to D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC to Transform3x4 to be more clear about the matrix layout. Similarly renamed “FLOAT Transform[12]” member of D3D12_RAYTRACING_INSTANCE_DESC to “FLOAT Transform[3][4]”</li><li>Added support for 16 bit SNORM vertex formats for acceleration structure build input.</li><li>Added buffer alignment (and or stride) requirements to various places in API where buffer locations are provided.</li><li>Added option to query the current size of an already built acceleration structure “POSTBUILD_INFO_CURRENT_SIZE”. Useful for tools inspecting arbitrary acceleration structures.</li><li>Added D3D12_SERIALIZED_DATA_DRIVERS_MATCHING_IDENTIFIER to serialized acceleration structure headers. This is opaque versioning information the driver generates that allow an app to serialize acceleration structures to disk and later restore. On restore, the identifier can be compared with what the current device reports via new CheckDriverMatchingIdentifier() API to see if a serialized acceleration structure is compatible with the current device (and can be deserialized).</li><li>Added SetPipelineState1() command list API for setting RTPSOs (factored out of the parameters to DispatchRays(). Calling SetPipelineState1() unsets any pipeline state set by SetPipelineState() (graphics or compute). And vice versa.</li><li>Made the grid dimensions in DispatchRays 3D to be consistent with compute Dispatch(). Similarly in HLSL, DispatchRaysIndex() returns uint3 and DispatchRaysDimensions() returns uint3.</li><li>Clarified when it is valid to call GetShaderIdentifier() to get the identifier for a given export from a state object.</li><li>Replaced float3x4 ObjectToWorld() and WorldToObject() intrinsics with ObjectToWorld3x4(), ObjectToWorld4x3(), WorldToObject3x4() and WorldToObject4x3(). The 3x4 and 4x3 variants just let apps pick whichever transpose of the matrix they want to use.</li><li>Documented the various DDIs that are not just trivial passthroughs of APIs. Most interesting of which is D3D12DDI_FUNCTION_SUMMARY_0054, a DDI only subobject in state object creation that the runtime generates, listing for each export what subobject got associated to it among other things. This way drivers don’t need to understand the various rules for how subobject associations (with defaults) work.</li> |
| v1.0 | 10/1/2018 | <li>Clarified that ray direction does not get normalized.</li><li>Clarified that tracing rays with a NULL acceleration structure causes a miss shader to run.</li><li>Set maximum shader record stride to 4096 bytes.</li><li>Reduced maximum local root signature size from unlimited to max-stride (4096) – shader identifier size (32) = 4064 bytes max.</li><li>Corrected stale reference to DispatchRays() taking a state object as input -> corrected to SetPipelineState1 as the API where state objects are set.</li><li>The grid dimensions passed to DispatchRays() must satisfy widthheightdepth <= 2^30. Exceeding this produces undefined behavior.</li><li>Removed stale mention that collections can be nested (they cannot at least for now).</li><li>Added geometry limits section: Max geos in a BLAS: 2^24, Max prims in BLAS across geos: 2^29, max instance count in TLAS 2^24.</li><li>Added Ray extents section: TMin must be nonnegative and <= TMax. +Inf is ok for either (really only makes sense for TMax). Ray-trinagle intersection can only occur if the intersection T-value satisfies TMin < T < TMax. No part of ray origin/direction/T range can be NaN.</li><li>Added General tips for building acceleration structures section</li><li>Added Choosing acceleration structure build flags section</li><li>Added preamble to Raytracing emulation section pointing out that the fallback is no longer being maintained given the cost/benefit is not justified etc.</li><li>Various minor typos fixed</li><li>Fleshed out details of ALLOW_COMPACTION, including that specifying the flag may increase acceleration structure size.</li><li>Also for postbuild info, clarified some guarantees about CompactedSizeInBytes, such as compacted acceleration structures don’t use more space than non compacted ones. And there isn’t a guarantee that an acceleration structure with fewer items than another one will compact to a smaller size if both are compacted (the property does hold if they are not compacted).</li><li>Per customer request, clarified for D3D12_RAYTRACING_INSTANCE_DESC that implementations transform rays as opposed to transforming all geometry/AABBs.</li><li>Only defined ray flags are propagated by the system, e.g. visible to the RayFlags() shader intrinsic.</li><li>Clarified that the scope of shared edges where watertight ray triangle intersection applies only within a given bottom level acceleration structure for geometries that share the same transform.</li> |
| v1.01 | 11/27/2018 | <li>Clarified that determination of inactive/degenerate primitives includes all geometry transforms. For instance, per-geometry bottom level transforms are one way that NaNs can be injected to cheaply cause groups of geometry to be deactivated in builds.</li><li>Some clarifications in “Conflicting subobject associations” section regarding DXIL defined subobjects (a feature for a future release).</li><li>Clarified that mixing of geometry types within a bottom-level acceleration structure is not supported.</li> |
| v1.02 | 3/4/2019 | Added a comment on ways of calculating a hit position and their tradeoffs to Closest Hit Shader section. |
| v1.03 | 3/25/2019 | <li>Ported DXR spec to Markdown.</li><li>Removed wording that DXIL subobjects aren’t in initial release, as they have now been implemented as of 19H1.</li> |
| v1.04 | 4/18/2019 | <li>Support for indirect DispatchRays() calls (ray generation shader invocation) via ExecuteIndirect().</li><li>Support for incremental additions to existing state objects via AddToStateObject().</li><li>Support for inline raytracing via TraceRayInline().</li><li>Added D3D12_RAYTRACING_TIER_2, which requires the above features.</li> |
| v1.05 | 5/15/2019 | <li>Renamed InlineRayQuery to simply RayQuery in support of adding this object as a return value for TraceRay() (in addition to TraceRayInline()). For TraceRay(), the returned RayQuery object represents the final state of ray traversal after any shader invocations have completed. The caller can retrieve information about the final state of traversal (CLOSEST_HIT or MISS) and relevant metadata such as hit attributes, object ids etc. that the system already knows about without having to manually store this information in the ray payload.</li><li>Added stipulations on the state object definition passed into the AddToStateObject() API based around the incremental addition being a valid self contained definition of a state object, even though it is being combined with an existing one. The list of stipulations are intended to simplify driver compiler burden, runtime validation burden, as well as simplify code linkage/dependency semantics.<li>Added D3D12_STATE_OBJECT_FLAG_ALLOW_STATE_OBJECT_ADDITIONS flag so that executable state objects (e.g. raytracing pipelines) must opt-in to being used with AddToStateObject(). The flags discussion includes a description of what it means for collection state objects to set this flag.</li><li>Renamed D3D12_RAYTRACING_TIER_2_0 to D3D12_RAYTRACING_TIER_1_1 to slightly better convey the relative significance of the new features to the set of functionality in TIER_1_0.</li><li>Removed RAY_QUERY_STATE_UNINITIALIZED from RAY_QUERY_STATE in favor of simply defining that accessing an uninitialized RayQuery object produces undefined behavior, and the HLSL compiler will attemp to disalllow it.</li> |
| v1.06 | 5/16/2019 | <li>Removed a feature proposed in previous spec update: ability for TraceRay() to return a RayQuery object. For some implementations this would actually be slower than the application manually stuffing only needed values into the ray payload, and would require extra compilation for paths that need the ray query versus those that do not. This feature could come back in a more refined form in the future. This could be allowing the user to declare entries in the ray payload as system generated values for all query data (e.g. SV_CurrentT). Some implementations could choose to compile shaders to automatically store these values in the ray payload (as declared), whereas other implementations would be free to retrieve these system values from elsewhere if they are readily available (avoiding payload bloat).</li> |
| v1.07 | 6/5/2019 | <li>For Tier 1.1, GeometryIndex() intrinsic added to relevant raytracing shaders, for applications that wish to distinguish geometries manually in shaders in adddition to or instead of by burning shader table slots.</li><li>Revised AddToStateObject() API such that it returns a new ID3D12StateObject interface. This makes it explicitly in the apps control when to release the original state object (if ever). Clarified lots of others detail about the semantics of the operation, particularly now that an app can produce potentially a family of related state objects (though a straight line of inheritance may be the most likely in practice).</li><li>Refactored inline raytracing state machine. Gave up up original proposal’s conceptual simplicity (matching the shader based model closely) in favor of a model that’s functionally equivalent but makes it easier for drivers to generate inline code. The shader has a slightly higher burden having to do a few more things manually (outside the system’s tracking). The biggest win should be that there is one logical place where the bulk of system implemented traversal work needs to happen: RayQuery::Proceed(), a method which the shader will typically use in a loop condition until traversal is done. Some helpful links:<ul><li>Inline raytracing overview</li><li>TraceRayInline control flow</li><li>RayQuery object<li>RayQuery intrinsics</li><li>TraceRayInline examples</li></ul> |
| v1.08 | 7/17/2019 | <li>Removed distinction between inline ray flags and ray flags. Both dynamic ray flags for RayQuery::TraceRayInline() and TraceRay() as well as the template parameter for RayQuery objects share the same set of flags.</li><li>Added ray flags: RAY_FLAG_SKIP_TRIANGLES and RAY_FLAG_SKIP_PROCEDURAL_PRIMITIVES to allow completely skipping either class of primitives. These flags are valid everywhere ray flags can be used, as summarized above.</li><li>Allowed RayQuery::CommitProceduralPrimitiveHit() and RayQuery::CommitNonOpaqueTriangleHit() to be called zero or more times per candidate (spec was 0 or 1 times). If CommitProceduralPrimitiveHit(t) is called multiple times per candidate, it requires the shader to have ensure that each time the new t being committed is closest so far in ray extents (would be the new TMax). If CommitNonOpaqueTriangleHit() is called multiple times per candidate, subsequent calls have no effect, as the hit has already been committed.</li><li>RayQuery::CandidatePrimitiveIndex() was incorrectly listed as not supported for HIT_CANDIDATE_PROCEDURAL_PRIMITIVE in the RayQuery intrinsics tables.</li><li>New version of raytracing pipeline config subobject, D3D12_RAYTRACING_PIPELINE_CONFIG1, adding a flags field, D3D12_RAYTRACING_PIPELINE_FLAGS. The HLSL equivalent subobject is RaytracingPipelineConfig1. The available flags, D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_TRIANGLES and D3D12_RAYTRACING_PIPELINE_FLAG_SKIP_PROCEDURAL_PRIMITIVES (minus D3D12_ when defined in HLSL) behave like OR’ing the above equivalent RAY_FLAGS listed above into any TraceRay() call in a raytracing pipeline. Implementations may be able to make some pipeline optimizations knowing that one of the primitive types can be skipped.</li><li>Cut RayQuery::Clone() instrinsic, as it doesn’t appear to have any useful scenario.</li><li>Ray extents section has been updated to define a different range test for triangles versus procedural primitives. For triangles, intersections occur in the (TMin…TMax) (exclusive) range, which is no change in behavior. For procedural primitives, the spec wasn’t explicit on what the behavior should be, and now the chosen behavior is that intersections occur in [TMin…TMax] (inclusive) range. This allows apps the choice about how to handle exactly overlapping hits if they want a particular one to be reported.</li> |
| v1.09 | 11/4/2019 | <li>Added Execution and memory ordering discussion defining that TraceRay() and/or CallShader() invocations finish execution when the caller resumes, and that for UAV writes to be visible memory barriers must be used..</li><li>Added State object lifetimes as seen by driver section to clarify how driver sees the lifetimes of collection state objects as well as state objects in a chain of AddToStateObject() calls growing a state object while the app is also destroying older versions.</li><li>In BuildRaytracingAccelerationStructure() API, tightened the spec for the optional output postbuild info that the caller can request. The caller can pass an array of postbuild info descriptions that they want the driver to fill out. The change is to require that any given postbuild info type can only be requested at most once in the array.</li> |
| v1.1 | 11/7/2019 | <li>Added accessor functions RayQuery::CandidateInstanceContributionToHitGroupIndex and RayQuery::CommittedInstanceContributionToHitGroupIndex so that inline raytracing can see the InstanceContributionToHitGroupIndex field in instance data. This is done in the spirit of letting inline raytracing see everything that is in an acceleration structure. Of course in inline raytracing there are no shader tables, so there is no functional behavior from this value. Instead it allows the app to use this value as arbitrary user data. Or when sharing acceleration structures between dynamic-shader-based raytracing, to manually implementing in the inline raytracing case the effective result of the shader table indexing in the dynamic-shader-based raytracing case.</li><li>In Wave Intrinsics section, clarified that use of RayQuery objects for inline raytracing does not count as a repacking point.</li> |
| v1.11 | 3/3/2020 | <li>For Tier 1.1, additional vertex formats supported for acceleration structure build input as part of D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC.</li><li>Cleaned up spec wording - D3D12_RAYTRACING_PIPELINE_CONFIG and D3D12_RAYTRACING_SHADER_CONFIG have the same rules: If multiple shader configurations are present (such as one in each collection to enable independent driver compilation for each one) they must all match when combined into a raytracing pipeline.</li><li>For collections, spelled out the list of conditions that must be met for a shader to be able to do compilation (as opposed to having to defer it).</li><li>Clarified that ray recursion limit doesn’t include callable shaders.</li><li>Clarified that in D3D12_RAYTRACING_SHADER_CONFIG, the MaxPayloadSizeInBytes field doesn’t include callable shader payloads. It’s only for ray payloads.</li> |
| v1.12 | 4/6/2020 | <li>For D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS, clarified that the result is self contained in the destination buffer.</li> |
| v1.13 | 7/6/2020 | <li>For D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC, clarified that if an index buffer is present, this must be at least the maximum index value in the index buffer + 1.</li><li>Clarified that a null hit group counts as opaque geometry.</li> |
| v1.14 | 1/12/2021 | <li>Clarified that RayFlags() does not reveal any flags that may have been added externally via D3D12_RAYTRACING_PIPELINE_CONFIG1.</li> |
| v1.15 | 3/26/2021 | <li>Added payload access qualifiers section, introducing a way to annotate members of ray payloads to indicate which shader stages read and/or write individual members of the payload. This lets implementations optimize data flow in ray traversal. It is opt-in for apps starting with shader model 6.6, and if present in shaders appears as metadata that is ignored by existing drivers. For shader model 6.7 and higher these payload access qualifiers are required to be used by default (opt-out).</li> |
| v1.16 | 7/29/2021 | <li>For any hit shaders, clarified that for a given ray, the system can’t execute multiple any hit shaders at the same time. As such shaders can modify the ray payload freely without worrying about conflicting with other shader invocations.</li> |
| v1.17 | 10/25/2021 | <li>In Degenerate primitives and instances, added the clarification: An exception to the rule that degenerates cannot be discarded with ALLOW_UPDATE specified is primitives that have repeated index value can always be discarded (even with ALLOW_UPDATE specified). There is no value in keeping them since index values cannot be changed.</li> |
| v1.18 | 3/31/2022 | <li>In Inactive primitives and instances, changed handling of NaN in triangles to: Triangles are considered “inactive” (but legal input to acceleration structure build) if the x component of any vertex is NaN. The “any” used to be “each”. This reduces the amount of undefined behavior apps are exposed to.</li> |
| v1.19 | 8/10/2022 | <li>For GetShaderIdentifier clarified that the returned pointer is valid as long as the state object is valid (used to only say the data pointed to is valid).</li><li>Removed inaccurate statements that various acceleration structure copy modes require the OS to be in developer mode. Such enforcement was initially considered but not implemented.</li> |
| v1.20 | 1/11/2023 | <li>In HLSL Subobject definitions sections, corrected all the examples to show the syntax actually supported by the compiler. Previously showed an alternative syntax that didn’t end up being used.</li> |
| v1.21 | 7/20/2023 | <li>Merged features proposals for Opacity Micromaps and Shader Execution Reordering. These featues still need refinement, but the plan is to ship them. Specific timeline unknown, and each may ship independently. In the meantime progress aligning the features can resume.</li> |
| v1.22 | 8/4/2023 | <li>To enable shaders to get triangle object positions, added TriangleObjectPosition(), RayQuery::CandidateTriangleObjectPosition(), RayQuery::CommittedTriangleObjectPosition() and RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS build flag. These will be supported with a TBD new D3D12_RAYTRACING_TIER or shader model.</li> |
| v1.23 | 10/31/2023 | <li>Large update to Shader Execution Reordering, including many refinements and a large reduction in the scope of MakeHit:</li><ul><li>Added the concept of NOP-HitObjects, including updates to default-construction of HitObjects and various getters.</li><li>Made all HitObject getters well-defined regardless of whether the HitObject encodes a hit, miss, or nop.</li><li>Added a more explicit definition of reorder points and how they relate to existing and new APIs.</li><li>Updated the sections on Execution and memory reordering and Reorder points - memory coherence and visibility, including more crisp memory barrier requirements for passing data across caller/callee through UAVs and across reorder points.</li><li>Replaced ReorderThread example 2 with a longer version and added ReorderThread example 3</li><li>Restricted HitObject::MakeHit to creation from RayQuery.</li><li>Specified that a HitObject has no shader table index if created from RayQuery.</li><li>Added HitObject::SetShaderTableIndex, to assign a shader table index after the fact.</li><li>Added Separation of ReorderThread and HitObject::Invoke section discussing the benefits of having separate calls.</li></ul> |
| v1.24 | 05/30/2024 | <li>TriangleObjectPosition(uint VertexIndex), RayQuery::CandidateTriangleObjectPosition(uint VertexIndex), RayQuery::CommittedTriangleObjectPosition(uint VertexIndex): Add uint VertexIndex parameter and change return to individual vertex position.</li><li>Raytracing pipeline flags: Add RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS, corresponding to the D3D API equivalent, usable in the Raytracing pipeline config1 subobject.</li><li>TraceRay, RayQuery TraceRayInline: Clarify that presence of unknown RayFlags results in undefined behavior.</li><li>In GetShaderIdentifier removed the sentence: "The data itself globally identifies the shader, so even if the shader appears in a different state object (with same associations like any root signatures) it will have the same identifier.". This contradicted the text in Shader identifier that allows for duplicate shaders to have the same or different identifier depending on implementation.</li> |
| v1.25 | 11/8/2024 | <li>For Opacity Micromaps, merged separate APIs for building/copying OMMs into the equivalent existing APIs for managing acceleration structures.</li><li>A summary of the resulting delta from the base DXR spec is here: Opacity Micromap related API and HLSL impacts</li><li>Required OMM arrays to be in buffers of state D3D12_RESOURCE_STATE_RAYTRACING_ACCELERATION_STRUCTURE just like other acceleration structures (they can be intermixed in the same buffers).</li><li>Clarified the resource states required for inputs and outputs to OMM array build, consistent with how acceleration structures already behave.</li><li>Added a template parameter to RayQuery, RayQuery flags, where RAYQUERY_FLAG_ALLOW_OPACITY_MICROMAPS can be specified for inline raytracing rayquery objects, equivalent to the raytracing pipeline flag RAYTRACING_PIPELINE_FLAG_ALLOW_OPACITY_MICROMAPS for opting in to OMMs with non-inline raytracing.</li><li>In Opacity micromaps and TraceRayInline cleaned up incorrect text copy paste from TraceRay, so that the description is now relevant to the inline case.</li><li>In D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC, changed D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC Triangles member to const D3D12_RAYTRACING_GEOMETRY_TRIANGLES_DESC* pTriangles, similar for pOMMLinkage. The reason these are pointers is to keep the size of D3D12_RAYTRACING_GEOMETRY_OMM_TRIANGLES_DESC from exceeding the other pre-existing structs in the union within D3D12_RAYTRACING_GEOMETRY_DESC. This allowed adding the Opacity Micromaps feature without having to make an API breaking change to version the container structs and corresponding APIs.</li><li>ChangedD3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_BYTE_ALIGNMENT from 256 to 128 bytes. Same for D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC.InputBuffer, from 256 to 128 byte alignment.</li><li>For D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS, for OMM arrays defined the layout as: For Opacity Micromap arrays the output is a lossless representation of original input expressed as a D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC after the header, with pOmmUsageCounts as a GPUVA rather than CPU pointer.</li><li>In D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC specified that indices must be aligned to the index format size.</li><li>In D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC specified that PerOMMDescs (D3D12_RAYTRACING_OPACITY_MICROMAP_DESC) must be 4 byte aligned.</li><li>In D3D12_RAYTRACING_GEOMETRY_LINKAGE_DESC define that OpacityMicromapBaseLocation offsets the range of OMMs in the array that are used in the non-indexed case. This field already was defined to offset indices in the indexed OMM case.</li><li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS allow D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_COMPACTION to work for OMM Array builds (in addition to TLAS/BLAS before). Similar clarifications for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_COMPACTED_SIZE.</li><li>In D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC added support for 8 bit indices.</li><li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS defined that ALLOW_UPDATE and ALLOW_OMM_LINKAGE_UPDATE flags can be independently specified, and thus on a subsequent update, only the relevant inputs are referenced (need to be provided) based on the flags initially used.</li><li>In D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC specified that pOMMUsageCounts aren’t used and can be left null if ALLOW_OMM_LINKAGE_UPDATE is specified.</li><li>Renamed D3D12_SERIALIZED_RAYTRACING_BOTTOM_LEVEL_ACCELERATION_STRUCTURE_HEADER to D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1, which is now designed to be a backwards compatible replacement to the existing header D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER which no longer needs to be used by apps or drivers (without having to worry about compatibility). The new header enables support for serialized BLAS to reference linked OMMs.</li> |
| v1.26 | 12/9/2024 | <li>Clarified that during ray traversal and TMax gets updated when a hit is committed (already in spec), that is internal to the traversal, not visiable to the application.</li> |
| v1.27 | 1/9/2025 | <li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS revisited recent change, making it now that ALLOW_OMM_LINKAGE_UPDATE can only be specified with ALLOW_UPDATE always specified. Meaning positions are always supplied in an update whether or not omm linkage is also being updated.</li> |
| v1.28 | 1/30/2025 | <li>Removed the usage count histogram from D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC, as it wasn’t needed. The histogram in D3D12_RAYTRACING_OPACITY_MICROMAP_ARRAY_DESC for OMM array builds is still present. Renamed the histogram entry struct from D3D12_RAYTRACING_OPACITY_MICROMAP_USAGE_COUNTS to D3D12_RAYTRACING_OPACITY_MICROMAP_HISTOGRAM_ENTRY.</li> |
| v1.29 | 2/20/2025 | <li>In D3D12_RAYTRACING_OPACITY_MICROMAP_DESC made non-breaking change to switch members to bitfields so that the UINT16 Format member can be a more strongly typed equivalent: D3D12_RAYTRACING_OPACITY_MICROMAP_FORMAT Format : 16;.</li><li>In D3D12_RAYTRACING_GEOMETRY_OMM_LINKAGE_DESC clarified that OpacityMicromapIndexFormat can be DXGI_FORMAT_UNKNOWN when no index buffer is used.</li> |
| v1.3 | 5/28/2025 | <li>In D3D12_RAYTRACING_TIER added D3D12_RAYTRACING_TIER_1_2, containing Opacity Micromaps and Shader Execution Reordering. Pointed out that the HLSL portions of these features (all of SER and a small part of OMMs) are part of Shader Model 6.9 which is in preview).</li><li>For Shader Execution Reordering, updated spec to mirror contents of HLSL Shader Execution Reordering.</li><li>For D3D12_RAYTRACING_SERIALIZED_BLOCK_TYPE and D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_SERIALIZATION_DESC loosened the behavior so that the list may include null entries for geometries that don’t have OMMs (that consumers must simply ignore). Other devices might happen prune these so the list only has OMMs.</li><li>In MaybeReorderThread noted that DXC currently has a bug where “using namespace dx;” to avoid “dx::” before calling MaybeReorderThread() results in incorrect DXIL generation.</li> |
| v1.31 | 6/9/2025 | <li>In the HLSL suboboject definition for HitGroup, corrected the spec which listed a HitGroup object, which doens’t even exist in in HLSL. Instead there is a TriangleHitGroup and ProceduralPrimitiveHitGroup, which are now each documented.</li><li>Fixed incorrect argument listing for HitObject::MakeMiss()</li> |
| v1.32 | 6/19/2025 | <li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS, for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_OMM_LINKAGE_UPDATE clarified that replacing an OMM array at the same location requires a linkage update for BLAS’s referencing it even though the linkage pointer didn’t change.</li><li>Name fix: HitObject::LoadLocalRootTableConstant was incorrectly named LoadLocalRootArgumentsConstant (stale name before rename). The compiler is correct.</li> |
| v1.33 | 6/27/2025 | <li>In Shader table memory initialization, clarify the local root signature size calculation and shader table layout requirements.</li> |
| v1.34 | 6/30/2025 | <li>In D3D12_SERIALIZED_RAYTRACING_ACCELERATION_STRUCTURE_HEADER1, clarified that this serialization header is also used for OMM Arrays. |
| v1.35 | 11/5/2025 | <li>In D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX, added special index value D3D12_RAYTRACING_OPACITY_MICROMAP_SPECIAL_INDEX_CLUSTER_SKIP_OMM that is only applicable to cluster or cluster template builds in the DXR2 spec: The OpacityMicromapIndexBuffer field of D3D12_RTAS_OPERATION_BUILD_CLAS_FROM_TRIANGLES_ARGS.</li> |
| v1.36 | 1/8/2026 | <li>In D3D12_RAYTRACING_PIPELINE_FLAGS and RayQuery flags added D3D12_RAYTRACING_PIPELINE_FLAG_ALLOW_CLUSTERED_GEOMETRY and RAYQUERY_FLAG_ALLOW_CLUSTERED_GEOMETRY for opting in to the presence of clustered geometry in the acceleration structure being accessed.</li> |
| v1.37 | 1/26/2026 | <li>Added support for tools visualization of clustered geometry and patitioned tlas by extending the existing D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS option. D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER, and added new types to D3D12_RAYTRACING_ACCELERATION_STRUCTURE_TYPE that are only valid in D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_TOOLS_VISUALIZATION_HEADER.</li> |
| v1.38 | 2/16/2026 | <li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE, updated the description for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE_VISUALIZATION_DECODE_FOR_TOOLS to relax the requirements around Opacity Micromap data such that the returned data doesn’t have to exactly match the user input other than functionally it would behave the same way. OMM special indices are still preserved though (non special not coverted to special or vice versa).</li><li>Cleaned up TriangleObjectPositions() and the RayQuery variants to match final HLSL spec, where these intrinsics now return BuiltInTrianglePositions. Also mentioned these are a required feature in SM 6.10 (not released yet).</li><li>Added D3D12_FEATURE_OPTIONS_NNN, NNN to be determined, with a ClustersAndPTLASSupported cap that lets devices support these features without having to meet all D3D12_RAYTRACING_TIER_2_0 requirements (in particular Opacity Micromaps support from Tier 1.2). So while Tier 2.0 requires all features, a device could support everything except OMM by reporting Tier 1.1 and ClustersAndPTLASSupported. This cap also implies Shader Model 6.10 support. A device can also just support Tier 1.1 plus TriangleObjectPositions() by supporting SM 6.10 only (which would also bring in SER from 6.9).</li> |
| v1.39 | 3/16/2026 | <li>For clustered geometry, data access is now controlled via D3D12_RTAS_OPERATION_FLAG_ALLOW_DATA_ACCESS at the operation level, replacing the former per-CLAS flag. Updated TriangleObjectPositions(), RayQuery::CandidateTriangleObjectPositions() and RayQuery::CommittedTriangleObjectPositions() to describe clustered geometry requirements including the D3D12_RTAS_CLUSTER_OPERATION_CLAS_FLAG_DISALLOW_DATA_ACCESS per-operation opt-out and the CBLAS consistency requirement. Updated D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_DATA_ACCESS to clarify it applies to BLAS builds only, with a cross-reference to the RTAS operation flag for clusters.</li> |
| v1.40 | 3/30/2026 | <li>In Payload access qualifiers, added Value preservation across stage transitions to Advanced examples with step-by-step walkthroughs clarifying: (1) a field marked only write(caller) : read(caller) is guaranteed to preserve the caller’s value even if closesthit writes to its local copy, and (2) recursive TraceRay with payload forwarding gives each call its own actual payload, so the outer caller still observes the original value while closesthit observes its written value after the nested call returns.</li><li>In CheckDriverMatchingIdentifier, clarified that drivers supporting raytracing must not return D3D12_DRIVER_MATCHING_IDENTIFIER_UNSUPPORTED_TYPE for D3D12_SERIALIZED_DATA_RAYTRACING_ACCELERATION_STRUCTURE. The driver must recognize the type and return an appropriate status such as UNRECOGNIZED, INCOMPATIBLE_VERSION, or COMPATIBLE_WITH_DEVICE.</li> |
| v1.41 | 5/6/2026 | <li>For EmitRaytracingAccelerationStructurePostbuildInfo() and CopyRaytracingAccelerationStructure() added a note clarifying which postbuild-info types and copy modes apply to CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS: only _SERIALIZE, _DESERIALIZE and _VISUALIZATION_DECODE_FOR_TOOLS modes (and the corresponding _SERIALIZATION / _TOOLS_VISUALIZATION postbuild-info types).</li><li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_POSTBUILD_INFO_TYPE, extended the _TOOLS_VISUALIZATION and _SERIALIZATION entries to enumerate the additional supported object types (CLAS, Cluster Templates, Cluster BLAS, Partitioned TLAS). Also clarified _CURRENT_SIZE applies to TLAS, BLAS and Opacity Micromap Arrays only, with a pointer to D3D12_RTAS_OPERATION_MODE_GET_SIZES of ExecuteIndirectRTASOperations() for size queries on cluster and partitioned-TLAS objects.</li><li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE, extended the _SERIALIZE and _DESERIALIZE entries to call out that the same modes apply to CLAS, Cluster Templates, Cluster BLAS, and Partitioned TLAS, and that the order-independence rule extends to those reference relationships (Cluster BLAS to CLAS, Partitioned TLAS to BLAS).</li> |
| v1.42 | 5/13/2026 | <li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAGS, for D3D12_RAYTRACING_ACCELERATION_STRUCTURE_BUILD_FLAG_ALLOW_UPDATE and _PERFORM_UPDATE, made the existing TLAS/BLAS-only applicability explicit by adding “Not supported for Opacity Micromap Array builds where update doesn’t apply.” Behavior is unchanged; this only removes the implicit-by-omission exclusion that was easy to miss when reading the flag list.</li> |
| v1.43 | 5/17/2026 | <li>In CopyRaytracingAccelerationStructure() SourceAccelerationStructureData parameter, added a Cluster-BLAS exception to the “operation only involves the data pointed to” rule: serializing or tools-visualization-decoding a Cluster BLAS reads through to the referenced CLAS, so all referenced CLAS must be valid for the duration of the operation on the GPU timeline.</li><li>In EmitRaytracingAccelerationStructurePostbuildInfo() pSourceAccelerationStructureData parameter, added the symmetric Cluster-BLAS callout for the _SERIALIZATION and _TOOLS_VISUALIZATION postbuild-info sizing queries.</li><li>In D3D12_RAYTRACING_ACCELERATION_STRUCTURE_COPY_MODE, extended the _SERIALIZE and _VISUALIZATION_DECODE_FOR_TOOLS mode-level entries with the same Cluster-BLAS-to-CLAS source-liveness exception, and noted that deserialization order semantics remain order-independent (consistent with the existing TLAS-to-BLAS rule).</li><li>Cleaned up some stale references to the name ReorderThread which was renamed to MaybeReorderThread.</li> |
| v1.44 | 6/26/2026 | <li>In GetRaytracingAccelerationStructurePrebuildInfo() and D3D12_BUILD_RAYTRACING_ACCELERATION_STRUCTURE_INPUTS, the spec already said that any parameter that is referenced via D3D12_GPU_VIRTUAL_ADDRESS will not be accessed by the operation. So this memory does not need to be initialized yet or be in a particular resource state. Whether GPU addresses are null or not can be inspected by the operation, even though the pointers are not dereferenced. Added this: If actual GPUVAs aren’t known at the time of the call, dummy non-zero values can be used just for the purposes for the prebuild call for entires that will be replaced with real non-null GPUVAs for build.</li> |
| v1.45 | 7/10/2026 | <li>Added TemplateInstancePrefersCOMPRESSED1 to D3D12_FEATURE_D3D12_OPTIONS_NNN and the corresponding DDI options structure. This performance preference guides selection of the stored vertex format for cluster template instances and is reported as FALSE when clustered templates are unsupported.</li> |