Rigged Hand Visualizer [Experimental]
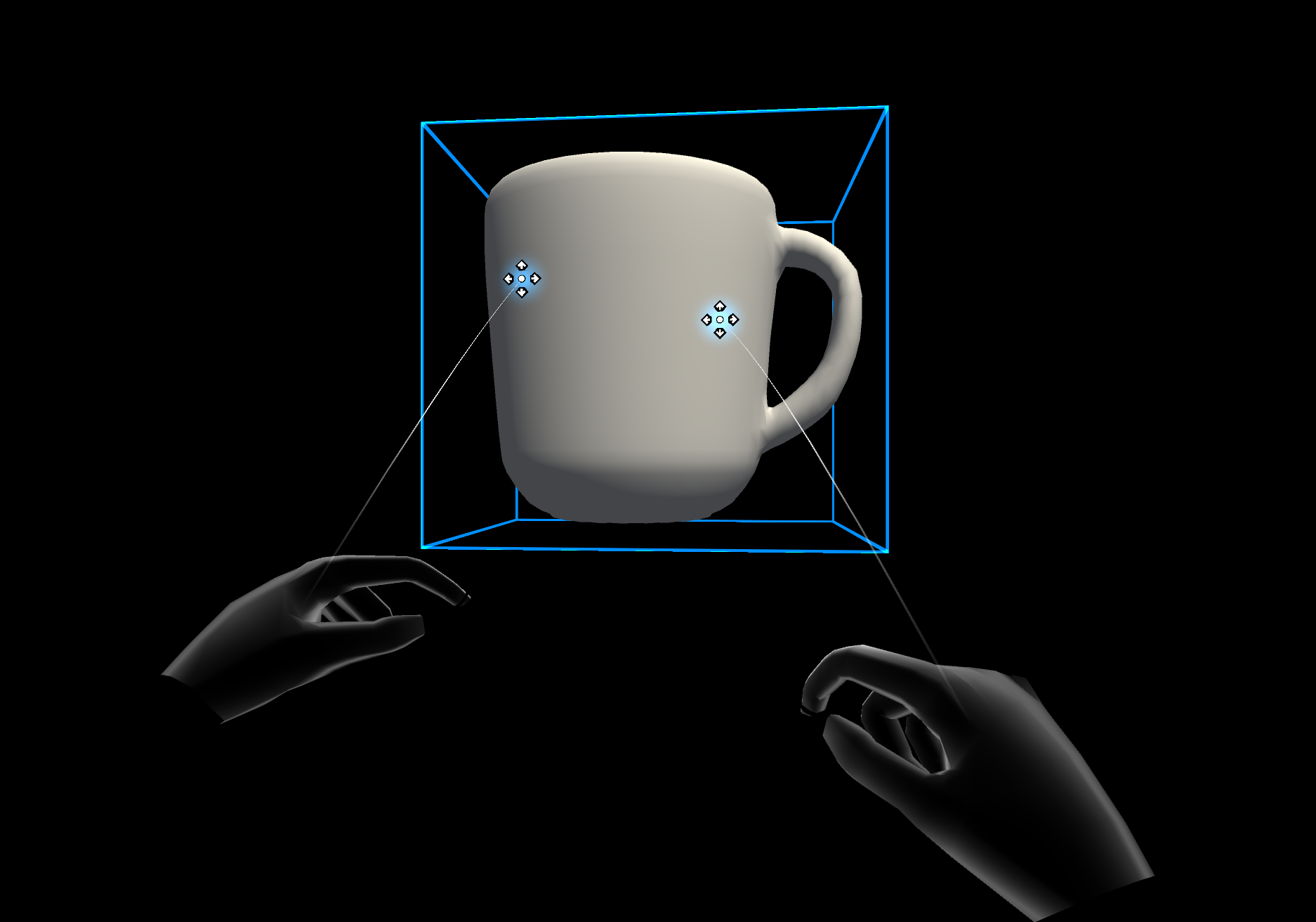
The RiggedHandVisualizer can be used to control a SkinnedMesh to visualize the hands.
This works on HoloLens 2 with detected hands, when using the Ultraleap sensor or with input simulation in the Unity editor.
Windows Mixed Reality headset with attached Ultraleap sensor

Unity Editor InputSimulation
Example scene
You can find and example in the RiggedHandVisualizer scene under: MRTK/Examples/Experimental/RiggedHandVisualizer/Scenes/
Using the RiggedHandVisualizer in your scene
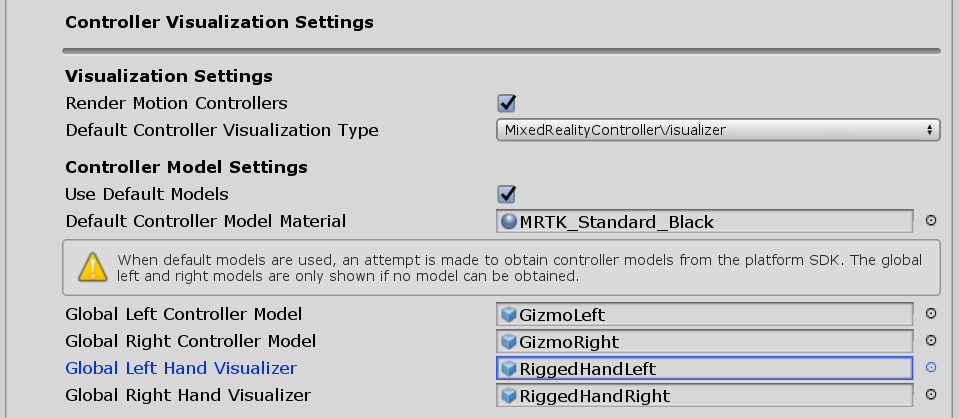
To enable the use of rigged hand visualization, select the MixedRealityToolkit game object in the hierarchy and within the Input Configuration Profile navigate to
Controllers > Controller Visualization Settings > Global Left Hand Visualizer
Set it to use a prefab with the skinned mesh and RiggedHandVisualizer component. Do the same for the right hand. RiggedHandLeft and RiggedHandRight prefabs are included in the MRTK as defaults, but you can also configure your own skinned mesh models.
Setting up a custom rigged mesh
The left and right hand use separate models with the following joint structure.
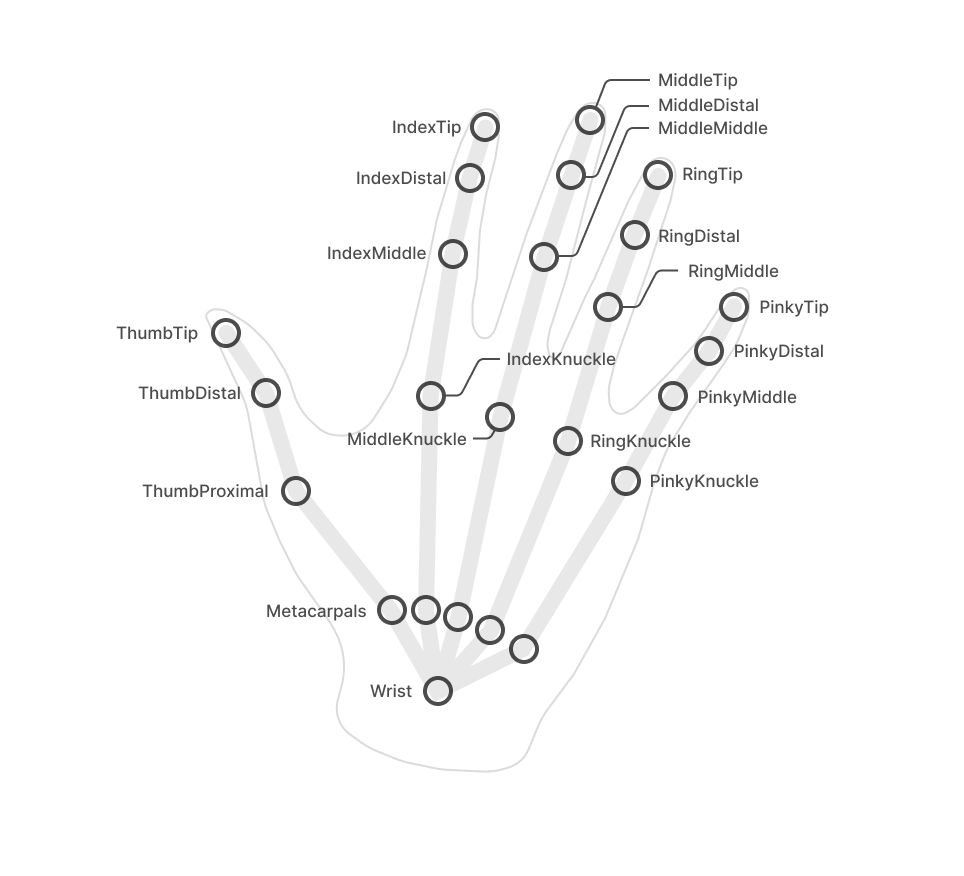
After importing the model in Unity create a prefab that uses it and add the RiggedHandVisualizer component. Assign the wrist and palm transforms. And assign the metacarpal transforms for each finger to the corresponding variables. The rest of the finger transforms are assumed to be hierarchical children of the metacarpal transforms.
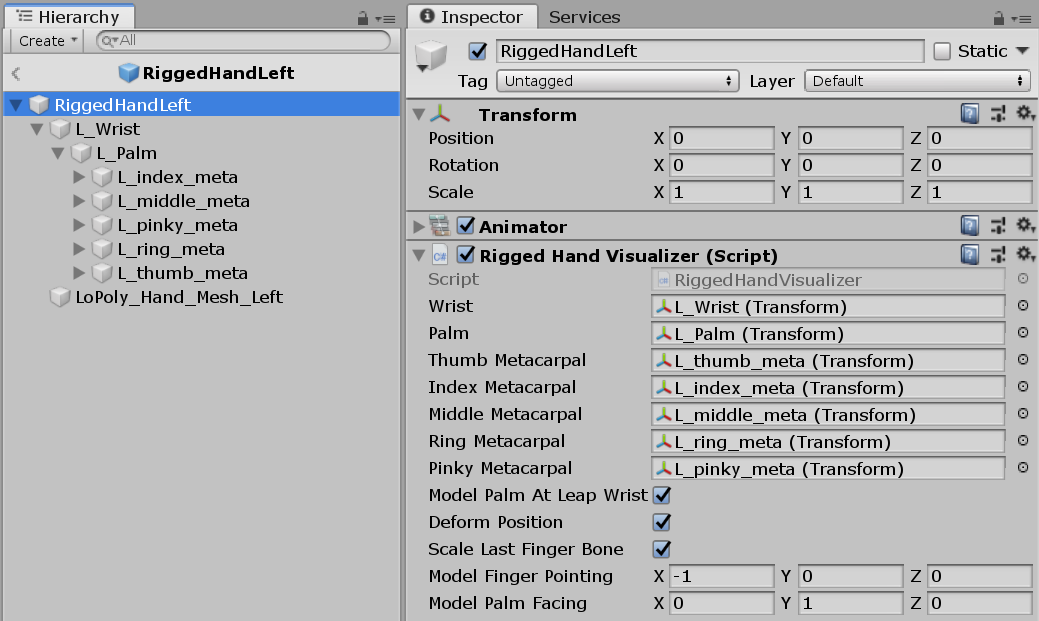
Orientation correction
Since models can be imported with different orientations you may need to apply a correction.
Configure Model Finger Pointing and Model Palm Facing values with the cardinal axes that they are closest to.
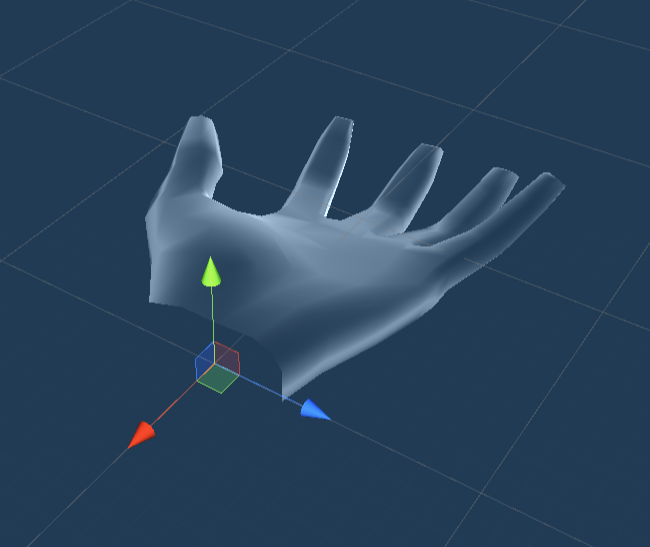
The easiest way to find these axes is to look at the model in its default orientation after importing it in Unity. Make sure the root, palm and wrist nodes have an orientation of 0, 0, 0
In the model below you can see that the palm is pointing in the Y-direction (green arrow) so the Model Palm Facing is set to 0, 1, 0. The fingers are pointing in the negative X-direction (red arrow) so the Model Finger Pointing is set to -1, 0, 0.
Model Palm At Leap Wrist
Hands are typically rigged in 3D packages with the palm transform near the wrist. Uncheck this if your model's palm transform is at the center of the palm similar to Leap API hands.
Deform Position
Allows the mesh to be stretched to align with finger joint positions.
Scale Last Finger Bone
Because bones only exist at their roots in model rigs, the length of the last fingertip bone is lost when placing bones at positions in the tracked hand. This option scales the last bone along its length axis to match its bone length to the tracked bone length. This option only has an effect if Deform Positions In Fingers is enabled.