Hardware Kernels¶
Hardware kernels are layer-level operations (LayerNorm, MatMul, Attention) implemented as self-contained streaming circuits for FPGAs.
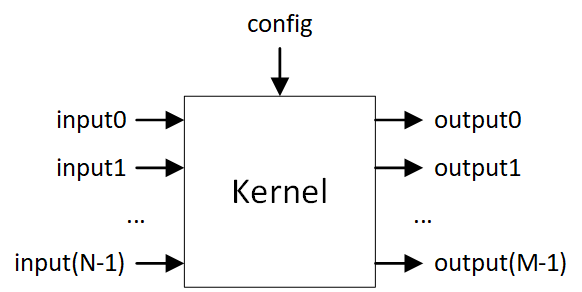
Brainsmith constructs dataflow accelerators by iteratively applying graph transformations to lower ONNX nodes to matching kernels, connected via streaming interfaces. During this process, kernels are modeled by the relationship between their input and output streams with the internal architecture largely abstracted away.
Designed for Agility¶
The kernel system is the foundation of Brainsmith's agility, enabling key architectural capabilities:
1. Schema-Driven Automation - All integration code, constraint validation, and DSE parameters are auto-derived from the kernel's schema, allowing hardware engineers to create efficient kernels without onerous compiler integration work.
2. Standardized DSE Interface - Structural and optimization design parameters construct a kernel design space with unified functions for efficient exploration and testing.
3. Automated Testing Framework - Validate parity against target ONNX operators at various levels of abstraction with a simple testbench.
See Dataflow Modeling for theoretical foundations.
Layer-Level Granularity¶
Unlike MLIR-based or fully HLS toolchains that fully decompose the model into primitive operations, Brainsmith maintains layer-level design abstraction throughout the compiler. This has several key advantages that further serve the goals of agility and separation of concerns:
-
Preserve Design Space - Neural networks are expressed as layers in PyTorch/ONNX. Preserving this granularity enables natural extension from AI frameworks while maintaining semantic meaning through the compilation pipeline.
-
Prevent Exponential Explosion - Decomposing layers into individual operations (add, multiply, shift) creates thousands of tiny blocks, making design space exploration computationally intractable.
-
Enable Hand Optimization - Hardware engineers can optimize kernels at the layer scale without deep AI model knowledge, achieving performance that auto-generated designs cannot match while maintaining flexibility through automated composition.
Three-File Structure¶
Each kernel consists of:
- Schema + KernelOp (
kernel.py) - Interface definitions, validation constraints, and ONNX-to-hardware transformation logic - Backend (
kernel_hls.pyorkernel_rtl.py) - Code generation that bridges schema to implementation - Hardware (
kernel.hpporkernel.v) - Actual RTL/HLS implementation with standard interfaces
This separation enables:
- Multiple backends for the same kernel (HLS vs RTL, vendor-specific optimizations)
- Schema-driven automation (DSE parameter derivation, validation, interface generation)
- Hardware expertise isolation (implement kernels without compiler knowledge)
Quick Start: Minimum Kernel¶
project/kernels/my_kernel/
├── my_kernel.py # Schema + transformation logic
├── my_kernel_hls.py # Code generation backend
└── my_kernel.hpp # Hardware implementation
my_kernel.py - Schema + KernelOp:
import brainsmith.dataflow as df
from brainsmith.registry import kernel
from onnx import helper
MY_KERNEL_SCHEMA = df.KernelSchema(
name="MyKernel",
inputs=[df.InputSchema(name="input", block_tiling=df.FULL_SHAPE, stream_tiling=["SIMD"])],
outputs=[df.OutputSchema(name="output", block_tiling=df.FULL_SHAPE, stream_tiling=["PE"])],
)
@kernel(description="Custom kernel", author="Your Name")
class MyKernel(df.KernelOp):
@classmethod
def build_schema(cls, node, model):
return MY_KERNEL_SCHEMA
@classmethod
def can_infer_from(cls, node, model):
return node.op_type == "MyOnnxOp" # Pattern match ONNX nodes
@classmethod
def infer_from(cls, node, model, insert_index):
hw_node = helper.make_node("MyKernel", inputs=list(node.input),
outputs=list(node.output), domain="brainsmith.kernels")
return df.TransformationResult(nodes_to_insert=[hw_node], nodes_to_remove=[node])
def execute_node(self, context, graph):
# Reference numpy implementation for validation
pass
my_kernel_hls.py - Backend:
from finn.custom_op.fpgadataflow.hlsbackend import HLSBackend
from brainsmith.registry import backend
@backend(target_kernel="brainsmith:MyKernel", language="hls")
class MyKernel_hls(MyKernel, HLSBackend):
def defines(self, var):
# Extract parameters from self.design_point
point = self.design_point
simd = point.inputs["input"].stream_shape[-1]
self.code_gen_dict["$DEFINES$"] = [f"#define SIMD {simd}"]
def docompute(self):
self.code_gen_dict["$DOCOMPUTE$"] = ["my_kernel<SIMD>(in0, out);"]
my_kernel.hpp - Hardware:
template<unsigned SIMD, typename TI, typename TO>
void my_kernel(hls::stream<hls::vector<TI, SIMD>>& in,
hls::stream<hls::vector<TO, SIMD>>& out) {
// Your hardware implementation
}
Register in __init__.py:
from .my_kernel import MyKernel
from .my_kernel_hls import MyKernel_hls
__all__ = ["MyKernel", "MyKernel_hls"]
Use in blueprint:
Complete Example: LayerNorm Kernel¶
The LayerNorm kernel demonstrates a complete production implementation with schema definition, ONNX transformation, HLS backend, and hardware code.
Implementation files:
layernorm.py- Schema definition withFULL_DIMtiling,derive_dim()for matching parallelization, epsilon parameter, and ONNX-to-hardware transformationlayernorm_hls.py- HLS backend extracting parameters from design_point and generating C++ defines/docomputelayernorm.hpp- HLS C++ implementation with AXI-Stream interfaces and normalization logic
Key patterns demonstrated:
- Schema-driven automation (SIMD parameter auto-extracted from
stream_tiling) - Dimension derivation (
derive_dim()) to match input/output parallelization - Validation constraints (
AttrComparefor epsilon > 0) - Pattern matching (
can_infer_from()checks for FuncLayerNorm with axis=-1) - Multiple inheritance (LayerNorm + HLSBackend) for code generation
- Reference implementation (
execute_node()) for cppsim validation