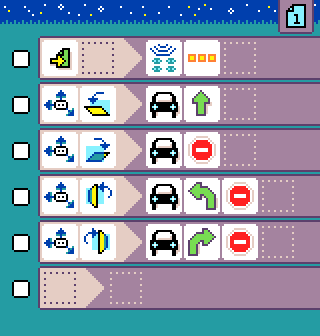
The program starts by setting the radio group displayed by the robot micro:bit. This is the same group that the microcode program will use to communicate with the robot. In this example, we use 3 dots but this is probably different for your robot.

- when
 page starts, do
page starts, do  set radio group to put your robot radio number!
set radio group to put your robot radio number!
The next rule runs when the micro:bit is tilted forward and orders the robot to move forward. The robot will keep moving forward until another commands is received.

Similarly, the next rule tells to the robot to stop when the micro:bit is tilted backward.

When the micro:bit tilts left, tell the robot to turn left then stop.

When the micro:bit tilts right, tell the robot to turn right then stop.
