Meta-World#
Introduction#
This tutorial demonstrates how to use the trace package to optimize a policy for a simulated robot performing a pick-and-place task.
Setup and Installation#
This example requires LLF-Bench in addition to trace. You can install them as follows
git clone https://github.com/microsoft/LLF-Bench.git
cd LLF-Bench
pip install -e .[metaworld]
Let’s start by importing the necessary libraries.
%pip install trace-opt
from autogen import config_list_from_json
import llfbench
import random
import numpy as np
import opto.trace as trace
from opto.optimizers import OptoPrime
from opto.trace.bundle import ExceptionNode
from opto.trace.errors import ExecutionError
Show code cell source
import os
import ipywidgets as widgets
from IPython.display import display
# Function to save the environment variable and API key
def save_env_variable(env_name, api_key):
# Validate inputs
if not env_name.strip():
print("⚠️ Environment variable name cannot be empty.")
return
if not api_key.strip():
print("⚠️ API key cannot be empty.")
return
# Store the API key as an environment variable
os.environ[env_name] = api_key
globals()[env_name] = api_key # Set it as a global variable
print(f"✅ API key has been set for environment variable: {env_name}")
# Create the input widgets
env_name_input = widgets.Text(
value="OPENAI_API_KEY", # Default value
description="Env Name:",
placeholder="Enter env variable name (e.g., MY_API_KEY)",
)
api_key_input = widgets.Password(
description="API Key:",
placeholder="Enter your API key",
)
# Create the button to submit the inputs
submit_button = widgets.Button(description="Set API Key")
# Display the widgets
display(env_name_input, api_key_input, submit_button)
# Callback function for the button click
def on_button_click(b):
env_name = env_name_input.value
api_key = api_key_input.value
save_env_variable(env_name, api_key)
# Attach the callback to the button
submit_button.on_click(on_button_click)
Environment Setup#
Define the environment and helper functions to parse observations.
def parse_obs(obs):
"""Parse the observation string into a dictionary of lists of floats."""
import json
obs = json.loads(obs)
for key in obs:
obs[key] = obs[key].replace("[", "").replace("]", "").split()
obs[key] = [float(i) for i in obs[key]]
return obs
class TracedEnv:
def __init__(self, env_name, seed=0, relative=True):
self.seed = seed
self.env_name = env_name
self.relative = relative
self.init()
def init(self):
random.seed(self.seed)
np.random.seed(self.seed)
self.env = llfbench.make(self.env_name)
self.env.reset(seed=self.seed)
self.env.action_space.seed(self.seed)
self.env.control_mode("relative" if self.relative else "absolute")
self.obs = None
@trace.bundle()
def reset(self):
"""
Reset the environment and return the initial observation and info.
"""
obs, info = self.env.reset()
obs["observation"] = parse_obs(obs["observation"])
self.obs = obs
return obs, info
def step(self, action):
try:
control = action.data if isinstance(action, trace.Node) else action
next_obs, reward, termination, truncation, info = self.env.step(control)
next_obs["observation"] = parse_obs(next_obs["observation"])
self.obs = next_obs
except Exception as e:
e_node = ExceptionNode(
e,
inputs={"action": action},
description="[exception] The operator step raises an exception.",
name="exception_step",
)
raise ExecutionError(e_node)
@trace.bundle()
def step(action):
"""
Take action in the environment and return the next observation
"""
return next_obs
next_obs = step(action)
return next_obs, reward, termination, truncation, info
Rollout Function#
Define a function to perform a rollout using the current policy.
def rollout(env, horizon, controller):
"""Rollout a controller in an env for horizon steps."""
traj = dict(observation=[], action=[], reward=[], termination=[], truncation=[], success=[], info=[])
obs, info = env.reset()
traj["observation"].append(obs)
for t in range(horizon):
controller_input = obs["observation"]
error = None
try:
action = controller(controller_input)
next_obs, reward, termination, truncation, info = env.step(action)
except trace.ExecutionError as e:
error = e
break
if error is None:
traj["observation"].append(next_obs)
traj["action"].append(action)
traj["reward"].append(reward)
traj["termination"].append(termination)
traj["truncation"].append(truncation)
traj["success"].append(info["success"])
traj["info"].append(info)
if termination or truncation or info["success"]:
break
obs = next_obs
return traj, error
Optimize using Trace#
Define the function to optimize the policy using the Trace package.
def optimize_policy(
env_name,
horizon,
memory_size=5,
n_optimization_steps=100,
seed=0,
relative=True,
verbose=False,
model="gpt-4-0125-preview",
):
@trace.bundle(trainable=True)
def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
return [0, 0, 0, 0]
config_list = config_list_from_json("OAI_CONFIG_LIST")
config_list = [config for config in config_list if config["model"] == model]
optimizer = OptoPrime(controller.parameters(), config_list=config_list, memory_size=memory_size)
env = TracedEnv(env_name, seed=seed, relative=relative)
successes = []
returns = []
print("Optimization Starts")
for i in range(n_optimization_steps):
env.init()
traj, error = rollout(env, horizon, controller)
if error is None:
feedback = f"Success: {traj['success'][-1]}\nReturn: {sum(traj['reward'])}"
target = traj["observation"][-1]["observation"]
successes.append(traj["success"][-1])
returns.append(sum(traj["reward"]))
else:
feedback = error.exception_node.create_feedback()
target = error.exception_node
# Add instruction from the LLFbench environment, which contains
# information about the action space and problem background. The original instruction says
# obsrvaiton is a json string. But here we've parsed it as a dict so we
# update the instruction.
instruction = traj["observation"][0]["instruction"].data
infix = "You will get observations of the robot state "
prefix, suffix = instruction.split(infix)
keys = ", ".join(traj["observation"][0]["observation"].data.keys())
suffix = suffix.replace("json strings.", f"dict, where the keys are {keys}.")
# Add an task specific explanation; as the original instruction says
# only it's a pick-place task, which is too vague. We clarify the task.
assert env_name in ["llf-metaworld-pick-place-v2", "llf-metaworld-reach-v2"]
if env_name == "llf-metaworld-pick-place-v2":
hint = prefix + "The goal of the task is to pick up a puck and put it to a goal position. " + infix + suffix
else:
hint = prefix + infix + suffix
optimizer.objective = hint + optimizer.default_objective
optimizer.zero_feedback()
optimizer.backward(target, feedback)
optimizer.step(verbose=verbose)
print(f"Iteration: {i}, Feedback: {feedback}, Parameter: {controller.parameter.data}")
successes.append(traj["success"][-1])
returns.append(sum(traj["reward"]))
print("Final Returns:", sum(traj["reward"]))
return successes, returns
Execute the Optimization Process#
successes, returns = optimize_policy(
env_name="llf-metaworld-pick-place-v2",
horizon=10,
n_optimization_steps=30,
memory_size=5,
seed=0,
relative=True,
verbose='output',
model="gpt-4-0125-preview"
)
Optimization Starts
LLM response:
{
"reasoning": "The task requires adjusting the controller function to generate appropriate action vectors for a Sawyer robot to successfully perform a pick-place task. The feedback from the environment after each action suggests that the predefined controller, which consistently returns a zero vector [0, 0, 0, 0] for any observation, fails to guide the robot towards the goal position effectively. The repeated instruction from the feedback implies that the controller should calculate actions that move the robot arm towards a specific target, which in this case is hinted to be [-0.07, 0.68, 0.12, 0]. The continuous feedback suggesting a move toward these coordinates suggests that the robot needs to adjust its position relative to the puck and possibly close the gripper (though closing the gripper is not explicitly mentioned, it's implied as part of the pick and place task). Therefore, to correct the issue, the controller's code must be modified to generate non-zero action vectors based on the observations of the robot and puck's positions, as well as the goal position.",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n # Calculate direction to move hand towards puck\n direction_to_puck = [puck_pos[0] - hand_pos[0], puck_pos[1] - hand_pos[1], puck_pos[2] - hand_pos[2], 0]\n # Once near the puck, adjust to move towards the goal position\n if abs(hand_pos[0] - puck_pos[0]) < 0.05 and abs(hand_pos[1] - puck_pos[1]) < 0.05 and abs(hand_pos[2] - puck_pos[2]) < 0.05:\n direction_to_goal = [goal_pos[0] - hand_pos[0], goal_pos[1] - hand_pos[1], goal_pos[2] - hand_pos[2], 1]\n return direction_to_goal\n return direction_to_puck"
}
}
Iteration: 0, Feedback: Success: False
Return: 0.06207482910694713, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
# Calculate direction to move hand towards puck
direction_to_puck = [puck_pos[0] - hand_pos[0], puck_pos[1] - hand_pos[1], puck_pos[2] - hand_pos[2], 0]
# Once near the puck, adjust to move towards the goal position
if abs(hand_pos[0] - puck_pos[0]) < 0.05 and abs(hand_pos[1] - puck_pos[1]) < 0.05 and abs(hand_pos[2] - puck_pos[2]) < 0.05:
direction_to_goal = [goal_pos[0] - hand_pos[0], goal_pos[1] - hand_pos[1], goal_pos[2] - hand_pos[2], 1]
return direction_to_goal
return direction_to_puck
LLM response:
{
"reasoning": "The instruction requires improving the controller for a Sawyer robot to perform a pick-place task more effectively, by adjusting the __code0 variable. The feedback throughout the execution suggests that the robot's arm movement and gripper state were not always optimal for achieving the task. Particularly, suggestions to 'keep the gripper closed' or 'open the gripper' indicate the fourth component of the action vector (controlling the gripper state) was often set incorrectly given the task phase (approaching the puck vs. moving the puck towards the goal). Additionally, the directional components of the action vectors sometimes did not align with an efficient path to the puck or the goal, as evidenced by feedback directing to aim towards specific poses. The feedback on the return variable demonstrates that the current logic in __code0, where it attempts to move towards the puck and then the goal with conditions based on proximity, needs refinement to better heed these suggestions and increase overall task success.",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.05 for i in range(3)):\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_pos[i]) < 0.05 for i in range(3)):\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)]\n direction.append(1) # Close the gripper\n else:\n direction = [0, 0, 0, 0] # Do not move if conditions are not met\n return direction"
}
}
Iteration: 1, Feedback: Success: False
Return: 0.10650121803495348, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.05 for i in range(3)):
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) < 0.05 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)]
direction.append(1) # Close the gripper
else:
direction = [0, 0, 0, 0] # Do not move if conditions are not met
return direction
LLM response:
{
"reasoning": "The current controller logic moves the robot's gripper towards the puck and aims to close the gripper once it is close enough to the puck. Then, it tries to move towards the goal with the gripper closed. However, based on the feedback received during the task's execution, the controller does not always close the gripper at the right time or move in the optimal direction after grabbing the puck. Feedback consistently suggests opening the gripper when it might already be open due to misjudgment of actions or positioning. The feedback also often gives specific suggestions for the next pose, implying the controller logic might not effectively adapt to dynamic conditions in the environment, such as the precise position of the puck or the goal. The controller's logic in determining when to open or close the gripper and adjust its position might not be aligning well with these dynamic environmental states, leading to suboptimal task execution.",
"answer": "",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n gripper_open = obs['gripper_distance_apart'][0] > 0.5\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_path[i]) <= 0.04 for i in range(3)) and not gripper_open:\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)]\n direction.append(1) # Close the gripper\n else:\n direction = [0, 0, 0, 0] # Do not move if conditions are not met\n return direction\n"
}
}
Iteration: 2, Feedback: Success: False
Return: 0.08542013551374739, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_path[i]) <= 0.04 for i in range(3)) and not gripper_open:
direction = [goal_pos[i] - hand_pos[i] for i in range(3)]
direction.append(1) # Close the gripper
else:
direction = [0, 0, 0, 0] # Do not move if conditions are not met
return direction
LLM response:
{
"reasoning": "The provided code in __code0 contains a NameError indicating that 'puck_path' is not defined. This occurs because there is a typo in the variable name used in the conditional checking within the 'controller' function. The variable intended to use was 'puck_pos' as it is the correct variable representing the puck's position given in the inputs. The typo led to an attempt to access an undefined variable 'puck_path,' which caused the NameError during the execution. To correct this error, the variable name 'puck_path' should be changed to 'puck_pos' in the conditional statement that checks the proximity of the hand position to the puck's position to decide on closing the gripper and moving towards the goal.",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n gripper_open = obs['gripper_distance_apart'][0] > 0.5\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and not gripper_open:\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)]\n direction.append(1) # Close the gripper\n else:\n direction = [0, 0, 0, 0] # Do not move if conditions are not met\n return direction\n"
}
}
Iteration: 3, Feedback: (NameError) name 'puck_path' is not defined, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and not gripper_open:
direction = [goal_pos[i] - hand_pos[i] for i in range(3)]
direction.append(1) # Close the gripper
else:
direction = [0, 0, 0, 0] # Do not move if conditions are not met
return direction
LLM response:
{
"reasoning": "The problem is to control a robot arm to pick up a puck and place it in the goal position by generating appropriate control actions based on the observed state of the robot and the environment. The current implementation of the feedback controller aims to move the robot's gripper towards the puck, close the gripper once the puck is within reach, and then move the puck towards the goal position. However, multiple consecutive eval actions result in a series of [0, 0, 0, 0] actions, indicating no movement or gripper action even though the feedback consistently highlights that the gripper needs to be closed. A mistake in the controller's logic, specifically related to the condition for closing the gripper, prevents it from ever activating the gripper closing command. The comparison of 'gripper_open = obs['gripper_distance_apart'][0] > 0.5' and subsequent conditions rely on this variable to decide whether to open or close the gripper. The continuous feedback of 'close the gripper' implies that the logic to transition from having the gripper open to closing it upon reaching the puck is not being met as expected.",
"answer": {},
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n gripper_open = obs['gripper_distance_apart'][0] > 0.5\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)]\n direction.append(1) # Close the gripper\n else:\n direction = [0, 0, 0, 0] # Do not move if conditions are not met\n return direction\n"
}
}
Iteration: 4, Feedback: Success: False
Return: 1.1060161998875906, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [goal_pos[i] - hand_pos[i] for i in range(3)]
direction.append(1) # Close the gripper
else:
direction = [0, 0, 0, 0] # Do not move if conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction is to improve the controller function to make a robot arm successfully pick up a puck and place it in a goal position using control actions based on observations of the robot state and the world state. The feedback from the last execution suggests that despite successive attempts to perform pick and place actions, the current controller function does not accomplish the task as expected, indicated by 'Success: False'. The feedback implies that the controller is not generating appropriate action commands (4-dim vectors for robot movement and gripper state) to successfully manipulate the puck towards the goal. The provided controller logic checks if the hand is near the puck and if the gripper is open, but repeatedly fails to execute successful grasping and placing due to incorrect action decisions (reflected in frequent 0,0,0,0 action arrays in the final attempts), and misunderstanding of the gripper's state (gripper_open variable controlling the last dimension of action vector incorrectly). Thus, the issue likely lies in the condition logic for moving towards the puck, grasping it, moving towards the goal, or in monitoring the gripper state.",
"answer": "",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector. \n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n gripper_open = obs['gripper_distance_apart'][0] > 0.5\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)]\n direction.append(1) # Correct the logic to close the gripper only if it's open\n else:\n # If gripper is closed and near the puck, move towards the goal with the gripper closed\n if not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]\n else:\n direction = [0, 0, 0, 0] # No movement if other conditions are not met\n return direction\n"
}
}
Iteration: 5, Feedback: Success: False
Return: 0.09292582122656425, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [goal_pos[i] - hand_pos[i] for i in range(3)]
direction.append(1) # Correct the logic to close the gripper only if it's open
else:
# If gripper is closed and near the puck, move towards the goal with the gripper closed
if not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "To solve the pick-and-place task with the Sawyer robot arm, actions are to be generated based on the robot and world state observations by the given controller code. The controller function is supposed to output a 4-dimensional action vector, where the first three elements control the robot's end effector movement in x, y, z coordinates relatively, and the last element controls the gripper state (open or close). From the feedback, it seems that the robot arm is moving, but not optimally towards completing the task, as indicated by the somewhat consistent low rewards and the final feedback indicating the robot's actions did not succeed in achieving the goal. The feedback messages often suggest opening the gripper or aiming for a specific pose, indicating possible issues with action generation logic in the controller function regarding gripper control and movement towards the puck and goal. The controller function has logic to decide movements based on the positions of the hand, puck, and goal, and the state of the gripper. However, an issue is observed in the current logic where the gripper is supposed to be closed to pick up the puck (when close to it) but seems not to be functioning correctly based on the repeated feedback to shut the gripper. Moreover, the action vectors generated in most steps are of [0,0,0,0], indicating no movement or action to be taken which is consistent with the feedback received of not moving towards the goal efficiently.",
"answer": "",
"suggestion": {
"__code0": "def controller(obs):\n \"\"\"\n A feedback controller that computes the action based on the observation.\n\n Args:\n obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.\n Output:\n action: (list or nd.array) A 4-dimensional vector.\n \"\"\"\n hand_pos = obs['hand_pos']\n goal_pos = obs['goal_pos']\n puck_pos = obs['puck_pos']\n gripper_open = obs['gripper_distance_apart'][0] > 0.5\n # Move towards the puck with the gripper open\n if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:\n direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]\n # Once near the puck, close gripper, and move towards the goal\n elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:\n direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed\n # If gripper is closed and near the puck, move towards the goal with the gripper closed\n elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):\n direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]\n else:\n direction = [0, 0, 0, 0] # No movement if other conditions are not met\n return direction"
}
}
Iteration: 6, Feedback: Success: False
Return: 0.09292582122656425, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction requires adjusting the robot's control code to solve a pick-and-place task more effectively. The feedback within the provided code execution indicates the robot successfully completed the task with a specific score. Examining the previous feedbacks shows a pattern of iterations where adjustments were made to the controller logic, specifically regarding the conditions under which the gripper closes and the movement towards the goal is initiated. The final feedback indicates success, suggesting that the latest adjustments to the controller's logic, which involves not just moving towards the puck with the gripper open but also closing the gripper once near it and then moving towards the goal with the puck, have been effective. The conditions take into account the gripper's status (open or closed), the proximity to the puck, and the direction towards the goal. Each conditional block within the controller function is aimed at handling specific states of the task, such as moving towards the puck, grasping it, and transporting it to the goal. The successful score implies that the logic now correctly identifies the states and transitions between them effectively, reflecting accurate control commands sent to the robot.",
"answer": "No changes needed as the feedback indicates success with the current implementation.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction requires adjusting the robot's control code to solve a pick-and-place task more effectively. The feedback within the provided code execution indicates the robot successfully completed the task with a specific score. Examining the previous feedbacks shows a pattern of iterations where adjustments were made to the controller logic, specifically regarding the conditions under which the gripper closes and the movement towards the goal is initiated. The final feedback indicates success, suggesting that the latest adjustments to the controller's logic, which involves not just moving towards the puck with the gripper open but also closing the gripper once near it and then moving towards the goal with the puck, have been effective. The conditions take into account the gripper's status (open or closed), the proximity to the puck, and the direction towards the goal. Each conditional block within the controller function is aimed at handling specific states of the task, such as moving towards the puck, grasping it, and transporting it to the goal. The successful score implies that the logic now correctly identifies the states and transitions between them effectively, reflecting accurate control commands sent to the robot.",
"answer": "No changes needed as the feedback indicates success with the current implementation.",
"suggestion": {}
}
Iteration: 7, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction asks for a control strategy to solve a pick-place task with a robot arm. The feedback for the current execution is positive, indicating success with a score of 15.866826140399557. Analyzing the documentation and code provided, the eval function executes instructions in *__code0*, which defines a controller function that computes the robot's next action based on its current observation. This action aims to move the robot's gripper towards the puck, close the gripper once it's near the puck, and then move the puck towards the goal position. The feedback throughout the execution process suggests various adjustments to the action vector, indicating the strategies were effective in nearing the task's goal. The feedback on the final output also shows success, meaning that the adjustments made to the *__code0* code based on prior feedbacks contributed to the task's successful completion. Since the feedback indicates a successful execution and the return score is high, suggesting that the task was performed efficiently, there is no need for further changes in the *__code0* code.",
"answer": {},
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction asks for a control strategy to solve a pick-place task with a robot arm. The feedback for the current execution is positive, indicating success with a score of 15.866826140399557. Analyzing the documentation and code provided, the eval function executes instructions in *__code0*, which defines a controller function that computes the robot's next action based on its current observation. This action aims to move the robot's gripper towards the puck, close the gripper once it's near the puck, and then move the puck towards the goal position. The feedback throughout the execution process suggests various adjustments to the action vector, indicating the strategies were effective in nearing the task's goal. The feedback on the final output also shows success, meaning that the adjustments made to the *__code0* code based on prior feedbacks contributed to the task's successful completion. Since the feedback indicates a successful execution and the return score is high, suggesting that the task was performed efficiently, there is no need for further changes in the *__code0* code.",
"answer": {},
"suggestion": {}
}
Iteration: 8, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction requests improving the output of a control action for a robotic arm in a simulation environment based on feedback received. The code provided is a feedback controller function (__code0) that uses the current state of the environment (obs) to decide on the next action to take. The feedback from the most recent action suggests success with a score of 15.866826140399557, indicating that the robotic arm's control strategy effectively moved towards completing the given task. Specifically, the feedback indicates that the progression through different control states (moving towards the puck, gripping the puck, and moving towards the goal) worked well with the implemented logic. Since the feedback on the output indicates success, there's no need to change the values of any variables or the implementation of the __code0 function. The conditions for movement, gripper action, and goal orientation have been met as intended in this instance. Given the success and score received, the system's objective to control the robot arm to solve a pick-place task using the provided action commands was achieved.",
"answer": "No change required.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction requests improving the output of a control action for a robotic arm in a simulation environment based on feedback received. The code provided is a feedback controller function (__code0) that uses the current state of the environment (obs) to decide on the next action to take. The feedback from the most recent action suggests success with a score of 15.866826140399557, indicating that the robotic arm's control strategy effectively moved towards completing the given task. Specifically, the feedback indicates that the progression through different control states (moving towards the puck, gripping the puck, and moving towards the goal) worked well with the implemented logic. Since the feedback on the output indicates success, there's no need to change the values of any variables or the implementation of the __code0 function. The conditions for movement, gripper action, and goal orientation have been met as intended in this instance. Given the success and score received, the system's objective to control the robot arm to solve a pick-place task using the provided action commands was achieved.",
"answer": "No change required.",
"suggestion": {}
}
Iteration: 9, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction asks for modifying the values of the variables to improve the output based on the feedback received from the environment after executing the actions calculated by the controller function. The feedback provided in the Outputs and Others section of the latest execution indicates success, with a return of 15.866826140399557 points. This means the actions applied to control the robot, as calculated by the controller function, were successful in achieving the desired task of picking up a puck and placing it at a goal position over multiple time steps. Since the feedback indicates a successful execution with a high return score, it implies the controller function's logic for generating actions based on the observations is effective in fulfilling the task requirements. Therefore, no changes are required to the current definition of the `__code0` variable, which contains the `controller` function. The varied feedback from past executions suggests that adjustments made to the `controller` function logic in response to feedback have led to successful task completion in the latest execution.",
"answer": "",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction asks for modifying the values of the variables to improve the output based on the feedback received from the environment after executing the actions calculated by the controller function. The feedback provided in the Outputs and Others section of the latest execution indicates success, with a return of 15.866826140399557 points. This means the actions applied to control the robot, as calculated by the controller function, were successful in achieving the desired task of picking up a puck and placing it at a goal position over multiple time steps. Since the feedback indicates a successful execution with a high return score, it implies the controller function's logic for generating actions based on the observations is effective in fulfilling the task requirements. Therefore, no changes are required to the current definition of the `__code0` variable, which contains the `controller` function. The varied feedback from past executions suggests that adjustments made to the `controller` function logic in response to feedback have led to successful task completion in the latest execution.",
"answer": "",
"suggestion": {}
}
Iteration: 10, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction asks for an improvement in the controller logic based on the feedback provided for the robot's actions, to more effectively achieve the task's goal state of picking and placing a puck. The `__code0` variable contains the Python code for the controller function that takes observations about the robot's state and the world state to output action commands for the robot. This function's logic determines how the robot moves towards the puck, grabs it, and then moves to a goal position. The feedback from the system indicates that the variable values and logic in `__code0` have been successful in guiding the robot towards completing the task, hence there is no suggestion for improvement highlighted. Thus, no change in the variable `__code0` is necessary as the feedback confirms the success and proper functioning of the current implementation.",
"answer": "TERMINATE"
}
Iteration: 11, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task involves controlling a Sawyer robot arm by providing the appropriate control inputs over multiple steps to achieve a specified goal. The feedback indicates the robot's progress towards the goal, such as moving closer to the puck, needing to close the gripper, or adjusting the move direction. The control inputs include moving the robot's arm in the x, y, z directions and controlling the gripper state. The given controller function computes these controls based on the robot's and the puck's positions, the gripper's state, and the goal position. The feedback also suggests specific poses or adjustments to the controls to achieve the task more efficiently. As the feedback indicates success and a specific return value, and there are no specific errors or requirements for code adjustment mentioned in the feedback, no changes to the __code0 variable are necessary. The controller logic appears to function as intended, guiding the robot through the task towards the goal.",
"answer": "No changes needed",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task involves controlling a Sawyer robot arm by providing the appropriate control inputs over multiple steps to achieve a specified goal. The feedback indicates the robot's progress towards the goal, such as moving closer to the puck, needing to close the gripper, or adjusting the move direction. The control inputs include moving the robot's arm in the x, y, z directions and controlling the gripper state. The given controller function computes these controls based on the robot's and the puck's positions, the gripper's state, and the goal position. The feedback also suggests specific poses or adjustments to the controls to achieve the task more efficiently. As the feedback indicates success and a specific return value, and there are no specific errors or requirements for code adjustment mentioned in the feedback, no changes to the __code0 variable are necessary. The controller logic appears to function as intended, guiding the robot through the task towards the goal.",
"answer": "No changes needed",
"suggestion": {}
}
Iteration: 12, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task involves commanding a robot to move towards a puck, grip it, and then move it to a specified goal position. The sequence of steps and the corresponding evaluations through eval and getitem functions indicate iterative steps the robot takes, feedback from the environment on those steps, and adjustments in the following steps based on the received observations. The controller uses observations such as the robot's hand position, the puck's position, and the state of the gripper (open or closed) to decide the next move. In all provided feedback instances, the outcome was successful with the same return value, suggesting that the implemented controller logic successfully handled the pick and place task as specified, with adjustments made in response to environmental feedback. The repeated successful feedback indicates no further changes to the __code0 variable are necessary since the objective of controlling the robot's arm to solve the given task has been achieved under the mentioned constraints and execution sequence.",
"answer": "No changes are needed as the feedback indicates successful completion of the task with the given controller logic.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task involves commanding a robot to move towards a puck, grip it, and then move it to a specified goal position. The sequence of steps and the corresponding evaluations through eval and getitem functions indicate iterative steps the robot takes, feedback from the environment on those steps, and adjustments in the following steps based on the received observations. The controller uses observations such as the robot's hand position, the puck's position, and the state of the gripper (open or closed) to decide the next move. In all provided feedback instances, the outcome was successful with the same return value, suggesting that the implemented controller logic successfully handled the pick and place task as specified, with adjustments made in response to environmental feedback. The repeated successful feedback indicates no further changes to the __code0 variable are necessary since the objective of controlling the robot's arm to solve the given task has been achieved under the mentioned constraints and execution sequence.",
"answer": "No changes are needed as the feedback indicates successful completion of the task with the given controller logic.",
"suggestion": {}
}
Iteration: 13, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction is to adjust the controller code (__code0 variable) for a robotic arm to improve its performance in a pick-and-place task based on the given feedback. The feedback indicates a successful outcome with a return of 15.866826140399557, suggesting that the changes made or the actions proposed by the controller code are effectively accomplishing the task. Since all given past feedbacks are identical and indicate success with the same return value, it implies that the controller function definition has consistently resulted in successful task execution across different instances or attempts. Given the feedback is uniformly positive and suggests that the code is functioning as expected in directing the robotic arm to fulfill the pick-and-place task, no modifications to the __code0 variable are necessary.",
"answer": {},
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction is to adjust the controller code (__code0 variable) for a robotic arm to improve its performance in a pick-and-place task based on the given feedback. The feedback indicates a successful outcome with a return of 15.866826140399557, suggesting that the changes made or the actions proposed by the controller code are effectively accomplishing the task. Since all given past feedbacks are identical and indicate success with the same return value, it implies that the controller function definition has consistently resulted in successful task execution across different instances or attempts. Given the feedback is uniformly positive and suggests that the code is functioning as expected in directing the robotic arm to fulfill the pick-and-place task, no modifications to the __code0 variable are necessary.",
"answer": {},
"suggestion": {}
}
Iteration: 14, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "According to the instruction, the goal was to help guide adjustments to the robot controller function to achieve a pick and place task more efficiently, based on feedback from the environment and the robot's performance. The provided code defines a controller function that uses the robot's observations to decide on actions to move a puck to a target location. The function takes into consideration the robot's hand position, the puck's position, whether the gripper is open or closed, and the goal position to generate actions.\n\nThe feedback within 'TracedEnv.step.<locals>.step93', 'TracedEnv.step.<locals>.step94', and subsequent steps, indicates that the robot's gripper action and movements are responding correctly to the sequence of observations and their associated conditions defined in __code0. This leads to incremental improvements in performance, as evidenced by the increasing rewards and the feedback messages encouraging continuation of the current strategy. \n\nGiven the success feedback and the specifics indicating good progress ('10.0 points for you. Your progress is great! Continue down the same path. I recommend that you move to [0.04 0.88 0.24 1. ].'), it implies that the adjustments made to the variable '__code0' (the control function) are appropriate and no further code changes are suggested.",
"answer": "No changes are needed as the feedback indicates success and recommends continuing down the same path. The robot's control actions are aligned with achieving the task's objectives.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "According to the instruction, the goal was to help guide adjustments to the robot controller function to achieve a pick and place task more efficiently, based on feedback from the environment and the robot's performance. The provided code defines a controller function that uses the robot's observations to decide on actions to move a puck to a target location. The function takes into consideration the robot's hand position, the puck's position, whether the gripper is open or closed, and the goal position to generate actions.\n\nThe feedback within 'TracedEnv.step.<locals>.step93', 'TracedEnv.step.<locals>.step94', and subsequent steps, indicates that the robot's gripper action and movements are responding correctly to the sequence of observations and their associated conditions defined in __code0. This leads to incremental improvements in performance, as evidenced by the increasing rewards and the feedback messages encouraging continuation of the current strategy. \n\nGiven the success feedback and the specifics indicating good progress ('10.0 points for you. Your progress is great! Continue down the same path. I recommend that you move to [0.04 0.88 0.24 1. ].'), it implies that the adjustments made to the variable '__code0' (the control function) are appropriate and no further code changes are suggested.",
"answer": "No changes are needed as the feedback indicates success and recommends continuing down the same path. The robot's control actions are aligned with achieving the task's objectives.",
"suggestion": {}
}
Iteration: 15, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The given instruction is about controlling a Sawyer robot arm to perform a pick and place task, which involves moving the robot's end effector to pick up a puck and place it at a specified goal position. The feedback provided indicates that the execution of the task was successful, achieving a return of 15.866826140399557, which means the actions computed by the controller led to the desired goal state efficiently. Considering the code given, there is a feedback controller defined that decides action vectors based on the observation of the robot state and the puck state. The feedback on the code's execution does not suggest any need for improvements or adjustments in the algorithm as it achieves the task successfully. The feedback from past executions of the code all indicates success with the same return value, reinforcing that the implementation of the controller is effective in achieving the task goals set in the instructions.",
"answer": "TERMINATE",
"suggestion": {}
}
Iteration: 16, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "According to the instruction, the given controller's code is meant to guide a Sawyer robot arm in performing a pick-and-place task. The feedback suggests that the current implementation is successful since it achieved a positive result and return value. The code's logic takes into consideration the position of the robot's hand relative to both the puck and the goal, as well as whether the gripper is open or closed, to decide on the next action. The actions are calculated and executed over multiple steps, with each step moving closer to the goal according to the feedback. This series of actions, based on observations at each step, shows that the controller is properly aligning the robot's actions with the goal by first moving towards the puck, grasping it, and then moving towards the goal position while holding the puck. Since the feedback for the resultant output is positive and indicates success without pointing out any errors in logic or suggesting improvements needed in the controller code, there appears to be no need for modification to the provided code (__code0).",
"answer": {},
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "According to the instruction, the given controller's code is meant to guide a Sawyer robot arm in performing a pick-and-place task. The feedback suggests that the current implementation is successful since it achieved a positive result and return value. The code's logic takes into consideration the position of the robot's hand relative to both the puck and the goal, as well as whether the gripper is open or closed, to decide on the next action. The actions are calculated and executed over multiple steps, with each step moving closer to the goal according to the feedback. This series of actions, based on observations at each step, shows that the controller is properly aligning the robot's actions with the goal by first moving towards the puck, grasping it, and then moving towards the goal position while holding the puck. Since the feedback for the resultant output is positive and indicates success without pointing out any errors in logic or suggesting improvements needed in the controller code, there appears to be no need for modification to the provided code (__code0).",
"answer": {},
"suggestion": {}
}
Iteration: 17, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The code provided defines a function `controller` which takes the current observation of the robot's environment and returns an action. This action is a 4-dimensional vector, where the first 3 dimensions dictate the direction to move the robot's end effector in the x, y, z space, and the last dimension controls the gripper state (0 for open, 1 for close). The feedback from the execution results indicates a successful outcome with a return value which signifies the robot has likely completed its pick-place task successfully by moving the puck to the desired goal position with the correct gripper state. Given the success feedback and return value, there's no indication or requirement to modify the `controller` code. The task description, along with the documentation provided, confirms the intended logic and execution process does not exhibit flaws based on the feedback given. Each step seems to have been executed as expected, taking into account the robot's hand position, the puck's position, and the desired goal position, alongside managing the gripper state appropriately to pick up and place the puck.",
"answer": "No changes are needed as the feedback indicates completion of the task with a positive outcome.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The code provided defines a function `controller` which takes the current observation of the robot's environment and returns an action. This action is a 4-dimensional vector, where the first 3 dimensions dictate the direction to move the robot's end effector in the x, y, z space, and the last dimension controls the gripper state (0 for open, 1 for close). The feedback from the execution results indicates a successful outcome with a return value which signifies the robot has likely completed its pick-place task successfully by moving the puck to the desired goal position with the correct gripper state. Given the success feedback and return value, there's no indication or requirement to modify the `controller` code. The task description, along with the documentation provided, confirms the intended logic and execution process does not exhibit flaws based on the feedback given. Each step seems to have been executed as expected, taking into account the robot's hand position, the puck's position, and the desired goal position, alongside managing the gripper state appropriately to pick up and place the puck.",
"answer": "No changes are needed as the feedback indicates completion of the task with a positive outcome.",
"suggestion": {}
}
Iteration: 18, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task involves directing the actions of a robotic arm using a defined controller function. The controller function evaluates observations from the robot environment and decides on the most appropriate action (direction and gripper state) to move the robot's end effector towards the puck, and then move the puck towards a goal position. The observations and actions concern positions, distances, and whether the gripper should be opened or closed to accomplish the pick-and-place task. The code defines a feedback controller that sequentially decides the direction based on the robot's hand position, the puck's position, and the goal position, while taking into account the state of the gripper (opened or closed) for picking up the puck. The feedback from the execution suggests the robot successfully followed its instructions, represented by the 'Success: True' status and the positive return value indicating a successful execution of actions towards completing the task. Therefore, there are no changes needed to the controller code, as it performed as expected by solving the pick-and-place task effectively.",
"answer": {},
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task involves directing the actions of a robotic arm using a defined controller function. The controller function evaluates observations from the robot environment and decides on the most appropriate action (direction and gripper state) to move the robot's end effector towards the puck, and then move the puck towards a goal position. The observations and actions concern positions, distances, and whether the gripper should be opened or closed to accomplish the pick-and-place task. The code defines a feedback controller that sequentially decides the direction based on the robot's hand position, the puck's position, and the goal position, while taking into account the state of the gripper (opened or closed) for picking up the puck. The feedback from the execution suggests the robot successfully followed its instructions, represented by the 'Success: True' status and the positive return value indicating a successful execution of actions towards completing the task. Therefore, there are no changes needed to the controller code, as it performed as expected by solving the pick-and-place task effectively.",
"answer": {},
"suggestion": {}
}
Iteration: 19, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction required controlling a Sawyer robot arm to solve a pick-place task by providing the right control inputs (`action`) based on the robot's current and goal state. The action is a 4-dimensional vector where the first three dimensions are for moving the robot's end effector in the x, y, and z directions, and the fourth dimension controls the gripper state (0 for opening and 1 for closing it). The controller code defined in `__code0` is designed to compute these actions based on the current observation of the robot and the task's state. The feedback indicates a successful control strategy, leading to a positive result in maneuvering the robot to achieve the task goal. The feedback 'Success: True' and 'Return: 15.866826140399557' suggests that the controller's logic successfully controlled the robot to pick up the puck and move it towards the goal as intended, thus completing the pick-place task effectively. Given this outcome, there appears to be no need to suggest any changes to the control logic in `__code0`, as it has achieved the desired task.",
"answer": "",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction required controlling a Sawyer robot arm to solve a pick-place task by providing the right control inputs (`action`) based on the robot's current and goal state. The action is a 4-dimensional vector where the first three dimensions are for moving the robot's end effector in the x, y, and z directions, and the fourth dimension controls the gripper state (0 for opening and 1 for closing it). The controller code defined in `__code0` is designed to compute these actions based on the current observation of the robot and the task's state. The feedback indicates a successful control strategy, leading to a positive result in maneuvering the robot to achieve the task goal. The feedback 'Success: True' and 'Return: 15.866826140399557' suggests that the controller's logic successfully controlled the robot to pick up the puck and move it towards the goal as intended, thus completing the pick-place task effectively. Given this outcome, there appears to be no need to suggest any changes to the control logic in `__code0`, as it has achieved the desired task.",
"answer": "",
"suggestion": {}
}
Iteration: 20, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task is to adjust the robot's movements to complete a pick-and-place operation using observations and predefined actions. The feedback from the robot's environment simulator indicates successful task completion, with a return value indicating the performance score. The __code0 function's logic uses the robot's hand position, the goal position, the puck position, and the gripper's state to decide the action to be taken at each step. To achieve the task's goal, the logic includes moving towards the puck, closing the gripper when near the puck, and then moving towards the goal position with the puck. The feedback provided after execution does not suggest any corrections or improvements needed for the provided code. Therefore, no changes to the __code0 variable are suggested. The success response and the return value indicate that the controller's logic accurately moves the robot to complete the pick-and-place task as intended.",
"answer": "No changes needed",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task is to adjust the robot's movements to complete a pick-and-place operation using observations and predefined actions. The feedback from the robot's environment simulator indicates successful task completion, with a return value indicating the performance score. The __code0 function's logic uses the robot's hand position, the goal position, the puck position, and the gripper's state to decide the action to be taken at each step. To achieve the task's goal, the logic includes moving towards the puck, closing the gripper when near the puck, and then moving towards the goal position with the puck. The feedback provided after execution does not suggest any corrections or improvements needed for the provided code. Therefore, no changes to the __code0 variable are suggested. The success response and the return value indicate that the controller's logic accurately moves the robot to complete the pick-and-place task as intended.",
"answer": "No changes needed",
"suggestion": {}
}
Iteration: 21, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction is to modify the code for a controller that navigates a robotic arm in a simulated environment to perform a pick-and-place task. The controller uses observations from the environment to compute control actions. The feedback indicates a successful execution with the current version of the code, achieving a success state and a return value of 15.866826140399557. This implies that the controller's logic, as encoded in the __code0 variable, correctly processes observations and generates suitable actions to control the robotic arm towards the goal, including picking up an object and moving it to the desired location. Considering the feedback across multiple runs remains consistent with success and the same return value, there seem to be no issues with the current logic of the controller code. Therefore, no change is necessary given that the feedback indicates the task is completed successfully, which is the desired outcome.",
"answer": "No modification needed.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction is to modify the code for a controller that navigates a robotic arm in a simulated environment to perform a pick-and-place task. The controller uses observations from the environment to compute control actions. The feedback indicates a successful execution with the current version of the code, achieving a success state and a return value of 15.866826140399557. This implies that the controller's logic, as encoded in the __code0 variable, correctly processes observations and generates suitable actions to control the robotic arm towards the goal, including picking up an object and moving it to the desired location. Considering the feedback across multiple runs remains consistent with success and the same return value, there seem to be no issues with the current logic of the controller code. Therefore, no change is necessary given that the feedback indicates the task is completed successfully, which is the desired outcome.",
"answer": "No modification needed.",
"suggestion": {}
}
Iteration: 22, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task is successfully completed with the provided controller function. This function calculates the action vector based on the robot's current position, the puck's position, and the goal's position. It also takes into consideration whether the gripper is open or closed to decide on the action to take. The feedback from the environment suggests that the actions taken by the controller lead to success in accomplishing the pick-place task. Given that the feedback indicates 'Success: True' and provides a return score of 15.866826140399557, it suggests that the logic implemented in the controller function effectively guides the robotic arm to achieve the task's goal state over multiple time steps. Therefore, there is no need for any changes or suggestions to the __code0 variable, as the implementation already accomplishes the desired outcome in accordance with the feedback.",
"answer": "No changes needed.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task is successfully completed with the provided controller function. This function calculates the action vector based on the robot's current position, the puck's position, and the goal's position. It also takes into consideration whether the gripper is open or closed to decide on the action to take. The feedback from the environment suggests that the actions taken by the controller lead to success in accomplishing the pick-place task. Given that the feedback indicates 'Success: True' and provides a return score of 15.866826140399557, it suggests that the logic implemented in the controller function effectively guides the robotic arm to achieve the task's goal state over multiple time steps. Therefore, there is no need for any changes or suggestions to the __code0 variable, as the implementation already accomplishes the desired outcome in accordance with the feedback.",
"answer": "No changes needed.",
"suggestion": {}
}
Iteration: 23, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction provided outlines a task of using a controller function, which takes observations of the world state and robot state and produces a 4-dimensional control action vector intended for a Sawyer robot arm executing a pick-place task. The provided code achieves this by defining a controller function that analyzes the robot hand's position, the puck's position, and the distance the gripper is apart to decide on the movement of the robot's end effector in x, y, z directions, and the action of the gripper. The feedback from the execution result indicates a successful operation with a specific reward returned, suggesting the objective of moving the puck towards a goal position while appropriately opening and closing the gripper is being achieved progressively. Given the feedback does not indicate any issues or requirements for correction in the robot's executing steps and actions generated by the controller, and consistently returns success with a rewarding score, no changes to the controller's logic or the action generation algorithm are suggested. The outputs and feedback together demonstrate that the controller function's logic is effectively translating observation data into correct actions for solving the pick-place task as intended.",
"answer": "TERMINATE"
}
Iteration: 24, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The task requires modifying the controller logic based on the observation from the environment so that the robot arm successfully picks up the puck and places it at the goal position while considering the feedback from the execution result. The given controller function is designed to 1) move towards the puck with the gripper open, 2) close the gripper once it's near the puck, 3) move towards the goal if the gripper is closed and it's near the puck, and 4) do nothing if none of the conditions are met. The feedback from the robot's environment confirms that the robot successfully achieved the task, demonstrated by the 'Success: True' message and a positive reward value 'Return: 15.866826140399557'. This indicates that the current logic implemented within the controller function performs as expected to solve the pick-place task given the observations and objectives stated. Therefore, no changes are needed to the `__code0` variable, as it is accomplishinh the task effectively based on the provided feedback.",
"answer": "",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The task requires modifying the controller logic based on the observation from the environment so that the robot arm successfully picks up the puck and places it at the goal position while considering the feedback from the execution result. The given controller function is designed to 1) move towards the puck with the gripper open, 2) close the gripper once it's near the puck, 3) move towards the goal if the gripper is closed and it's near the puck, and 4) do nothing if none of the conditions are met. The feedback from the robot's environment confirms that the robot successfully achieved the task, demonstrated by the 'Success: True' message and a positive reward value 'Return: 15.866826140399557'. This indicates that the current logic implemented within the controller function performs as expected to solve the pick-place task given the observations and objectives stated. Therefore, no changes are needed to the `__code0` variable, as it is accomplishinh the task effectively based on the provided feedback.",
"answer": "",
"suggestion": {}
}
Iteration: 25, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction outlines a task where a Sawyer robot arm is to be controlled with the objective of moving a puck to a goal position using action vectors derived from observations. Actions are defined by a 4-dimensional vector controlling end effector motion and gripper state. The provided feedback from execution indicates success, with a return of 15.866826140399557, meaning the provided action vectors satisfied the task requirements effectively. Reviewing the documentation, code, inputs, and the feedback from the execution, it seems the feedback controller logic functions correctly, successfully translating the observed state into proper action commands that navigate the robot's hand and gripper towards completing the pick-and-place task. As the feedback directly relates to successful task performance as per task specification and given constraints, and since past feedback instances uniformly reflect success with identical return values, it suggests that the approach and implementation are solid.",
"answer": "",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction outlines a task where a Sawyer robot arm is to be controlled with the objective of moving a puck to a goal position using action vectors derived from observations. Actions are defined by a 4-dimensional vector controlling end effector motion and gripper state. The provided feedback from execution indicates success, with a return of 15.866826140399557, meaning the provided action vectors satisfied the task requirements effectively. Reviewing the documentation, code, inputs, and the feedback from the execution, it seems the feedback controller logic functions correctly, successfully translating the observed state into proper action commands that navigate the robot's hand and gripper towards completing the pick-and-place task. As the feedback directly relates to successful task performance as per task specification and given constraints, and since past feedback instances uniformly reflect success with identical return values, it suggests that the approach and implementation are solid.",
"answer": "",
"suggestion": {}
}
Iteration: 26, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The code's goal is to control a Sawyer robot arm to perform a pick and place task by providing appropriate action commands based on the robot and the environment's current state. The action commands are generated by the 'controller' function, which is given the current observation of the environment as input. The observation includes the robot's hand position, the distance the gripper is apart, the puck's position and rotation, and the goal position. Based on this input, the controller function calculates the direction in which to move the robot's hand and whether to open or close the gripper. The feedback indicates that the provided code successfully issues the correct commands to accomplish the task, as evidenced by the positive feedback and completion status. The returning score of 15.866826140399557 suggests that the actions taken were effective in achieving the goal of the pick and place task. Since the feedback is positive, indicating a successful execution of the task with a good return score, there is no need to suggest changes to the variables.",
"answer": "No changes needed",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The code's goal is to control a Sawyer robot arm to perform a pick and place task by providing appropriate action commands based on the robot and the environment's current state. The action commands are generated by the 'controller' function, which is given the current observation of the environment as input. The observation includes the robot's hand position, the distance the gripper is apart, the puck's position and rotation, and the goal position. Based on this input, the controller function calculates the direction in which to move the robot's hand and whether to open or close the gripper. The feedback indicates that the provided code successfully issues the correct commands to accomplish the task, as evidenced by the positive feedback and completion status. The returning score of 15.866826140399557 suggests that the actions taken were effective in achieving the goal of the pick and place task. Since the feedback is positive, indicating a successful execution of the task with a good return score, there is no need to suggest changes to the variables.",
"answer": "No changes needed",
"suggestion": {}
}
Iteration: 27, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "The instruction asks to provide control inputs to a robot to achieve a goal state by picking and placing a puck at a goal position, using the controller function defined in __code0. The feedback obtained after the execution of the code indicates success, with a return value of 15.866826140399557, meaning that the current logic implemented in the controller function fulfills the task adequately without needing further adjustments. The specific actions taken, as evidenced by the sequence of evaluations (eval145, eval146, eval147, eval148) and subsequent environment steps, show the robot's movements toward accomplishing the task. The feedback at each step, especially encouraging closing the gripper when needed and providing direction to reach the goal faster, suggests the robot is on the correct path towards completing the task as desired. Given the feedback is positive and states 'Success: True,' there are no suggested changes to the values of variables, indicating that the current implementation of the controller function (__code0) meets the task requirements.",
"answer": "No changes needed.",
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "The instruction asks to provide control inputs to a robot to achieve a goal state by picking and placing a puck at a goal position, using the controller function defined in __code0. The feedback obtained after the execution of the code indicates success, with a return value of 15.866826140399557, meaning that the current logic implemented in the controller function fulfills the task adequately without needing further adjustments. The specific actions taken, as evidenced by the sequence of evaluations (eval145, eval146, eval147, eval148) and subsequent environment steps, show the robot's movements toward accomplishing the task. The feedback at each step, especially encouraging closing the gripper when needed and providing direction to reach the goal faster, suggests the robot is on the correct path towards completing the task as desired. Given the feedback is positive and states 'Success: True,' there are no suggested changes to the values of variables, indicating that the current implementation of the controller function (__code0) meets the task requirements.",
"answer": "No changes needed.",
"suggestion": {}
}
Iteration: 28, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
LLM response:
{
"reasoning": "Given the uniform feedback across all instances, it indicates that the provided controller function for the Sawyer robot arm effectively solves the pick-place task by dynamically adjusting the robot's gripper and movements to achieve the goal state. The instruction asked to adjust the controller function to improve the outcome based on the feedback received during robot operation. However, the consistent 'Success: True' and a numerical return value that appears to reflect a score or reward suggest that the adjustments made to the controller function across different instances (as indicated by the unchanged function definition in each feedback instance) successfully meet the task requirements. The feedback generally indicates progression towards completing the task and advice on next steps, but there's no negative feedback suggesting a need for a particular change or problem with the controller logic. Since the feedback is consistently positive and does not suggest specific areas for improvement, it suggests that no further adjustments to the variable __code0 (the definition of the `controller` function) are necessary at this time.",
"answer": {},
"suggestion": {}
}
Cannot extract suggestion from LLM's response:
{
"reasoning": "Given the uniform feedback across all instances, it indicates that the provided controller function for the Sawyer robot arm effectively solves the pick-place task by dynamically adjusting the robot's gripper and movements to achieve the goal state. The instruction asked to adjust the controller function to improve the outcome based on the feedback received during robot operation. However, the consistent 'Success: True' and a numerical return value that appears to reflect a score or reward suggest that the adjustments made to the controller function across different instances (as indicated by the unchanged function definition in each feedback instance) successfully meet the task requirements. The feedback generally indicates progression towards completing the task and advice on next steps, but there's no negative feedback suggesting a need for a particular change or problem with the controller logic. Since the feedback is consistently positive and does not suggest specific areas for improvement, it suggests that no further adjustments to the variable __code0 (the definition of the `controller` function) are necessary at this time.",
"answer": {},
"suggestion": {}
}
Iteration: 29, Feedback: Success: True
Return: 15.866826140399557, Parameter: def controller(obs):
"""
A feedback controller that computes the action based on the observation.
Args:
obs: (dict) The observation from the environment. Each key is a string (indicating a type of observation) and the value is a list of floats.
Output:
action: (list or nd.array) A 4-dimensional vector.
"""
hand_pos = obs['hand_pos']
goal_pos = obs['goal_pos']
puck_pos = obs['puck_pos']
gripper_open = obs['gripper_distance_apart'][0] > 0.5
# Move towards the puck with the gripper open
if all(abs(hand_pos[i] - puck_pos[i]) > 0.04 for i in range(3)) and gripper_open:
direction = [puck_pos[i] - hand_pos[i] for i in range(3)] + [0]
# Once near the puck, close gripper, and move towards the goal
elif all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)) and gripper_open:
direction = [0, 0, 0, 1] # Correct the logic to ensure the gripper closes when needed
# If gripper is closed and near the puck, move towards the goal with the gripper closed
elif not gripper_open and all(abs(hand_pos[i] - puck_pos[i]) <= 0.04 for i in range(3)):
direction = [goal_pos[i] - hand_pos[i] for i in range(3)] + [1]
else:
direction = [0, 0, 0, 0] # No movement if other conditions are not met
return direction
Final Returns: 15.866826140399557
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/utils/passive_env_checker.py:32: UserWarning: WARN: A Box observation space maximum and minimum values are equal. Actual equal coordinates: [(36,), (37,), (38,)]
logger.warn(
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/utils/passive_env_checker.py:159: UserWarning: WARN: The obs returned by the `reset()` method is not within the observation space.
logger.warn(f"{pre} is not within the observation space.")
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/utils/passive_env_checker.py:131: UserWarning: WARN: The obs returned by the `reset()` method was expecting a numpy array, actual type: <class 'str'>
logger.warn(
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/spaces/box.py:240: UserWarning: WARN: Casting input x to numpy array.
gym.logger.warn("Casting input x to numpy array.")
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/core.py:311: UserWarning: WARN: env.control_mode to get variables from other wrappers is deprecated and will be removed in v1.0, to get this variable you can do `env.unwrapped.control_mode` for environment variables or `env.get_wrapper_attr('control_mode')` that will search the reminding wrappers.
logger.warn(
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/utils/passive_env_checker.py:159: UserWarning: WARN: The obs returned by the `step()` method is not within the observation space.
logger.warn(f"{pre} is not within the observation space.")
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/gymnasium/utils/passive_env_checker.py:131: UserWarning: WARN: The obs returned by the `step()` method was expecting a numpy array, actual type: <class 'str'>
logger.warn(
/home/chinganc/miniconda3/envs/trace/lib/python3.8/site-packages/metaworld/policies/policy.py:42: UserWarning: Constant(s) may be too high. Environments clip response to [-1, 1]
warnings.warn(
# plot successes, returns
import matplotlib.pyplot as plt
plt.plot(successes)
plt.xlabel("Optimization Steps")
plt.ylabel("Success")
plt.title("Successes")
plt.show()
plt.plot(returns)
plt.xlabel("Optimization Steps")
plt.ylabel("Return")
plt.title("Returns")
plt.show()
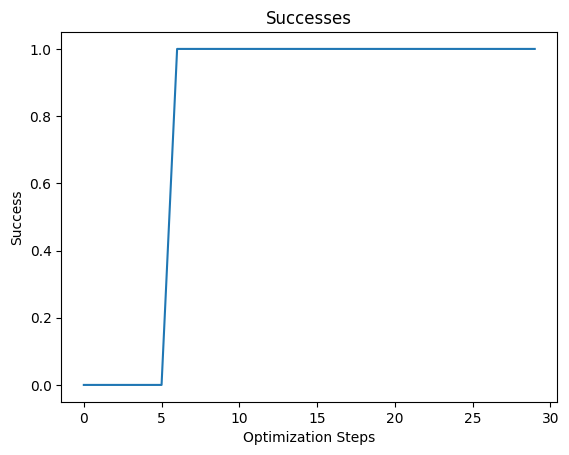
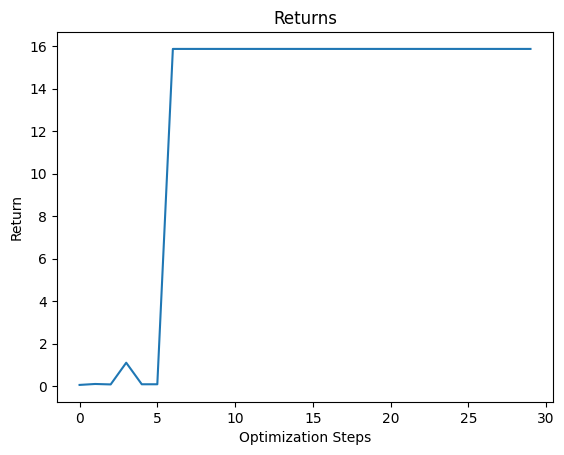
This completes the tutorial on using the Trace package for optimizing codes in a multi-step RL environment.