ABB makes ROS nodes available on Windows
ABB Robotics is a market leader and a technology fore-runner in the robotics space. ABB today has over 400,000 robotic solutions deployed world-wide across diverse verticals like automotive, manufacturing, pharmaceuticals, food processing etc boosting industrial productivity, reducing labor and energy costs and ensuring a healthy and safe working environment for humans.
ABB offers a slew of industrial robots like the collaborative robots, paint robots and robotic arms along with their proprietary software such as the Robostudio and Robotic controllers. The RobotStudio is ABB’s programming and configuration software including an offline simulation environment. The offline simulation environment uses a virtual controller which mimics a real controller enabling realistic simulations during development. The robotic controllers runs the RobotWare software, which provides motion control, hardware integrations, multi-tasking and programmability enabling the precision, speed and synchronization of robots.
At Microsoft, the Edge Robotics team ported Robot Operating System - ROS™ 1 on Windows 10 IoT Enterprise and Windows 10 Desktop in May, 2019. Microsoft is committed to meeting our customers where they are at. With the growing ROS community and the increased adoption of ROS on industrial robots, ROS on Windows enables Microsoft to bring the innovations of edge computing to robots.
At ABB, the recent wave of adoption of ROS by the open-source community, motivated Roger Kullang, the Chief Engineer Software Products at ABB to explore ways in which he could create and use ROS packages to augment the robot controller with additional capabilities. One of the primary reasons for ABB to support ROS was to enable system integrators and universities to integrate their ROS based robotic applications with ABB’s proprietary robotic controllers. Roger said “ROS helps ABB stay relevant in the fast pacing world of industrial robotics. At ABB, we also believe that openness is the best way to win new innovative partners and customers of the future. Integrating with ROS is a great opportunity to make ABB the preferred industrial robot vendor for ROS users and to increase the market reach of our digital offerings in the future.” With ROS1 now supported on Windows, Roger can bring up ROS and RobotStudio on the same Windows machine to commission the robot and run simulations. This meant that the simulation tests were now more realistic because the virtual controller running on RobotStudio truly mimics the capabilities of the robot controller and is a lot easier to work because he no longer needs to switch between multiple machines.
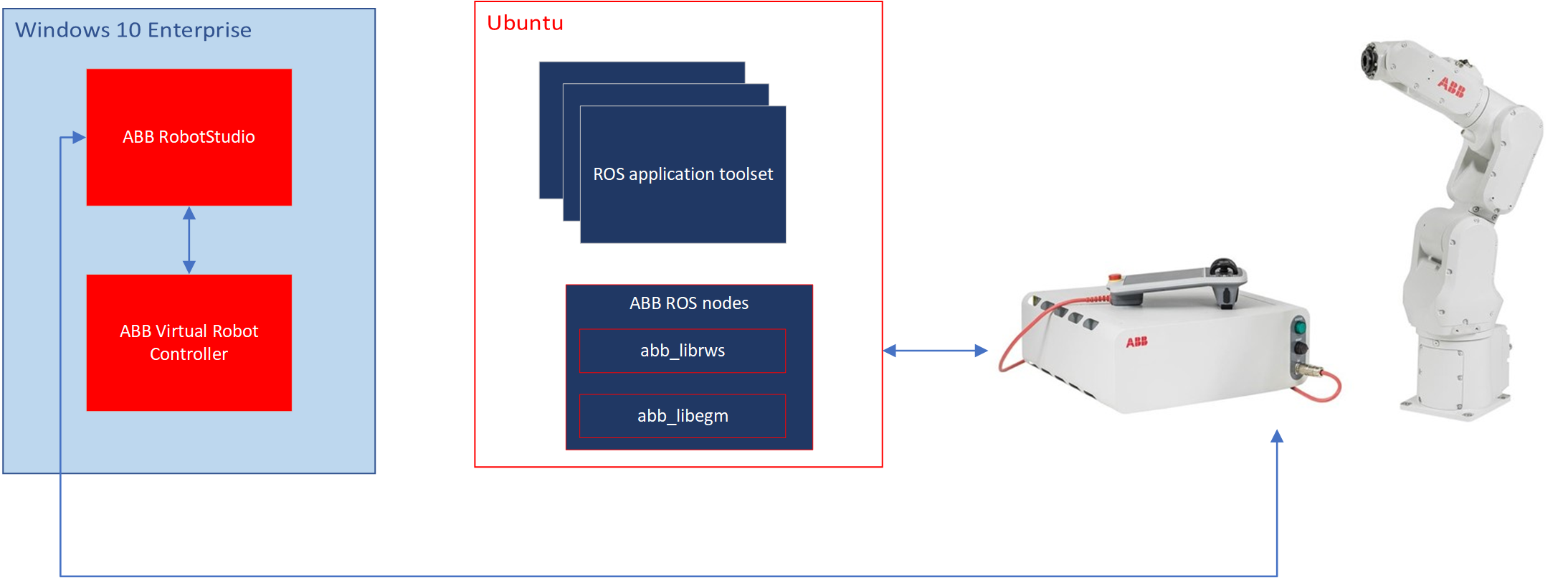
ABB ported the following libraries to work on Windows
- abb_libegm: C++ library for interfacing with ABB robot controllers supporting Externally Guided Motion
- abb_librws: the C++ library for interfacing with ABB robot controllers supporting Robot Web Services (RWS)
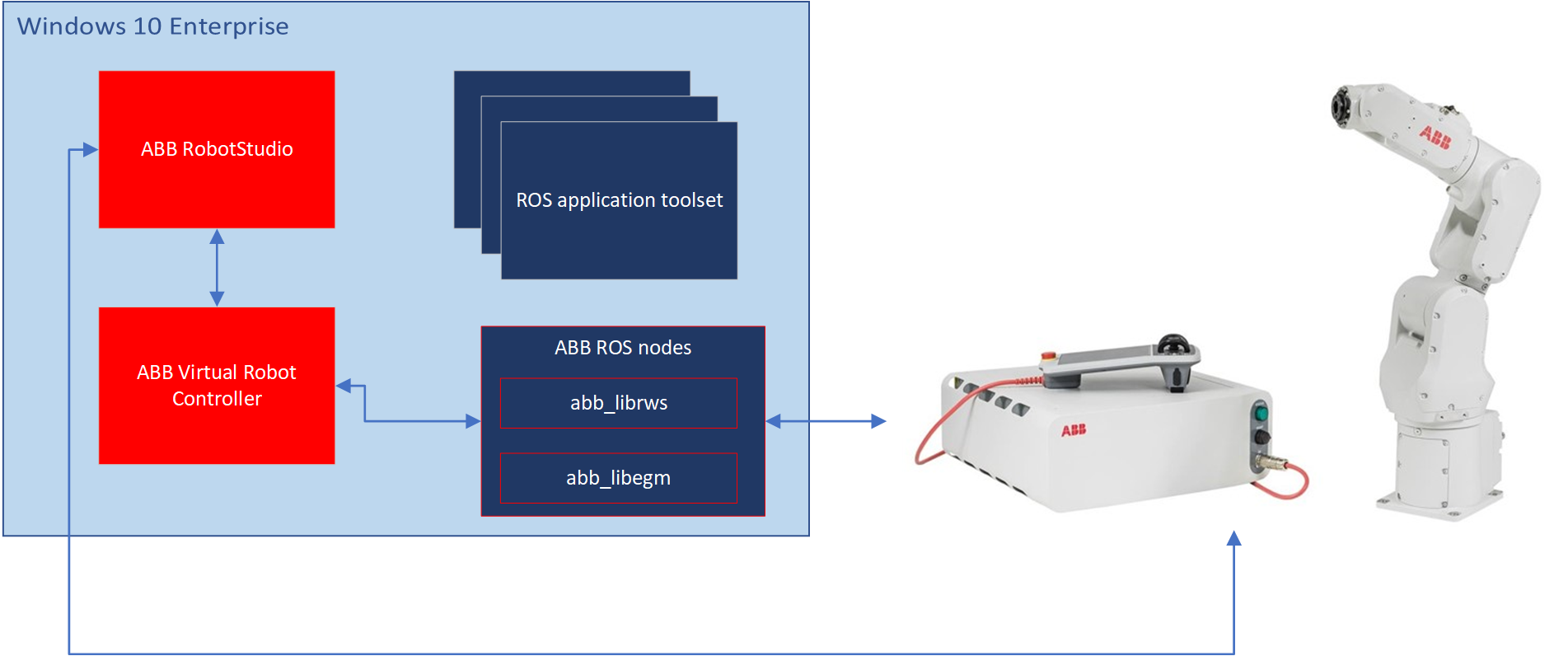
These libraries enabled ABB to use their ROS based toolsets on both the virtual controller running on the RobotStudio as well as the robotic controller connected to the real robot. This meant:
- Consistent robot behavior both in simulation i.e virtual controller and on the robotic controller.
- Engineers could run simulation either using RobotStudio or use ROS based simulation environments like Gazebo for the ROS controlled mobile platform
- Combine the benefits of both the RobotStudio and ROS tools. Customers can use RobotStudio for safety zones, Profinet configurations or RS PowerPacs, which are not provided by ROS tools and use ROS to easily integrate external sensors to the robot or leverage GPU for compute intensive tasks like image recognition.
- Easily switch between using ROS tools and RobotStudio to control the robot without connecting to different machines.
ABB said “Running ROS and RobotStudio on the same computer makes it easy for a ROS user to use RobotStudio for the parts where RobotStudio is strong and may increase the interest for the traditional ABB robot user to start exploring the ROS ecosystem. It is a win-win situation.”
To learn more about ROS on Windows visit https://aka.ms/ros.
DISCLAIMER: This document is for informational purposes only. MICROSOFT MAKES NO WARRANTIES, EXPRESS OR IMPLIED, IN THIS SUMMARY.
-
ROS is a trademark of Open Robotics. ↩