Playback#
AirSim supports playing back the high level commands in a *.mavlink log file that were recorded using the MavLinkTest app for the purpose of comparing real and simulated flight. The recording.mavlink is an example of a log file captured using a real drone using the following command line:
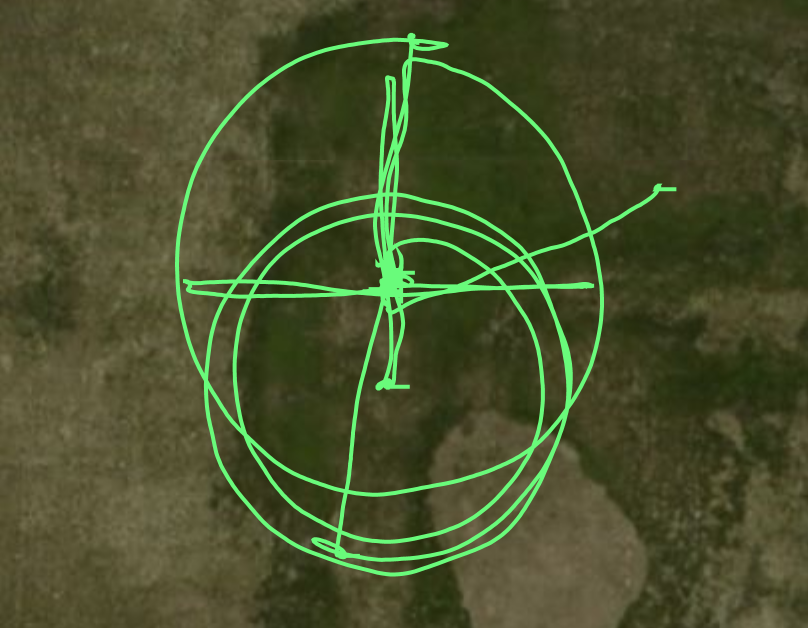
MavLinkTest -serial:/dev/ttyACM0,115200 -logdir:. Then the log file contains the commands performed, which included several "orbit" commands, the resulting GPS map of the flight looks like this:
Side-by-side comparison#
Now we can copy the *.mavlink log file recorded by MavLinkTest to the PC running the Unreal simulator with AirSim plugin. When the Simulator is running and the drone is parked in a place in a map that has room to do the same maneuvers we can run this MavLinkTest command line:
MavLinkTest -server:127.0.0.1:14550This should connect to the simulator. Now you can enter this command:
PlayLog recording.mavlink
Note: I'm using the ';' key in the simulator to take control of camera position using keyboard to get this shot.
Parameters#
It may help to set the simulator up with some of the same flight parameters that your real drone is using, for example,
in my case I was using a lower than normal cruise speed, slow takeoff speed, and it helps to tell the simulator to
wait a long time before disarming (COM_DISARM_LAND) and to turn off the safety switches NAV_RCL_ACT and NAV_DLL_ACT
(don't do that on a real drone).
param MPC_XY_CRUISE 2
param MPC_XY_VEL_MAX 2
param MPC_TKO_SPEED 1
param COM_DISARM_LAND 60
param NAV_RCL_ACT 0
param NAV_DLL_ACT 0