Point Clouds#
Moved here from https://github.com/microsoft/AirSim/wiki/Point-Clouds
A Python script point_cloud.py shows how to convert the depth image returned from AirSim into a point cloud.
The following depth image was captured using the Modular Neighborhood environment:

And with the appropriate projection matrix, the OpenCV reprojectImageTo3D function can turn this into a point cloud. The following is the result, which is also available here: https://skfb.ly/68r7y.
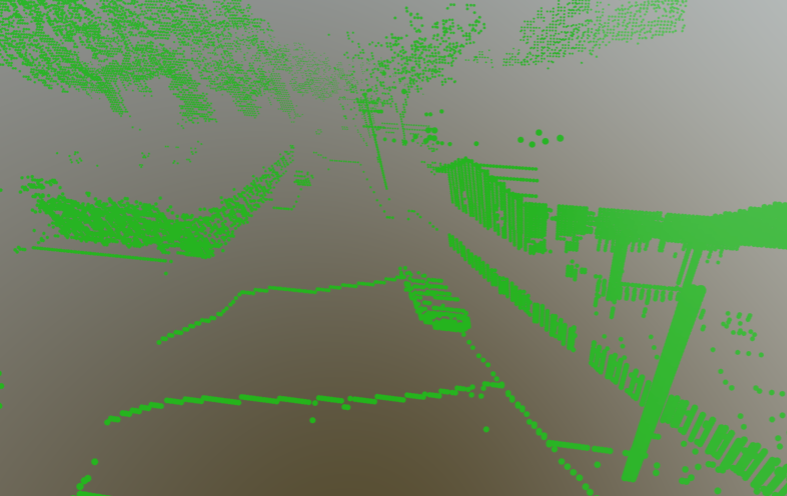
SketchFab can upload the resulting file cloud.asc and render it for you.
PS: you may notice the scene is reflected on the Y axis, so I may have a sign wrong in the projection matrix. An exercise for the reader :-)